






装载机广泛应用于公路、铁路、建筑等领域,用于土壤、砂石等散状物料的装卸和运输。为提升生产质量及效率,许多工程机械企业依托智能化、自动化技术,建立了先进的装载机生产制造平台。
以某大型工程机械企业装载机制造基地为例,该企业引入了梅卡曼德3D视觉,用于对装载机车架两侧翼板上的螺栓进行高精度定位,引导桁架机器人进行螺栓拧紧,完成装载机驱动桥和车架精准装配。通过这一创新,该企业装配线生产质量及效率得到双重提升,实现自动化、柔性化生产。
改造原因


装载机(图片源自网络)
客户出于以下原因,计划通过3D视觉和桁架机器人来完成螺栓拧紧,以连接装载机驱动桥和车架侧翼。
提升效率:单个车架涉及十余个螺栓,人工拧紧效率有限,3D视觉+桁架机器人能够快速准确地完成螺栓拧紧。
提升精确性:螺栓与螺母从两端对顶拧紧,3D视觉可对螺栓中心点高精度定位,避免由于螺栓未正确拧紧而导致的装配不稳定或故障。
提升一致性:3D视觉引导桁架机器人更具精准性和稳定性,以一致的力度和拧紧扭矩完成螺栓连接。消除了人为因素的影响,确保每个螺栓都被均匀、正确地拧紧。
提升柔性:示教法需对来料车架用工装进行固定,工装设计及维护成本高,无法适应产品换型生产。
解决方案

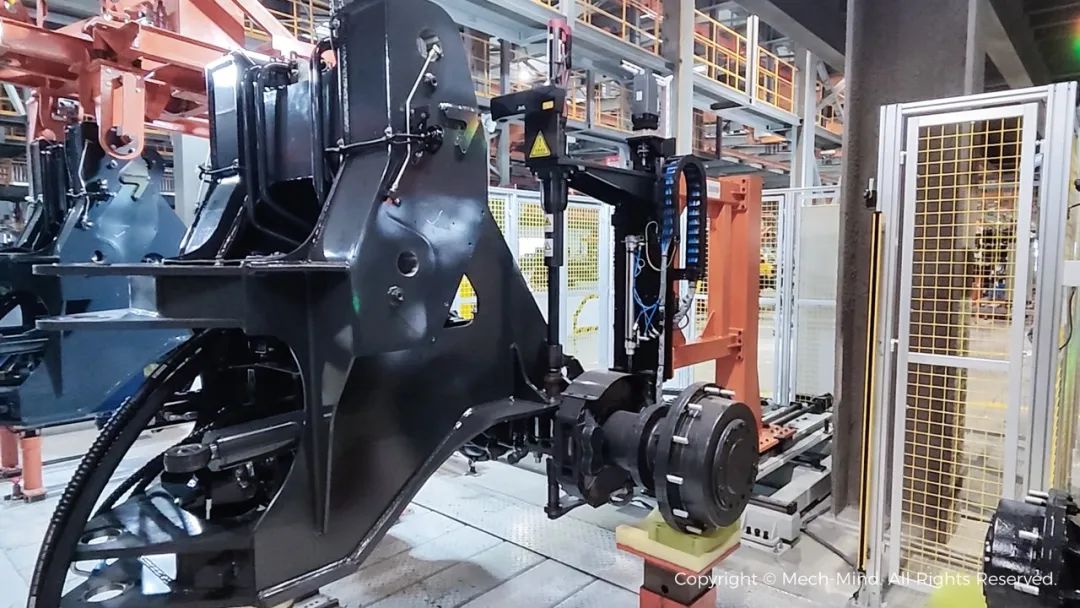
项目现场
3D视觉系统构成:Mech-Eye PRO M工业级3D相机、Mech-Vision机器视觉软件。
3D视觉系统功能:对当前到位车架及螺栓进行识别定位。
3D相机安装方式:臂载式安装。
通讯方式:3D视觉系统与PLC通过Snap7进行通讯和数据交互。
工作流程:
螺栓车架上处于预拧紧状态,车架由AGV运输到位。
PLC系统收到信号,告知3D视觉系统车架型号及对应螺栓型号,触发3D相机拍照。3D视觉系统识别定位车架位置,并发送给PLC系统,PLC系统根据车架位置计算真实相机拍照点。
桁架机器人携带3D相机移动到车架一侧指定拍照点,3D相机拍照,视觉系统获取车架一侧螺栓的位姿信息,引导机器人完成螺栓拧紧。而后完成另一侧螺栓拧紧。
两侧螺栓均完成拧紧后,上报完成信号,开始下一工作循环。
解决方案

定位精度高,大幅提升拧紧质量
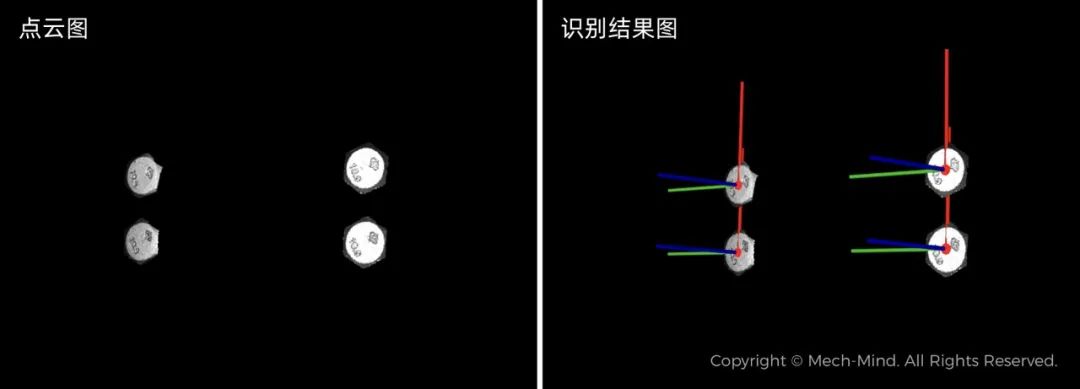
不同车架单侧冀板对应螺栓
Mech-Eye PRO M@1.3m
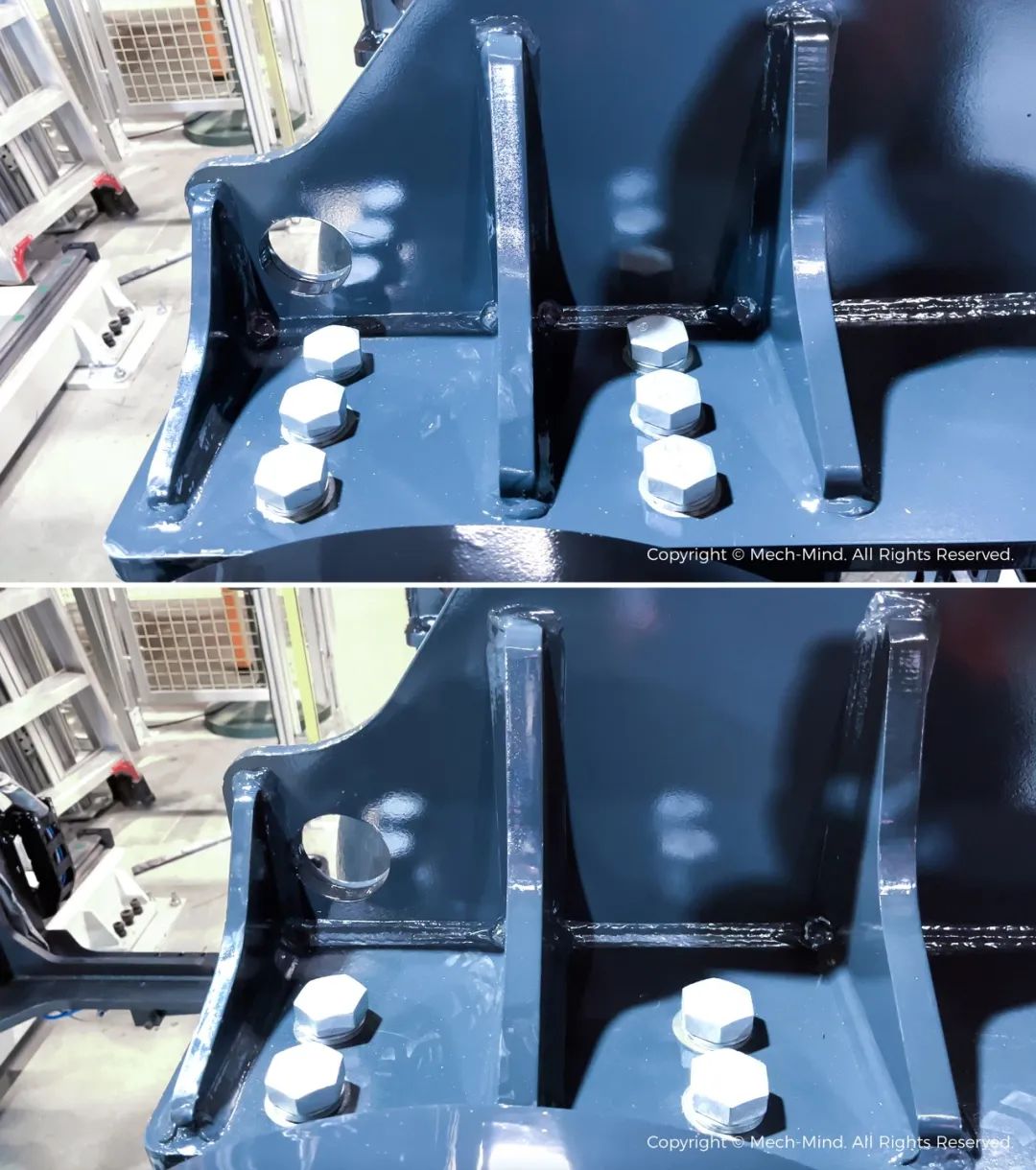
对螺栓中心点高精度定位,保证拧紧枪上下轴对准,以施加完整拧紧扭矩。实现了螺栓与螺母的精准对顶拧紧,双向传递压力至旋合螺纹,保证拧紧稳定可靠。
智能映射算法,无需一拍一定位。一次拍照即可实现对单侧冀板全部螺栓的高精度定位,引导机器人按序完成拧紧。拧紧效率大幅提高。
车架到位误差较大,相机拍照点需根据车架位置调整,保证相机视野完整覆盖待拧紧螺栓。3D视觉系统可通过局部特征定位来料车架,以此计算不同来料对应相机拍照点。
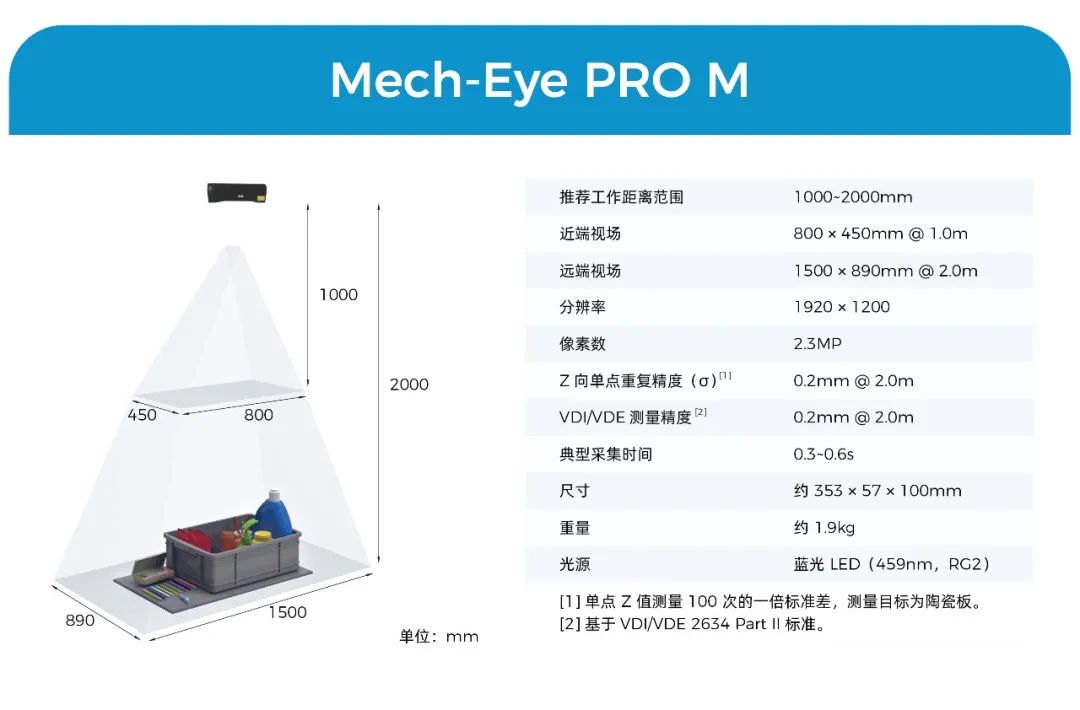
Mech-Eye PRO M核心参数
现场采用了高精度结构光3D相机Mech-Eye PRO M,该相机采用了先进的光学器件,可满足现场毫米级定位精度要求。能够对现场存在较强环境光干扰的情况下,对表面反光、带有划痕、油污的螺栓生成边缘清晰、细节完整的高质量点云。
高性能3D视觉系统,实现智能化、柔性化生产
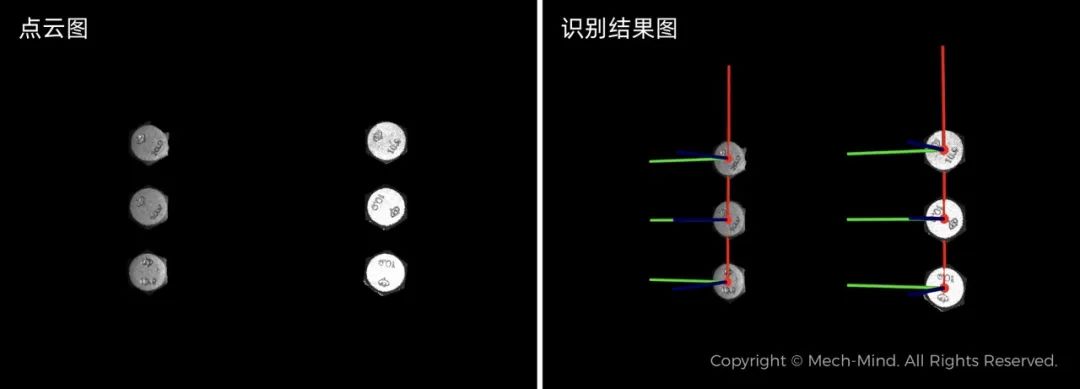
不同车架侧冀板
现场为多机型共线生产模式,来料车架有数十种,每种车架螺栓型号、位置、数量皆不相同。3D视觉系统可提前预设匹配模板,以适应各类装载机,并支持新增产品快速导入。
通过众多实际应用积累了丰富的标定经验,在现场复杂工况下,可快速完成3D相机与桁架机器人标定。
自主开发标准通讯接口,支持3D视觉系统与使用TCP/IP、Snap7等主流通讯协议的机器人进行通讯。客户无需进行通讯程序开发,即可满足实际现场通讯需求。
现场为紧凑型流水线布局,通过3D视觉对车架、螺栓定位,避免桁架与工件及其他设备发生碰撞,空间利用率更高。
连续稳定作业,保证产能需求
拧紧细节
通过3D视觉引导桁架机器人完成重复性拧紧作业,可根据生产计划24小时连续作业,精度、节拍、工艺执行均满足生产需求。
梅卡曼德3D视觉软件性能强大、易用性强、工业设备扩展性好。合作伙伴可快速将3D视觉系统与桁架机器人、拧紧枪等设备集成部署,助力终端客户稳定生产。
梅卡曼德可为合作伙伴提供功能强大、价格合理、简单易用、开放可拓展的智能机器人基础设施产品,及人员培训、参考方案设计、展会支持、重难点项目攻关等服务,全力协助合作伙伴快速落地各类复杂机器人应用。
梅卡曼德目前已经实现了轮胎随行装配、螺栓拧紧、汽车自动充电、电池模组上料装配等精细化作业场景的规模化交付,产品性能及稳定性经过众多大型项目终端验证。如果您想了解更多3D视觉方案,请点击“阅读原文”或发送邮件至info@mech-mind.net。
欢迎加入梅卡曼德

计算机视觉算法专家 (工作地点:北京)
岗位职责:
1.负责结构光3D相机的研发,提升重建效果,尤其是物体边缘准确性,光线等各种干扰条件下的准确完整重建;
2.侧重原理和算法方面的研发验证,能将理论转化成解决实际关键问题的方案和产品;
3.对代码和算法库进行更新维护,对实验数据、研发过程和预研成果的资料整理、总结,积极跨部门协作推进预研成果的产品化工作。
任职资格:
1.硕士及以上学历,5年以上专业经验,具备扎实的编程基础和代码规范;
2.拥有多视几何、立体重建、双目匹配、图像处理方面的理论和实践功底;
3.有计算机视觉相关研究经验,在三维重建领域有独创贡献;
4.熟悉视差图、深度图的前处理,后处理方案;实现高效准确三维重建,假点去除,孔洞填充,保边平滑,多目融合;
5.有结构光双目匹配算法研发和优化经验者优先;
6.有解决物体边缘双目匹配失真、光照干扰和遮挡导致误匹配相关经验者优先。
视觉算法专家(精度)/ 摄影测量算法专家 (工作地点:北京)
岗位职责:
1. 负责高精度视觉测量仪器(绝对精度:近距离小视野微米级别,远距离大视野亚毫米级别)研发,提升产品精度,解决视觉测量仪器使用中的漂移问题;
2. 侧重原理和算法方面的研发验证,能将理论转化成解决实际关键问题的方案和产品;
3. 积极跨部门协作,和光学、结构、机器人工程师合作提升产品的整体精度和效果;与工艺质量部门协作输出生产装配测试的标准流程。
任职资格:
1. 硕士及以上学历,5年以上专业经验;
2. 有扎实的多视几何、摄影测量、优化问题方面的理论和实践功底;
3. 有高精度测量仪器研发经验,熟悉高精度标定和重建方法;
4. 熟悉各种精度漂移问题和对应解决方案;
5. 对机械、温度等对精度产生漂移的机制和补偿手段有相关经验者优先;
6. 有优化镜头畸变、像差、装配工艺等对精度影响相关经验者优先。
投递通道:
邮箱投递:hr@mech-mind.net
电话/微信联系:13810095997 高先生
想了解更多公司详情可访问官网:
https://www.mech-mind.com.cn/























 1141
1141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









