







车辆动力学模型知识总结(二):运动学模型
参考资料:
车辆运动学自行车模型_肥嘟嘟的左卫门的博客-CSDN博客_车辆自行车模型
翻译: 自动驾驶 一步一步解释基本的2D自行车模型_AI架构师易筋的博客-CSDN博客
总结一下,供自己以后参考。
目录
1. 车辆运动学模型
一般来说,车辆研究模型分为车辆运动学模型和车辆动力学模型,其中车辆运动学模型较为简单。关于两者的区别:运动学模型研究的是物体的位置和姿态,而动力学模型研究的是物体的线速度和角速度。运动学是从几何学的角度研究物体的运动规律,包括物体在空间的位置、速度等随时间而产生的变化。
无论是运动学模型还是动力学模型,介绍之前,都要先介绍自行车模型(或叫单车模型)。
1.1 自行车模型
二维自行车模型可以表示为简化的汽车模型。这是一款经典车型,在正常驾驶条件下能够很好地捕捉车辆运动。
自行车模型把车辆的两个前轮用一个车轮代替,两个后轮也用一个车轮代替,但车辆常常都是前轮转向,所以推导模型中可以假设后轮转向角为0。
可以这样理解运动学模型:正常直线行驶,位置变化等于速度*时间,车辆不是直线行驶时候,已知速度和方向盘转角等,求新的位置。
车辆运动学模型仅适用于低速状态,如自动停车等。
下面介绍一下运动学模型的假设条件:
1 低速形式,忽略轮胎的侧偏特性(即侧偏角为0),前后轮的速度方向就是前后角的转向角方向。
2 只考虑车辆在XOY平面上的运动,即前后,左右,以及绕Z轴的旋转。(也就是说我们描述的车辆是一个二维平面上的运动物体(可以等价与我们是站在天空中的俯视视角)
3. 前面提到的假设两个前轮/后轮各自的转向角一样,所以可以合并为一个轮胎,应用单车模型
4. 车身及悬架系统是刚性的。
1.2 运动学模型
1.21 运动学模型参数
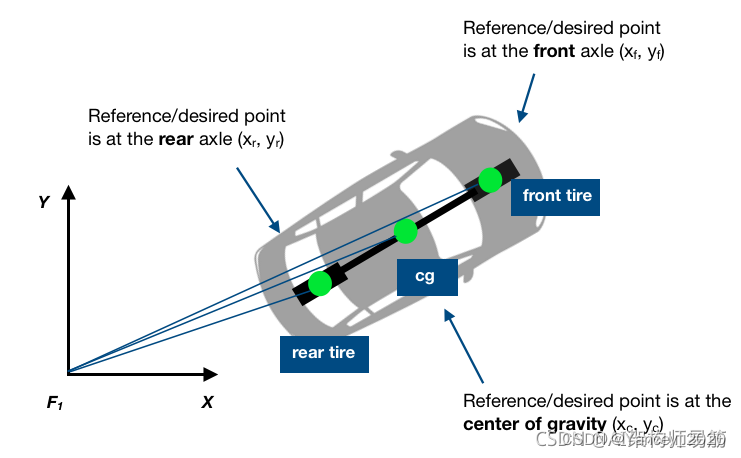
要分析自行车模型的运动学,我们必须在车辆上选择一个参考点,该参考点可以放置在后轴中心、前轴中心或重心或 cg 处。此处选择重心处。其他可参考第3个链接。
下面以前轮转向推导自行车模型的运动学模型,前后轮均有转向的可参考第一个链接或《汽车动力学及控制》。
注意:这里考虑了纵向的加速度a,其实跟书上不考虑a的思路一致,只是最后公式多了一个。
运动学模型整个的控制量可以简化为 (a, δf),其中 a 是车辆的加速度,踩油门踏板意味着正的加速度,踩刹车踏板意味着负的加速度。δf是我们的方向盘转角,我们假定这个方向盘转角就是前轮当前的转角。这样,我们使用两个量描述了车辆的控制输入(control input)。
然后我们定义我们模型中的状态量,运动学自行车模型使用四个状态量来描述车辆的当前状态:(注意:书上是前3个,没有速度)
要求状态量,首先求状态量的变化率,即导数的大小。
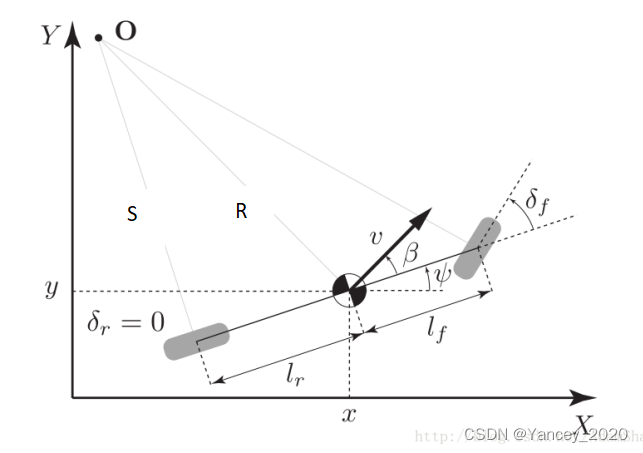
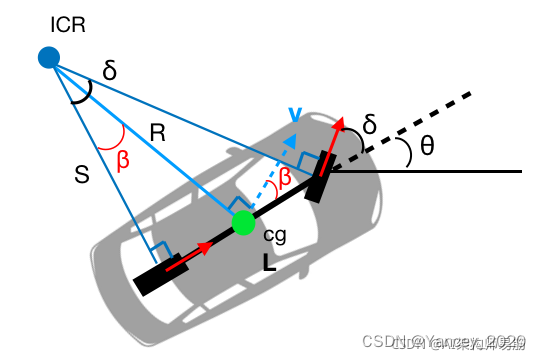
模型如下图所示:
β质心侧偏角(The slip angle)、前轮转角δf、后轮转角δr,是定义在车身坐标系下的;
Ψ车辆的横摆角,是定义在大地坐标系下的;
而车辆的航向角:θ=β+Ψ。
注意:下面这张图仅供参考,公式推导用,其中图中的θ应为Ψ。
1.22 公式推导:
注意下面这里的离散形式一般不用,需要先线性化再离散,具体参考车辆动力学知识总结(五)。 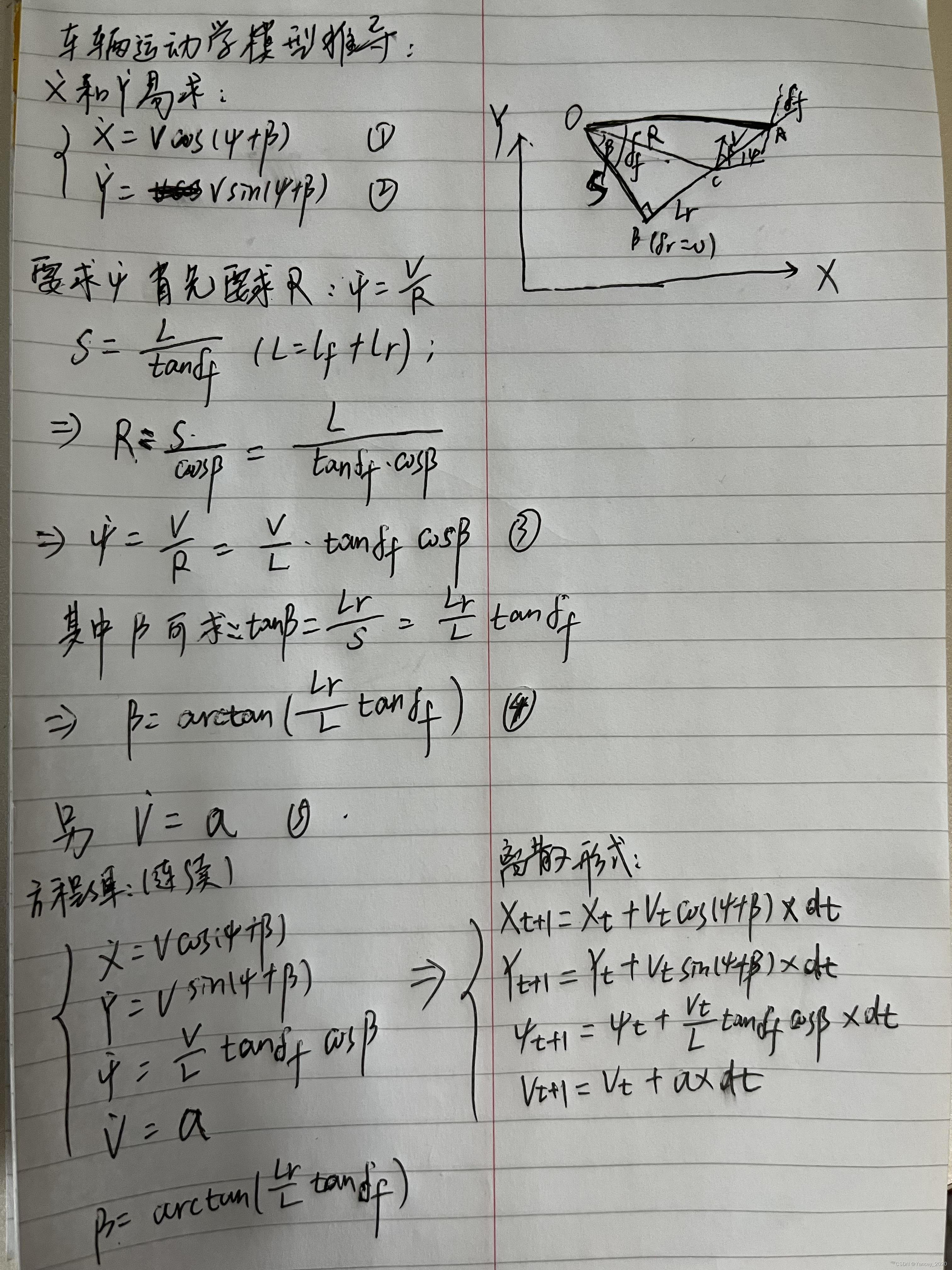
那么基于这个简单的运动学自行车模型,在给定了一个时刻t的控制输入(转向角和加速度)以后,我们可以计算求得 dt 时间以后我们车辆的状态信息(坐标,横摆角以及速度),那么这个模型就可以作为我们模型预测控制下的基础车辆模型了。
备注:有时认为低速状态下,车辆没有(车辆坐标系下的)横向速度分量,然后推导出质心侧偏角β≈0,所以车辆的航向角θ=车辆横摆角φ,cosβ≈1。

















 1805
1805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









