






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨ChaucerG
来源丨集智书童
本文描述了基于nn-UNet试验了几种改进,包括使用更大的网络、用GN替换BN以及在解码器中使用Axial Attention。与Baseline相比,量化指标略有改进。在unseen test data的最终排名中,nn-UNet赢得了第一名的好成绩。
1改进策略
1.1 数据方面
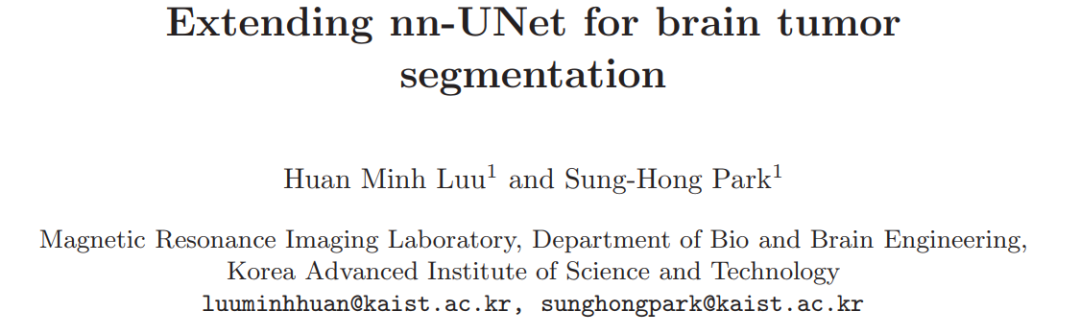
BraTS2021包括了来自2000名患者的多参数MRI扫描结果,其中1251人的图像提供了分割标签给参与者来开发算法,其中219人在验证阶段被用于公共排行榜,其余530个案例用于私人排行榜和参与者的最终排名。
MRI扫描有4种对比:
原生T1加权图像
对比后T1加权(T1GD)
T2加权
T2流体衰减反转恢复(T2-Flair)
注释由1-4个评分员手工完成,最终得到有经验的神经放射学家的批准。这些标签包括gd增强肿瘤(ET)、瘤周水肿/侵袭组织(ED)和坏死肿瘤核心(NCR)区域。所有MRI扫描均通过同解剖模板配准、各向同性1mm3分辨率插值和颅骨剥离进行预处理。所有MRI扫描及相关标记的图像大小为240×240×155。
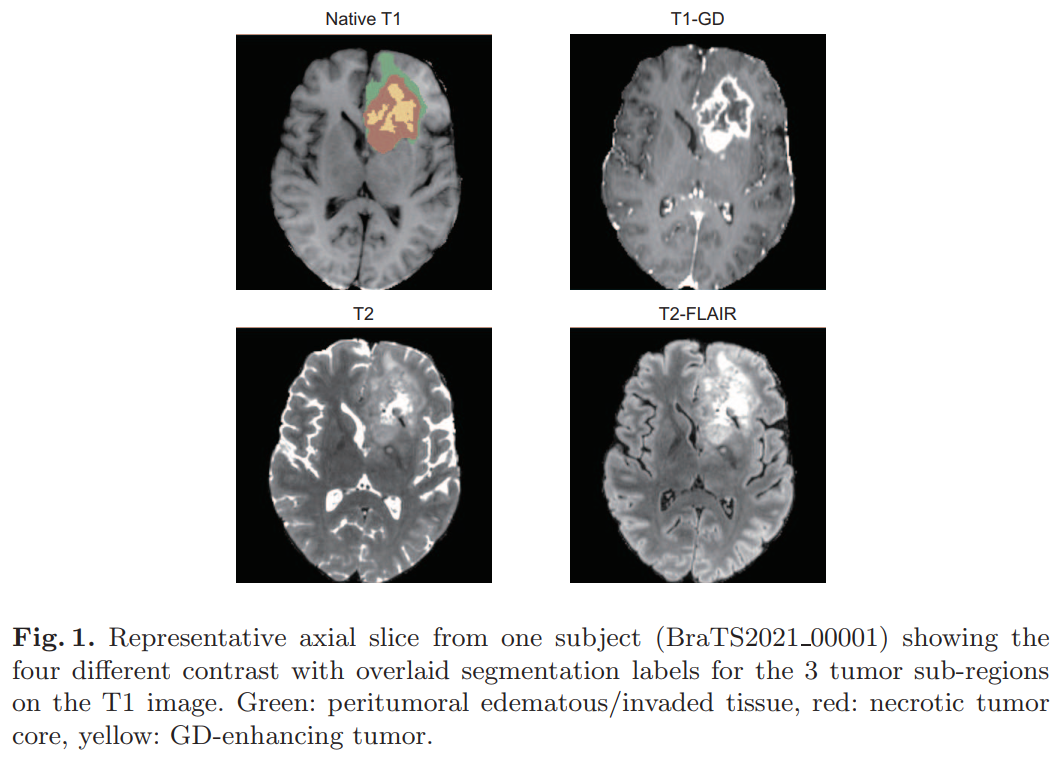
图1显示了这4种对比与分割的代表性切片。在输入网络之前,对提供的数据进行了进一步的处理。为了减少计算量,将volumes裁剪为non-zero voxels。由于MR图像的强度是定性的,因此根据其均值和标准差对voxels进行归一化。
1.2 模型方面
1、Baseline nnU-Net
nnU-Net核心是一个在128×128×128大小的Patch上运行的3D U-Net。该网络具有编码-解码器结构,并带有Skip Connection,将两条路径连接起来。
该编码器由5个相同分辨率的卷积层组成,具有卷积下采样功能。该解码器遵循相同的结构,使用转置卷积上采样和卷积操作在同一级别上的编码器分支的串联Skip特征。每次卷积操作后,采用斜率为0.01的Leaky ReLU(lReLU)和批归一化处理。mpMRI volumes被连接并作为4通道输入。
nnU-Net应用Region-Based训练,而不是预测3个相互排斥的肿瘤子区域,而不是预测3个互斥肿瘤分区,与提供的分割标签一样,该网络预测的是增强肿瘤的3个重叠区域如加强肿瘤(ET,original region),肿瘤核心或TC(ET+necrotic tumor),和整个肿瘤或WT(ET+NT+ED)。
网络的最后一层的softmax被sigmoid所取代,将每个voxels作为一个多类分类问题。
由于公共和私人排行榜的计算指标是基于这些区域的,这种基于区域的训练可以提高表现。额外的sigmoid输出添加到每个分辨率除了2个最低的水平,应用深度监督和改善梯度传播到早期层。卷积滤波器的数量被初始化为32个,并且分辨率每降低一倍,最大可达320个。
2、更大的网络和GN
第一个修改是,通过将编码器中的kernel数量加倍,同时在解码器中保持相同的kernel,非对称地增加了网络的大小。由于训练数据的数量是前一年的4倍,增加网络的容量将有助于它能够建模更大的数据种类。kernel的最大数量也增加到512个,改进后的网络结构如图2所示:
第二个修改是用GN代替所有BN。即使使用混合精度训练,3D卷积网络也需要大量的GPU内存,这限制了在训练中可以使用的Batch-Size。
3、Axial attention解码器
最后添加的是在解码器中使用Axial attention。Self-Attention或Transformer是一个突破性的想法,允许学习一个输入序列的自适应注意力仅仅基于它自己。Self-Attention最初是在自然语言处理中,现在已经慢慢被计算机视觉研究所采用。当试图将Self-Attention应用于视觉问题时,主要的障碍之一是注意力机制的计算复杂度与输入的大小成二次方,这使得它不可能适合或训练网络在一个标准的工作站设置。当处理带有额外维度的3D数据时,这是一个更大的问题。
Axial attention最近被提出作为将注意力应用于多维数据时的一种有效解决方案。通过将Self-Attention独立地应用于输入的每一个轴上,计算只与图像大小成线性比例,使注意力机制即使与3D数据整合成为可能。
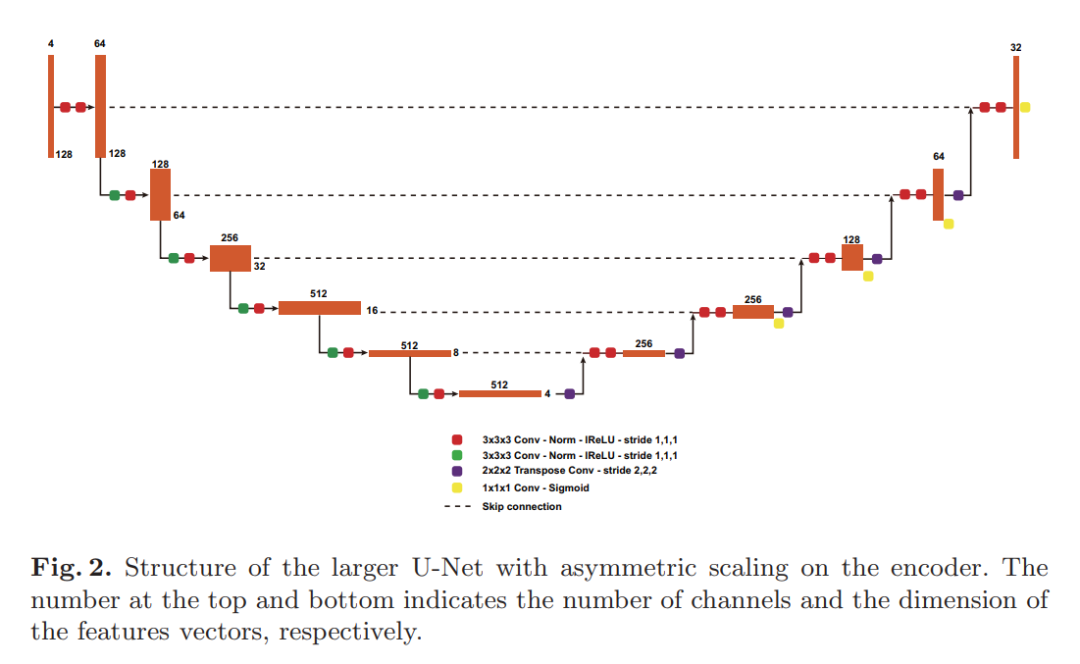
本文将Axial attention应用到网络的解码器上,将其运行在转置卷积上采样的输出上,然后将它们相加。
显示了Axial attention解码器块的示意图。即使有了更有效的注意力,作者发现这种方法也不可能应用于最高分辨率的特征(128×128×128),因此只选择了4个较低分辨率的特征。注意力头的数量和每个头的尺寸随着分辨率的降低而增加一倍,分别从4和16(64×64×64分辨率)开始。
1.3 训练策略
这里遵循nnU-Net训练方法。每个网络都接受了5倍交叉验证的训练。在训练过程中,动态地应用数据增强来提高泛化能力。数据增强包括随机旋转和缩放、弹性变形、附加亮度增强和伽玛缩放。
优化的目标是binary entropy loss和Dice loss的总和,计算在最终的全分辨率输出以及在低分辨率的辅助输出。使用Batch Dice loss代替sample Dice loss,将整个批次作为一个样本来计算损失,而不是平均每个样本在小批中的Dice。批量Dice帮助稳定训练通过减少来自样本的错误,少量的注释样本。网络采用Nesterov动量为0.99的随机梯度下降法进行优化。初始学习率为0.01,并按照多项式计划衰减:
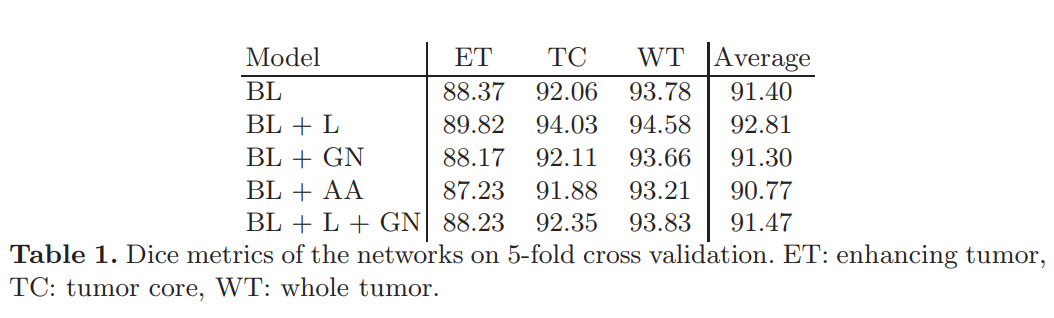
每次训练运行持续1000个epoch,每个epoch包含250个小批量。当前折叠验证集上的Dice Score用于监视训练进度。所有实验都是在24GB VRAM的NVIDIA RTX 3090 GPU上使用Pytorch 1.9进行的。开发了以下模型:
BL:Baseline nnUNet
BL+L:Baseline with Large nnUNet
BL+GN:Baseline with Group Normalization
BL+AA:Baseline with axial attention, batch normalization
BL+L+GN:nnUNet with larger Unet, group normalization
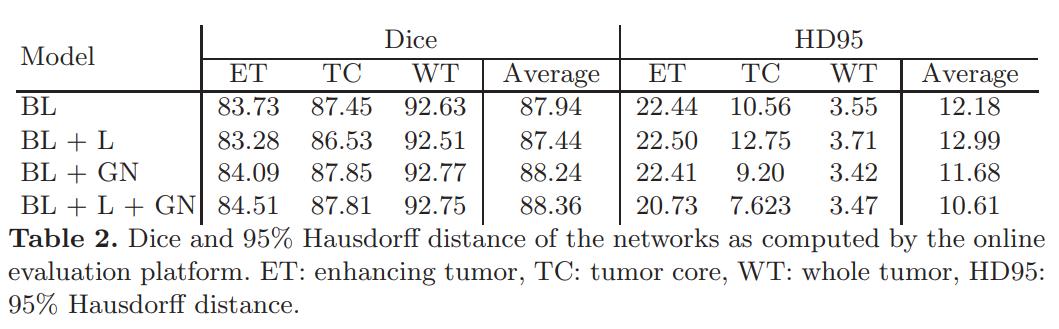
2比赛结果
3参考阅读
[1].Extending nn-UNet for brain tumor segmentation
本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程推荐:
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

















 3979
3979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









