






 文章讨论了利用3D视觉在2D地图上的有限范围重定位方法,特别关注LaLaLoc系列工作,包括隐式布局表示的LalaLoc和显式3D建模的LaLaLoc++。这些技术通过学习RGB图像和平面图间的共享隐空间,实现了在未访问环境中的低成本定位,适用于扫地机器人等设备。
文章讨论了利用3D视觉在2D地图上的有限范围重定位方法,特别关注LaLaLoc系列工作,包括隐式布局表示的LalaLoc和显式3D建模的LaLaLoc++。这些技术通过学习RGB图像和平面图间的共享隐空间,实现了在未访问环境中的低成本定位,适用于扫地机器人等设备。
这是近日我们《3D视觉从入门到精通》知识星球的一位小伙伴提出的问题:“通过视觉在2D地图(地图上有墙、门等信息)上进行有限范围内的重定位,有没有比较成熟的方法?”
在回答中,我们星球的嘉宾以及大佬给出了自己的一些想法。
然后,结合我之前看到过的一个系列工作,这里我想再扩展延申一下。
这是之前研究过的一篇文章,也是一个系列工作。即在未访问环境下,通过房间布局平面图进行定位。
论文:LaLaLoc: Latent Layout Localisation in Dynamic, Unvisited Environments(ICCV 2021)
LaLaLoc++: Global Floor Plan Comprehension for Layout Localisation in Unvisited Environments (ECCV 2022)
项目地址:https://github.com/ActiveVisionLab/LaLaLoc
首先是第一个LalaLoc,它通过房间布局的隐式表达来进行定位,方法是通过网络学习从RGB全景图像和已知的平面图推断的布局之间共享的一个隐空间,在隐空间中引入直接的跨模态姿态优化。
然后是LalaLoc++,相比于LaLaLoc,这是其改进版,LaLaLoc要求首先使用平面来构造场景的显式三维表示,这个过程要求对场景几何体进行假设,而LaLaLoc++引入了一个全局平面图理解模块,该模块能够直接从2D平面图中密集推断场景结构,消除了对显式建模或者渲染的需求。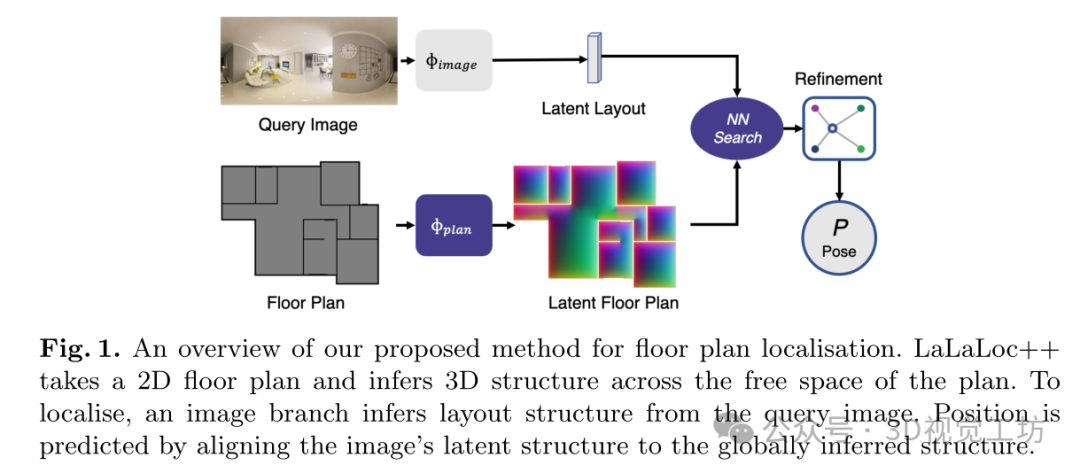
感兴趣的读者可以下载两篇文章研究一下,他们提供了一种在未访问环境下通过房间布局平面图进行定位的方式,通过仅视觉的解决方案,成本更低,而且房间布局平面图这一地图形式所占的存储量也很小,其方案很适合部署在扫地机器人上面。
最后,上述讨论以及相关文章分享解读都可以在我们的星球中找到!下面是我们的星球二维码,欢迎大家扫码加入!!!


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









