






来源:雨飞工作室
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

一、无人机的控制算法是无人机技术与自动控制理论的结合,是实现无人机稳定、精确飞行的关键。当前,无人机控制算法主要有PID控制、LQR控制、滑模控制、自适应控制等。
1.PID控制
PID控制算法是无人机控制算法中是最为基础和常用的一种闭环反馈控制算法。近年来,PID控制算法得到了改进和优化,例如结合神经网络的PID控制算法、基于动态控制和非线性优化的PID控制算法等,这些改进和优化的PID控制算法在提高控制难度和应对变化的环境因素方面取得了显著的成果。
2.LQR控制
线性二次型调节控制(LQR)是一种基于状态反馈的优化控制算法:通过对系统动态特性的描述,设计出具有良好控制性能的控制器;其优点在于可以根据实际情况进行调整,从而更加准确地描述无人机系统的动态特性;同时设计模型简单、易于理解,且可以自适应调整参数,以应对不同的工作场景和环境因素。LQR控制算法在控制精度和稳定性方面表现非常优秀,但其对线性模型和系统的依赖较强,无法完全处理非线性、不确定性、时变等问题。
利用MATLAB等软件工具,可以通过调用lqr函数来求解出最优增益矩阵K。例如,在MATLAB中,给定系统矩阵A和B,以及权重矩阵Q和R,可以直接使用以下命令计算K:[K, S, E] = lqr(A, B, Q, R);这里,S表示Riccati方程的解,而E则包含了闭环系统的极点位置。
在实际操作中,LQR已被成功应用于无人机的姿态控制;此外,结合扩展状态观测器(ESO),还可以进一步提高控制系统的鲁棒性和抗干扰能力。不仅如此,LQR还被证明对于轨迹跟踪问题也非常有效。
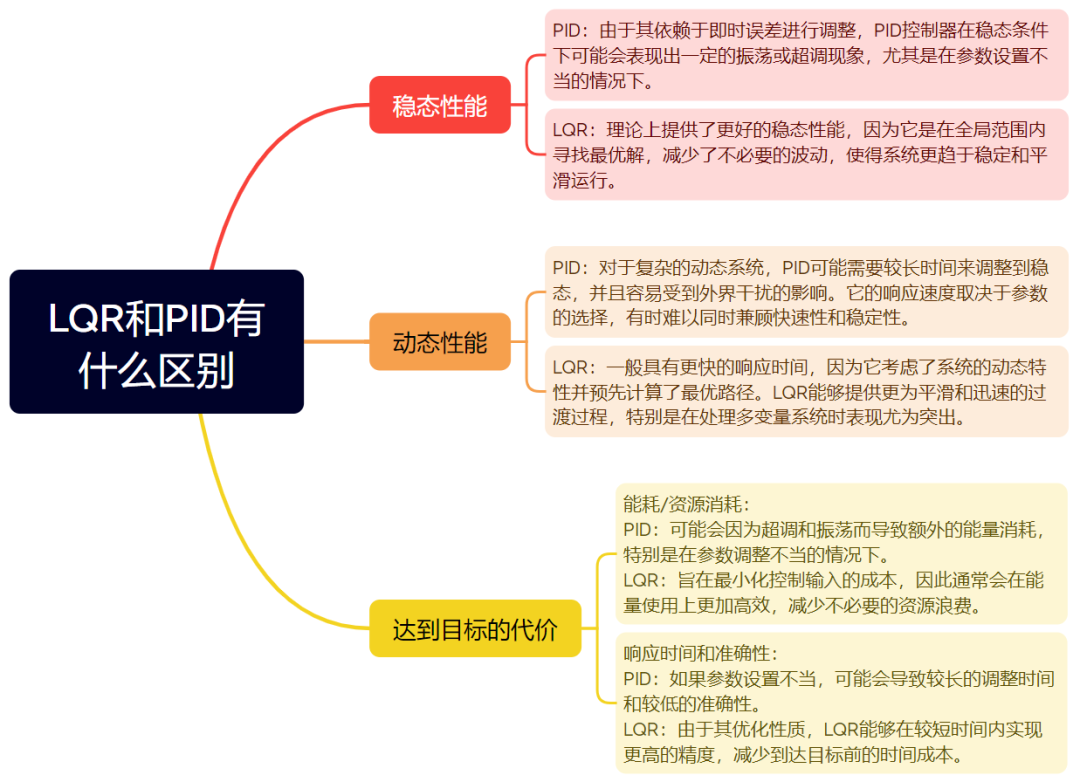
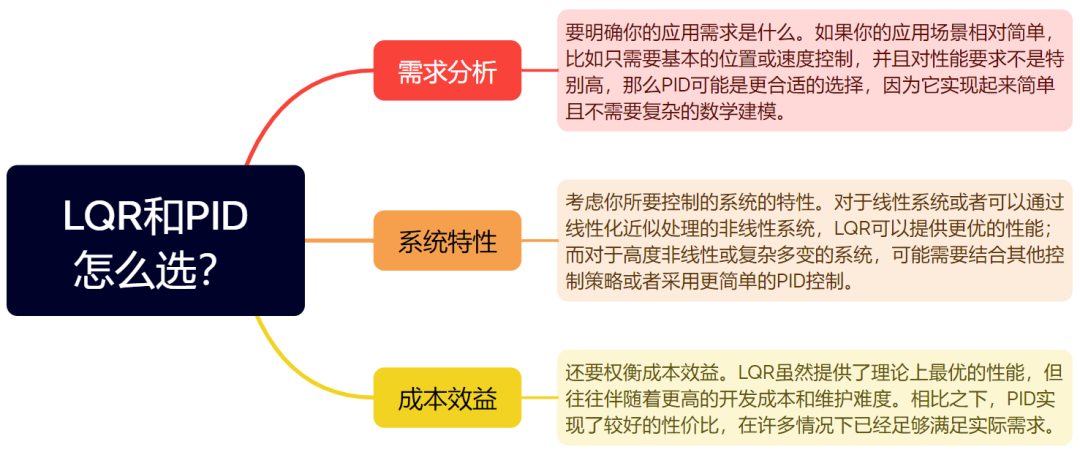
选择PID还是LQR并不是一成不变的规则,而是取决于具体的应用背景和个人偏好。有时候,两者也可以结合使用,以发挥各自的优势:如在外环使用PID进行粗略控制,在内环使用LQR进行精细调节。
3.滑模控制
滑模控制(SMC)是一种基于滑模面、滑动模式和控制律的非线性控制算法,已广泛应用于无人机控制领域。SMC算法的核心思想是通过将系统状态变量映射到滑动模式上,从而实现对系统的控制。滑动模式是一种非常短时间内产生的连续状态,因此可以有效地消除系统中的干扰和噪声。SMC算法具有很好的鲁棒性和适应性,可以有效地应对外界干扰以及非线性、不确定性等带来的影响;且设计也比较简单,易于实现。但在实际应用中,SMC算法会出现超调和振荡等问题。
4.自适应控制
自适应控制算法是指根据系统内部反馈,自动调整系统参数的一种控制算法,可以根据实际情况自适应调整控制器的增益和参数值,以实现更好的控制效果,在应对非线性、不确定性等方面具有很强的能力。自适应控制算法在无人机控制领域中的应用主要包括基于模型参考自适应控制(MRAC)和自适应后滤波控制(AFC)等,具有很好的适应性和鲁棒性。但是,自适应控制算法对系统参数的变化误差比较敏感,在参数的选择上需要注意平衡控制效果和稳定性。

二、很low很完美的PID
通常学术界认为某一个方法很low,表示这个方法已经非常成熟,基本没什么可以进一步提高的学术空间了,在这方面继续研究投入已经无法产生有意义的创新成果了。所以,PID是非常成功的方法,虽然简单机械,但是非常可靠稳定,反应灵敏,抗扰能力强,实施成本低。包括自动驾驶,很多号称AI的领域,目前的控制实施部分,依然是PID;AI在实时运动控制中,仅仅工作在感知层面。这也从另一个方面说明,PID确实有些 “low”,连那些搞AI的大拿们,也想不出任何升级PID的办法!
三、鲁棒性,堪称翻译之耻!
数学与统计学中,有很多概念都翻译的非常好,比如积分、方差、似然值、最小二乘法等,无论是读起来,还是字面意思,都很容易理解,也很上口。但也有翻译得非常差的,最为典型的就是鲁棒性。把Robustness翻译为稳健性,稳固性,不都很好么?为何学术上非要叫它鲁棒性?每次看到鲁棒性这个词,都感到很分裂。 所以,鲁棒性堪称翻译之耻!
四、EKF点滴
1.EKF是一种迭代的数学方程,当测量值包含可预测、不可预测或随机的、不确定性变化时,使用一组方程,通过连续的的数据输入,快速估算出真实值,如估算位置、速度等。输入的值不是真实值,只是在真实值的附近某个位置,具有不确定性。
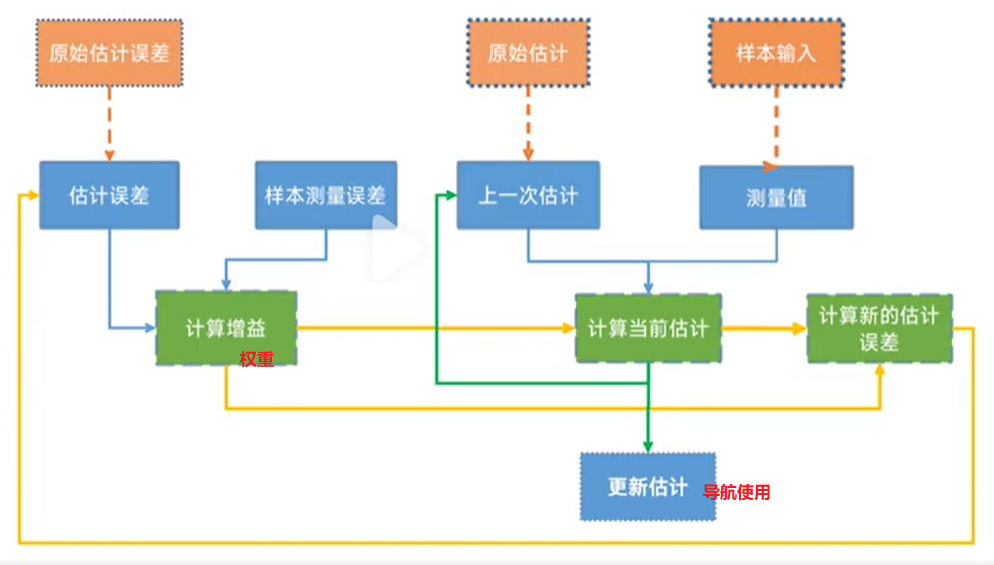
EKF流程图
2.为什么选择EKF?比如现在有1000个样本点,我们通常的做法是统一收集他们并求求取平均值,我们认为平均值是最接近真实值的。需要大量的输入才可以计算出比较接近真实值的估计。但是EKF不需要大量的输入,就可以快速的估计出最有值,EKF通过获取其中一些样本并估计数据的变化规律与不确定性来估算真实数据。
3.EKF估计更快,通过初始化,我们在估计中去预测误差和不确定性的量值,随着EKF不断的选代,最终缩小到真实值附近,并且样本量不需要很大,但当样本选代的越来越多,估计误差会越来越小,估计值将越来越接近真实值。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉硬件
3D视觉学习圈子
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

3D视觉全栈学习课程:www.3dcver.com

3D视觉交流群成立啦
 点这里👇关注我,记得标星哦~
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~


















 1930
1930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









