






💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
基于Dijkstra、A*和动态规划的移动机器人路径规划研究
💥1 概述
在基于采样的方法中,需要在落在给定地图的未占用区域的地图上生成一定数量的点。然后,我们计算哪个节点与哪些节点有连接。通过这种方式,获得了生成的随机点的无向图。
为了生成这些点,可以使用一些复杂的方法来尽可能聪明地在地图周围分布节点。但是在那个存储库中,选择通过均匀随机来生成它们。生成了100个节点,这些节点位于地图的自由区域。有给定的映射,生成的节点及其连接。
通过Dijkstra、Astar和动态规划测试了102个节点图路径规划。
在移动机器人路径规划中,Dijkstra、A*和动态规划是常用的算法。
- Dijkstra算法:这是一个非常基础的图搜索算法,常用于寻找两点之间的最短路径。Dijkstra算法的主要缺点是它不考虑任何关于目标的信息,因此可能会扩展很多不必要的节点。
- A*算法:A算法是一种更高级的图搜索算法,使用了启发式函数来指导搜索。A算法通过预估函数评估搜索的方向,从而加快找到目标的速度。A*算法的主要优点是它可以快速找到最短路径,但是在复杂的环境中,预估函数的选择可能会影响到搜索的效果。
- 动态规划:动态规划是一种优化技术,通常用于解决可以通过优化子问题来解决的问题。在路径规划问题中,动态规划可以用来寻找最优路径,但是在高维度的状态空间中,动态规划的复杂度可能会非常高。
对于移动机器人的路径规划问题,通常是在一个给定的环境地图中寻找从起始点到目标点的最优路径。这个问题可以通过将地图表示为一个图,然后使用Dijkstra、A*或动态规划来解决。每个节点可以代表地图中的一个位置,边可以代表从一个位置到另一个位置的移动。每个边的权重可以代表移动的成本,比如距离或者能量消耗。
具体选择哪种算法取决于具体的问题和需求。例如,如果需要快速找到最短路径,A*算法可能是一个好的选择。如果需要考虑更复杂的约束,比如机器人的运动能力或者环境的动态变化,可能需要使用动态规划。
Dijkstra算法、A*算法和动态规划都是常用的路径规划算法,它们可以用于移动机器人路径规划。
Dijkstra算法是一种广度优先搜索算法,用于求解带权重的图中的最短路径。它通过不断更新起点到各个节点的最短路径,并选择距离最短的节点作为下一个位置,直到找到终点或者遍历完所有节点。Dijkstra算法适用于无障碍物的静态环境。
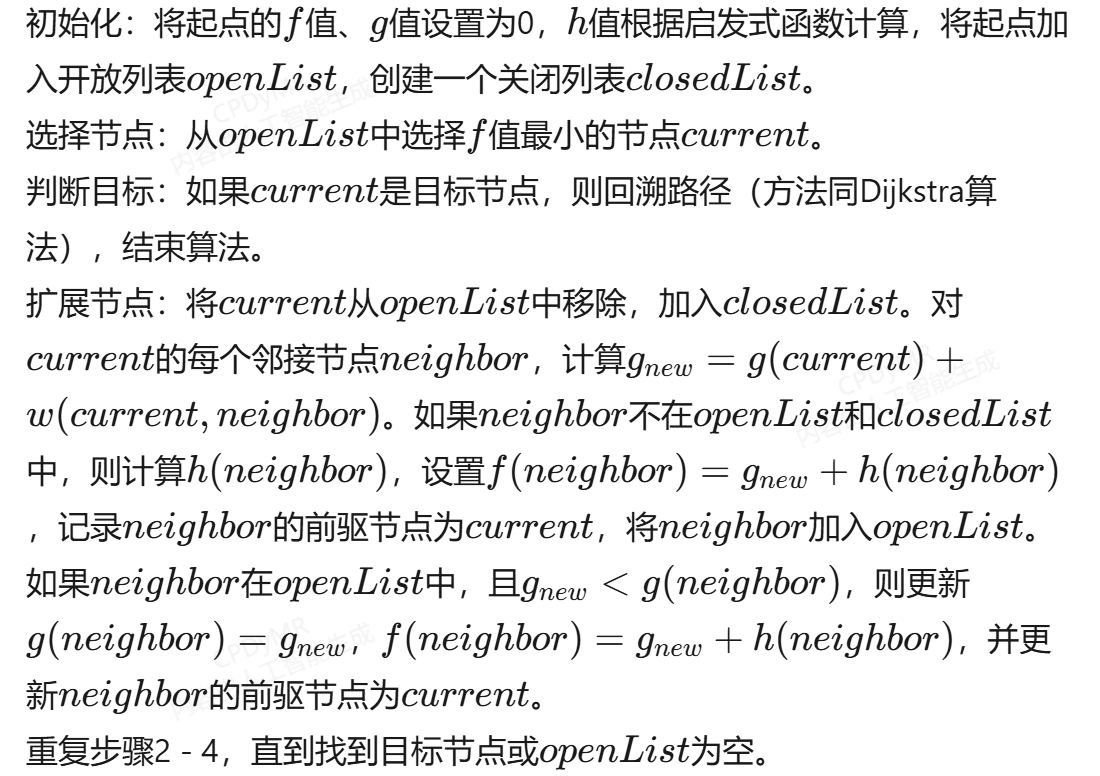
A*算法是一种启发式搜索算法,结合了广度优先搜索和启发式函数,用于求解图中的最短路径。它通过维护一个开放列表和计算每个节点的估计代价函数(一般是距离加权和),选择代价最小的节点作为下一个位置,直到找到终点或者遍历完所有节点。A*算法适用于有障碍物的静态环境,通过启发式函数可以加快搜索速度。
动态规划是一种求解最优化问题的方法,适用于需要考虑路径中的其他因素,如时间、能量等。它通过定义状态和状态转移方程,将问题划分为子问题并求解,最终得到全局最优解。动态规划可以应对环境中的动态变化,适用于复杂的移动机器人路径规划问题。
综合应用这三种算法,可以根据具体情况选择适合的路径规划策略。例如,可以先使用A*算法进行整体路径规划,然后再使用Dijkstra算法或动态规划对细节进行优化,考虑障碍物、动态环境等因素来保证路径的安全性和效率。
基于Dijkstra、A*和动态规划的移动机器人路径规划研究
摘要:本文聚焦于移动机器人路径规划领域,深入探讨Dijkstra算法、A*算法和动态规划算法在该领域的应用。通过对这三种算法原理、特点的分析,并进行实验对比,明确其在不同场景下的性能表现,为移动机器人路径规划算法的合理选择提供理论依据。
一、引言
移动机器人路径规划作为人工智能领域的关键研究课题,旨在为机器人在给定环境中找到从起点至目标点的最佳运动路径。这一技术在工业生产、物流配送、服务机器人等众多领域有着广泛的应用前景。随着机器人技术的不断发展,对路径规划算法的准确性、高效性和适应性提出了更高要求。在过去几十年里,众多路径规划算法被提出与研究,其中Dijkstra算法、A*算法和动态规划算法备受关注。深入研究这三种算法对于推动移动机器人技术的发展具有重要意义。
二、相关算法原理
(一)Dijkstra算法
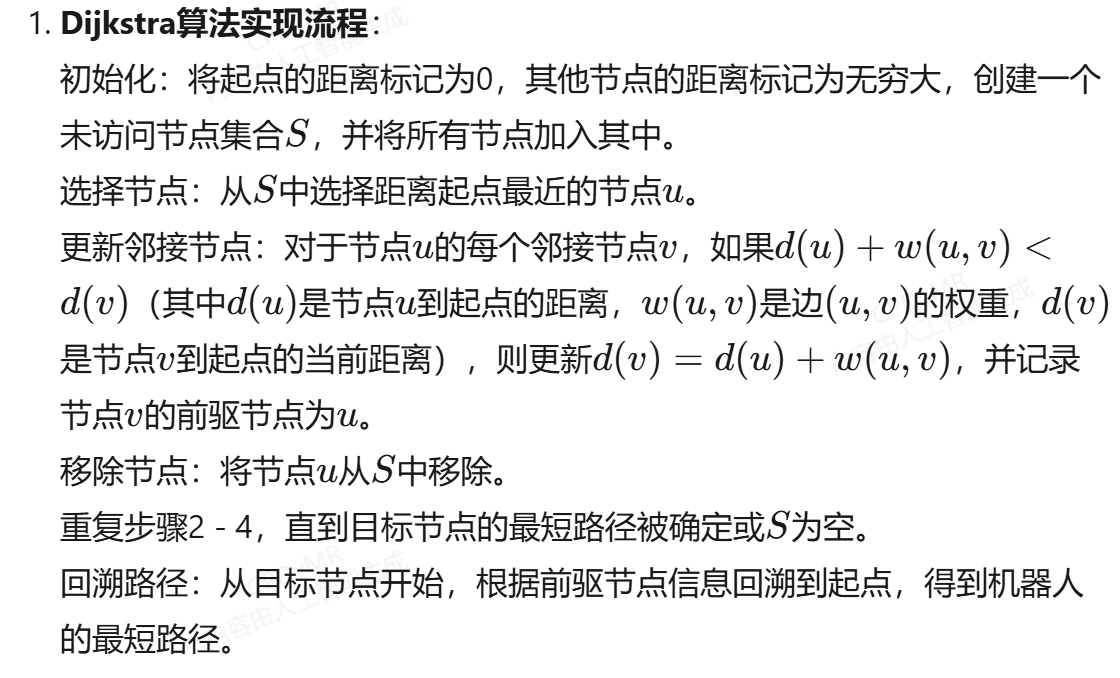
Dijkstra算法是一种经典的图搜索算法,广泛应用于求解两点之间的最短路径问题。该算法的核心思想是通过计算每个节点到起点的最短路径来逐步确定最终路径。在移动机器人路径规划中,将机器人的运动环境抽象为带权有向图,节点代表机器人可能到达的位置,边的权重表示相邻节点间的移动代价(如距离、时间等)。算法初始化时,将起点的距离标记为0,其他节点的距离标记为无穷大。然后,不断从尚未确定最短路径的节点中选择距离起点最近的节点,更新其邻接节点的距离。重复这一过程,直至目标节点的最短路径被确定。然而,由于Dijkstra算法需要计算所有节点之间的距离,对于大规模的图来说,计算复杂度较高(时间复杂度为O(V2)O(V2),其中VV为节点数),在实际应用中存在一定局限性。
(二)A*算法
A算法是一种启发式搜索算法,结合了Dijkstra算法的最短路径计算和启发式函数的估计。该算法通过估计每个节点到目标点的距离来选择下一个节点,从而减少不必要的搜索,提高计算效率。A算法的评估函数为f(n)=g(n)+h(n)f(n)=g(n)+h(n),其中f(n)f(n)是节点nn的综合评估值,g(n)g(n)是从起点到节点nn的实际代价,h(n)h(n)是从节点nn到目标点的估计代价(启发式函数)。在搜索过程中,A算法优先选择f(n)f(n)值最小的节点进行扩展。启发式函数的设计至关重要,合理的启发式函数能够使A算法在保证找到最优路径的前提下,显著减少搜索空间和计算时间。例如,在二维平面环境中,常用曼哈顿距离或欧几里得距离作为启发式函数来估计节点到目标点的距离。
(三)动态规划算法
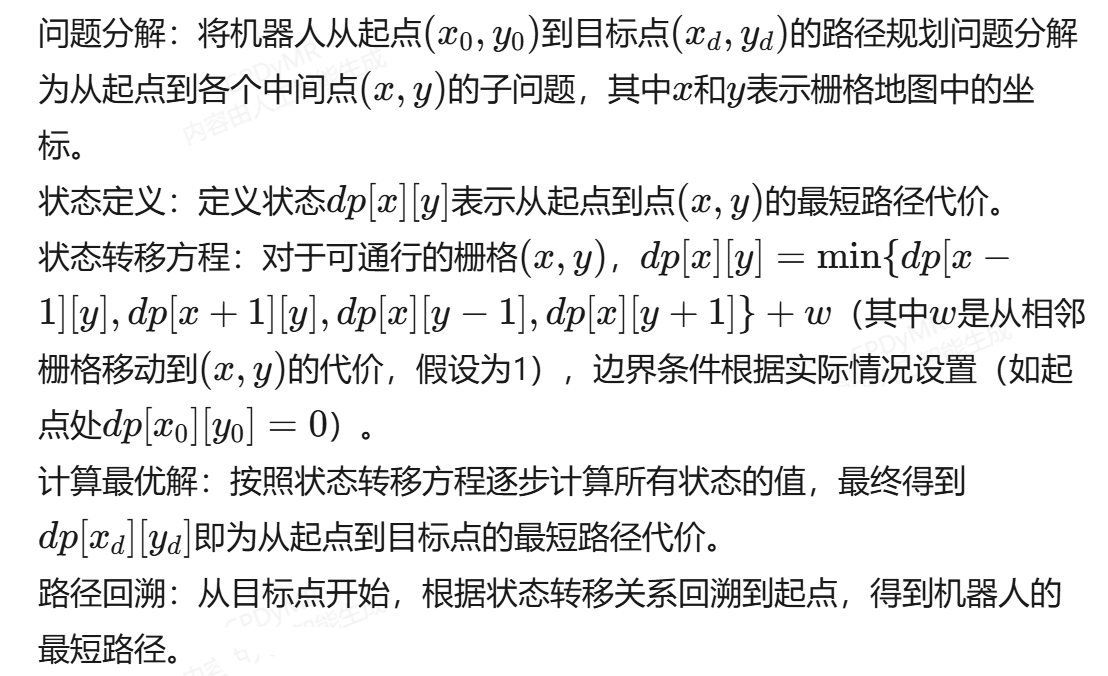
动态规划是一种通过将复杂问题划分为多个子问题,并保存子问题的解来求解原问题的方法。在移动机器人路径规划中,将机器人从起点到目标点的路径规划问题分解为一系列子问题,例如从起点到各个中间节点的路径规划问题。通过求解这些子问题,并利用子问题之间的最优子结构性质(即如果一个问题的最优解包含了其子问题的最优解,则称该问题具有最优子结构性质),可以得到原问题的最优解。具体实现时,通常使用表格或数组来存储子问题的解,避免重复计算。然而,动态规划算法在处理大规模问题时,可能会面临存储空间和计算时间的挑战,因为需要存储和处理大量子问题的解。
三、算法在移动机器人路径规划中的应用
(一)环境建模
为了应用上述算法进行路径规划,首先需要对移动机器人的运动环境进行建模。常见的建模方法包括栅格地图法、几何模型法等。栅格地图法将机器人的运动空间划分为大小相等的栅格,每个栅格表示一个位置状态,通过标记栅格的属性(如可通行、障碍物等)来描述环境。几何模型法则使用几何图形(如多边形、圆形等)来表示障碍物和机器人的形状,通过计算几何关系来规划路径。本文采用栅格地图法进行环境建模,将环境表示为一个二维矩阵,矩阵元素的值表示对应栅格的状态(如0表示可通行,1表示障碍物)。
(二)算法实现流程
- Dijkstra算法实现流程:
- A*算法实现流程
- 动态规划算法实现流程:
四、实验与结果分析
(一)实验环境与参数设置
实验在Matlab环境下进行,采用不同规模和复杂度的栅格地图作为机器人的运动环境。为了便于比较,对三种算法的实验参数进行统一设置,如机器人的移动步长为1个栅格单位,障碍物的分布随机生成。在每种环境下,分别运行Dijkstra算法、A*算法和动态规划算法,记录算法的运行时间、搜索节点数以及规划出的路径长度。
(二)实验结果
- 小规模环境实验结果:在小规模栅格地图(如20×2020×20)中,Dijkstra算法和动态规划算法能够较快地找到最优路径,路径长度较短。A算法的搜索速度也较快,但由于启发式函数的估计误差,在某些情况下找到的路径长度略长于Dijkstra算法和动态规划算法。从运行时间来看,Dijkstra算法和动态规划算法的运行时间相近,A算法相对较快。
- 大规模环境实验结果:随着栅格地图规模的增大(如100×100100×100),Dijkstra算法的计算复杂度显著增加,运行时间急剧增长,搜索节点数也大幅增多。动态规划算法同样面临计算量和存储空间的挑战,运行效率降低。相比之下,A算法凭借启发式函数的引导,能够有效地减少搜索空间,运行时间增长相对缓慢,搜索节点数明显少于Dijkstra算法和动态规划算法。然而,在复杂环境中,由于启发式函数的局限性,A算法找到的路径可能不是全局最优路径。
(三)结果分析
综合实验结果,Dijkstra算法和动态规划算法在小规模、简单环境中能够保证找到最优路径,且精度较高,但计算效率较低。A算法在大规模、复杂环境中具有明显的优势,能够在较短时间内找到近似最优路径,搜索效率高。然而,A算法的性能依赖于启发式函数的设计,若启发式函数不准确,可能导致找到的路径并非全局最优。因此,在实际应用中,需要根据具体的环境特点和任务需求来选择合适的路径规划算法。
五、结论与展望
本文对Dijkstra算法、A算法和动态规划算法在移动机器人路径规划中的应用进行了深入研究。通过对算法原理的分析、实现流程的介绍以及实验结果的对比,明确了三种算法的优缺点和适用场景。在实际应用中,对于小规模、简单环境,Dijkstra算法和动态规划算法可以作为合适的选择;而对于大规模、复杂环境,A算法更具优势。未来的研究方向可以包括改进现有算法的性能,例如设计更精确的启发式函数以提高A*算法的准确性,优化动态规划算法的存储结构和计算流程以降低计算复杂度。此外,结合深度学习等新兴技术,开发更智能、高效的路径规划算法也是一个重要的研究方向。通过不断地探索和创新,有望为移动机器人的路径规划提供更加完善的解决方案,推动移动机器人技术在更多领域的广泛应用。
📚2 运行结果

📝2.1 Dijkstra算法

📝2.2 A*算法

📝2.3 动态规划

部分代码:
function [map, nodelocation]= generate_node(map,nnode)
% merge vertices of all obstacle
obsx=map.pgx{1};
obsy=map.pgy{1};
for i=2:length(map.pgx)
obsx=[obsx NaN map.pgx{i}];
obsy=[obsy NaN map.pgy{i}];
end
map.obsx=obsx;
map.obsy=obsy;
% set nodelocation to all zero
nodelocation=zeros(nnode,2);
% generate nodes
n=1;
while (n<=nnode)
% generate random two number in range of map's border
rx=rand* (map.xrange(2)-map.xrange(1)) + map.xrange(1);
ry=rand* (map.yrange(2)-map.yrange(1)) + map.yrange(1);
state=0;
% if this node is not inside any obstacle
if ~inpolygon(rx,ry,obsx,obsy)
% add this location to nodelocation list
nodelocation(n,1)=rx;
nodelocation(n,2)=ry;
n=n+1;
end
end
hold on;
plot(nodelocation(:,1),nodelocation(:,2),'r*');
hold off;


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









