






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
💥1 概述
基于PID控制的四旋翼飞行器仿真研究
近几年,随着科技发展,各种传感器技术和通信技术不断突破,无人机技术也发展迅速,在军事侦察、交通巡逻、景色航拍、高空电缆巡检等诸多应用领域已经发挥了重要的作用。四旋翼无人机以其具有的操作灵活、地形上限制小、携带时方便以及成本低廉等特点,更加紧密贴近了我们的日常生活,因此,对无人机进行研究具有很大的学术价值和意义。
传统的PID由比例、积分、微分三部分组成,通过调节Kp、Ki、Kd的数值可以实现不同的控制效果如图所示。PID控制算法的核心是用偏差来消除偏差,该算法可以对控制系统进行有效的估计:

一、PID控制基本原理及数学模型
- 核心组成
PID控制由比例(P)、积分(I)、微分(D)三部分组成,分别通过误差的当前值、历史累积和变化率生成控制信号。其连续时间域数学模型为: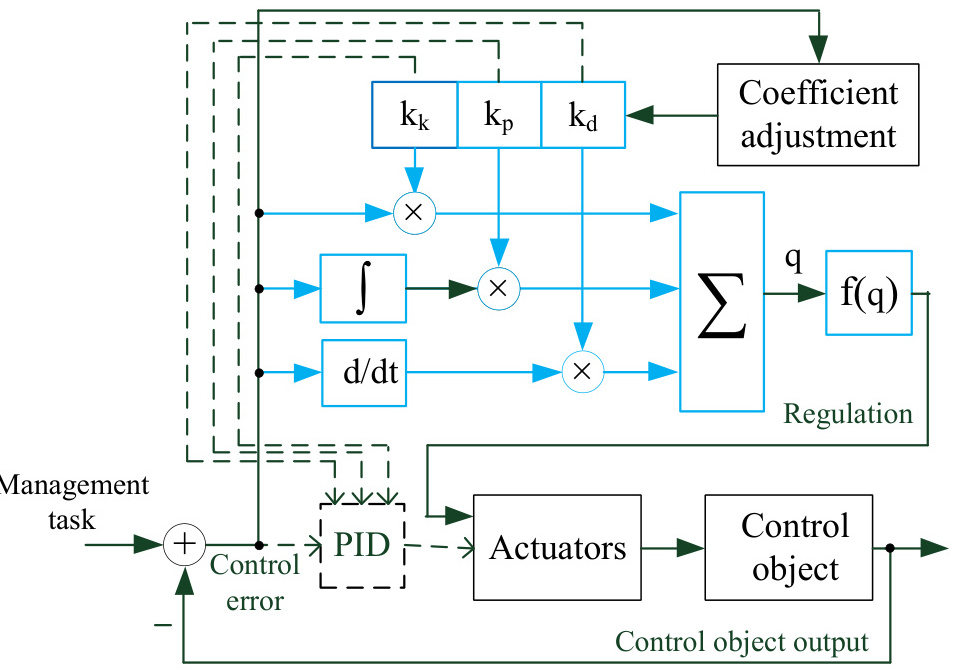

其中,e(t)=r(t)−y(t)为设定值与实际输出的偏差。
-
各部分作用
- 比例项(K_p) :快速响应误差,但过大易引起振荡;
- 积分项(K_i) :消除稳态误差,但过强会导致超调;
- 微分项(K_d) :预测误差趋势,抑制超调,但对噪声敏感。
-
传递函数形式

离散化后需转化为差分方程实现。
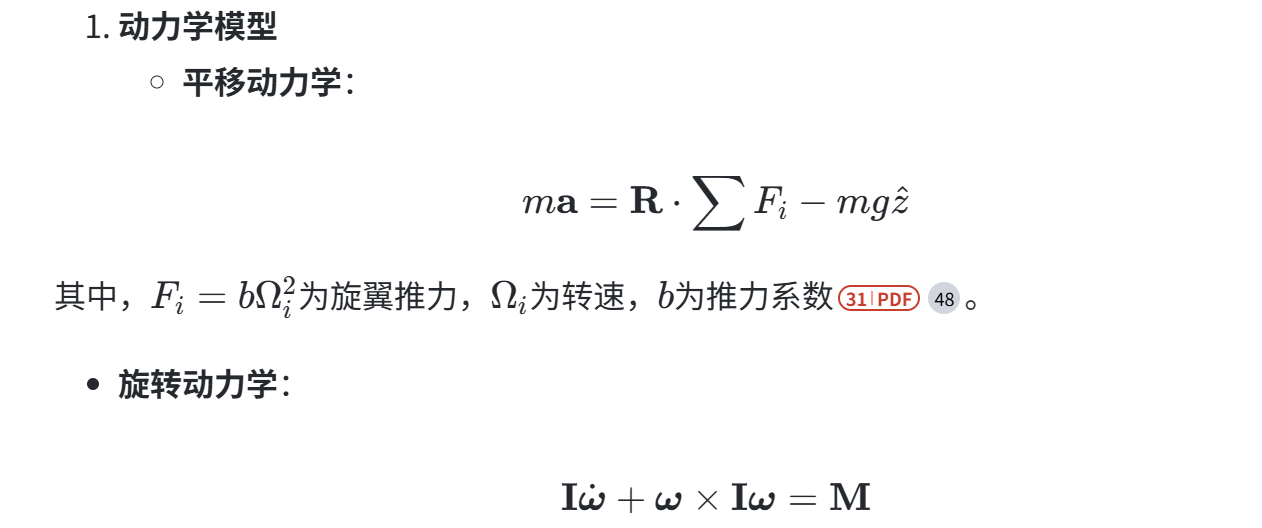
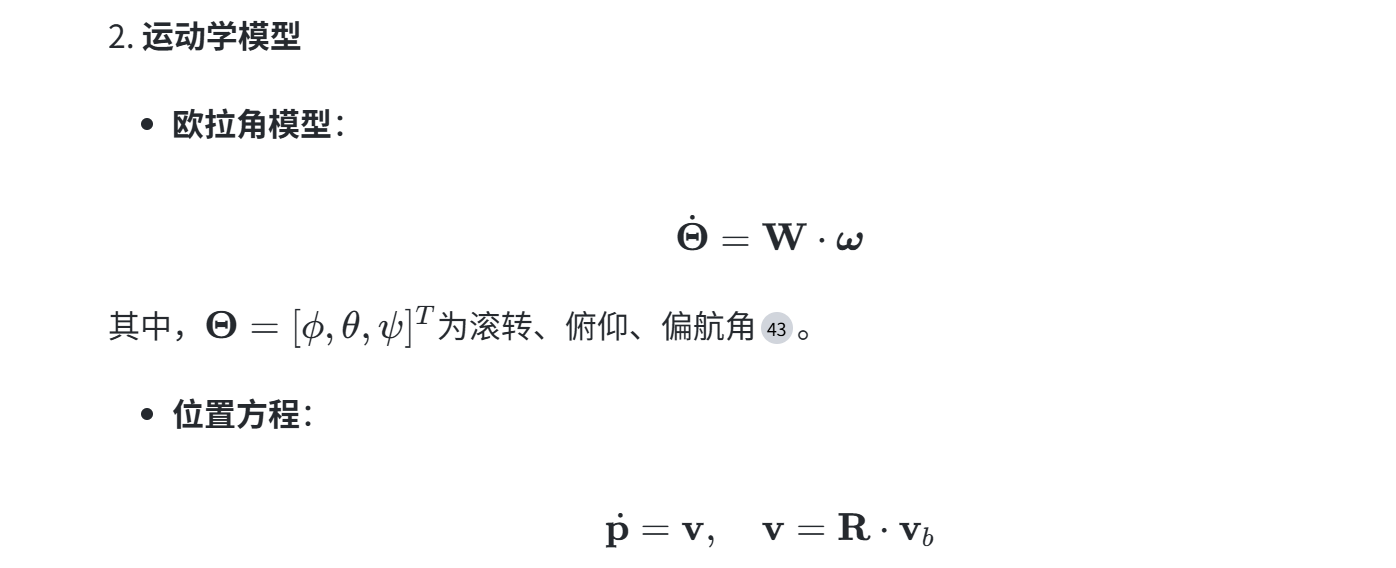
二、四旋翼飞行器动力学与运动学模型
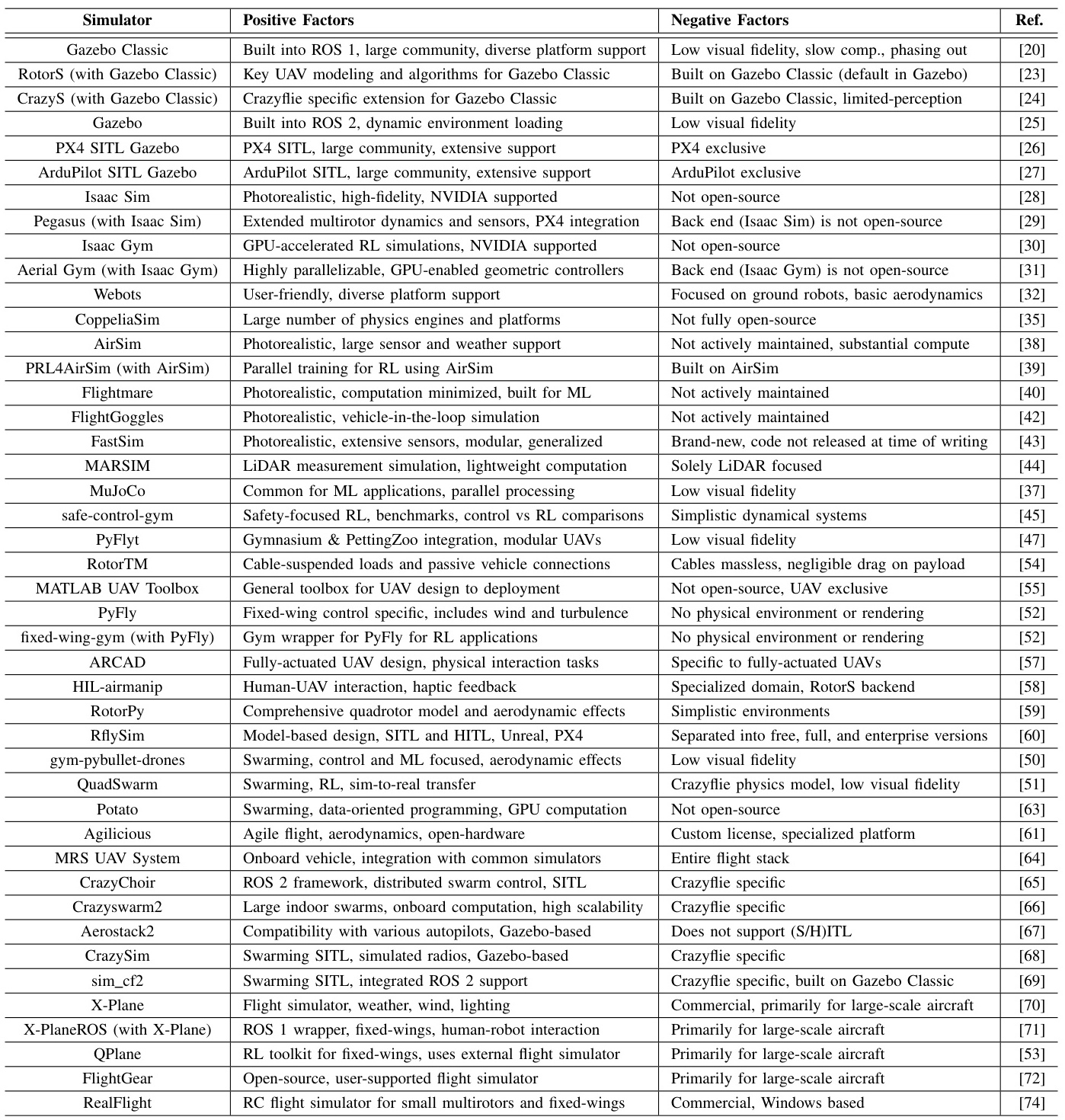
三、仿真工具与实现方法
-
MATLAB/Simulink
- 模型搭建:通过子系统模块化设计,分设姿态环(内环)和位置环(外环)控制器,结合四旋翼动力学模块。
- 参数整定:支持Ziegler-Nichols法、粒子群优化(PSO)等算法,通过阶跃响应分析调节参数。
- 案例:某研究在Simulink中实现串级PID,优化后姿态角跟踪误差减少35%。
-
ROS/Gazebo
- 联合仿真:Simulink生成控制指令,通过ROS节点发送至Gazebo中的四旋翼模型,实现物理引擎级仿真。
- 优势:支持复杂环境模拟(如风扰动)和硬件在环(HIL)测试。
四、PID参数整定方法
-
经典方法
- Ziegler-Nichols法:
-
逐步增大KpKp直至系统出现等幅振荡,记录临界增益KcKc和周期TcTc;
-
按公式计算Kp=0.6Kc, Ti=0.5Tc, Td=0.125Tc 。
- 应用案例:某四旋翼采用Z-N法整定后,动态调整时抖动幅度降低60%。
-
智能优化算法
- 粒子群优化(PSO) :以积分平方误差(ISE)为适应度函数,搜索最优PID参数,较传统Z-N法减少超调量20%。
- 改进策略:结合模糊逻辑动态调整PID参数,适应非线性扰动。
五、性能评估指标
-
核心指标
- 稳态误差:反映系统跟踪精度,积分项主导其消除。
- 响应时间:包括上升时间(10%~90%目标值)和调节时间(进入±2%稳态值)。
- 超调量:最大瞬态偏差与稳态值的百分比,微分项可抑制。
-
量化方法
- 积分误差指标:如ISE(积分平方误差)、IAE(积分绝对误差),用于对比控制器优劣。
- 仿真验证:某研究显示,模糊PID的ISE较传统PID降低42%,调节时间缩短至5秒。
六、现有研究案例
-
经典PID控制
- 李俊等(2019)通过Simulink验证PID在气流扰动下的有效性,姿态角稳态误差≤0.02 rad。
-
智能优化PID
- Gün等(2022)采用PSO优化参数,强风环境下轨迹跟踪误差降低12%。
-
混合控制策略
- 冯立杰等(2024)设计双闭环模糊PID,响应速度提升20%,适用于高速机动场景。
七、挑战与未来方向
-
局限性
- 模型依赖性强:传统PID对高阶耦合动力学适应性差。
- 抗扰能力不足:需结合前馈补偿或滑模控制增强鲁棒性。
-
前沿方向
- 多算法融合:如神经网络PID自适应整定。
- 数字孪生仿真:结合Unreal Engine高保真环境模拟。
📚2 运行结果





部分代码:
I = [Ixx 0 0;0 Iyy 0;0 0 Izz];
Jtp = 104e-6;
Ke = 6.3e-3;
Km = 6.3e-3;
L = 15e-6;
b = 54.2e-6;
l = 0.24;
g = 9.81;
n = 0.9;
N = 5.6;
h = 1e-3;
R = 0.6;
d = 1.1e-6; % drag factor
% Motor Controller Design
Kp_position = 5;
Ki_position = 0;
Kd_position = 10;
Kp_angle = 5*2;
Ki_angle = 0;
Kd_angle = 10*2;
Kp_motor = 1;
Ki_motor = 10;
Kd_motor = 0;
%w'=Apw+Bpv+Cp
Ap = -22.5;
Bp = 509;
Cp = 489;
a1 = Ap;
b1 = Bp;
c1 = 1;
d1 = 0;
sys_c_m = ss(a1,b1,c1,d1);
Gc_m = tf(sys_c_m);
sys_d_m = c2d(sys_c_m,h,'zoh');
Gd_m = tf(sys_d_m);
Cc_m = tf([Kp_motor Ki_motor],[1 0]);
sys_c_mctrl = ss(Cc_m);
sys_d_mctrl = c2d(sys_c_mctrl,h,'tustin');
Cd_m = tf(sys_d_mctrl);
LGd_m = Gd_m*Cd_m;
Td_m = feedback(LGd_m,1);
figure(1)
margin(LGd_m)
hold on
grid on
figure(2)
step(Td_m)
hold on
grid on
num = [1];
den = [1 0 0];
Gc_p = tf(num,den);
sys_c_p = ss(Gc_p);
sys_d_p = c2d(sys_c_p,h,'zoh');
Gd_p = tf(sys_d_p);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]耿增显,孟庆茂,赵嶷飞,韩红蓉. 基于Simulink四旋翼无人机PID控制[C]//.第九届中国指挥控制大会论文集.,2021:540-545.DOI:10.26914/c.cnkihy.2021.011229.
[2]汪震东,张艳.四旋翼无人机预测-PID复合控制研究[J].控制工程,2021,28(07):1390-1397.DOI:10.14107/j.cnki.kzgc.20190156.
[3]李国洪,卫鹏飞,高冉.基于四旋翼无人机的粒子群PID控制研究[J].工业控制计算机,2022,35(02):102-104.

















 7414
7414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









