






 本文介绍了一种结合DWA和RRT*算法的路径规划方法,强调了其在自定义地图和性能上的优势。实验结果表明,该算法在路径规划效果、计算速度和代码稳定性上优于其他传统算法。
本文介绍了一种结合DWA和RRT*算法的路径规划方法,强调了其在自定义地图和性能上的优势。实验结果表明,该算法在路径规划效果、计算速度和代码稳定性上优于其他传统算法。
DWA算法与RRT*融合算法,。
还有单独dwa,单独A*,RRT,RRT*(2 3d地图)等路径规划算法,可自定义地图。
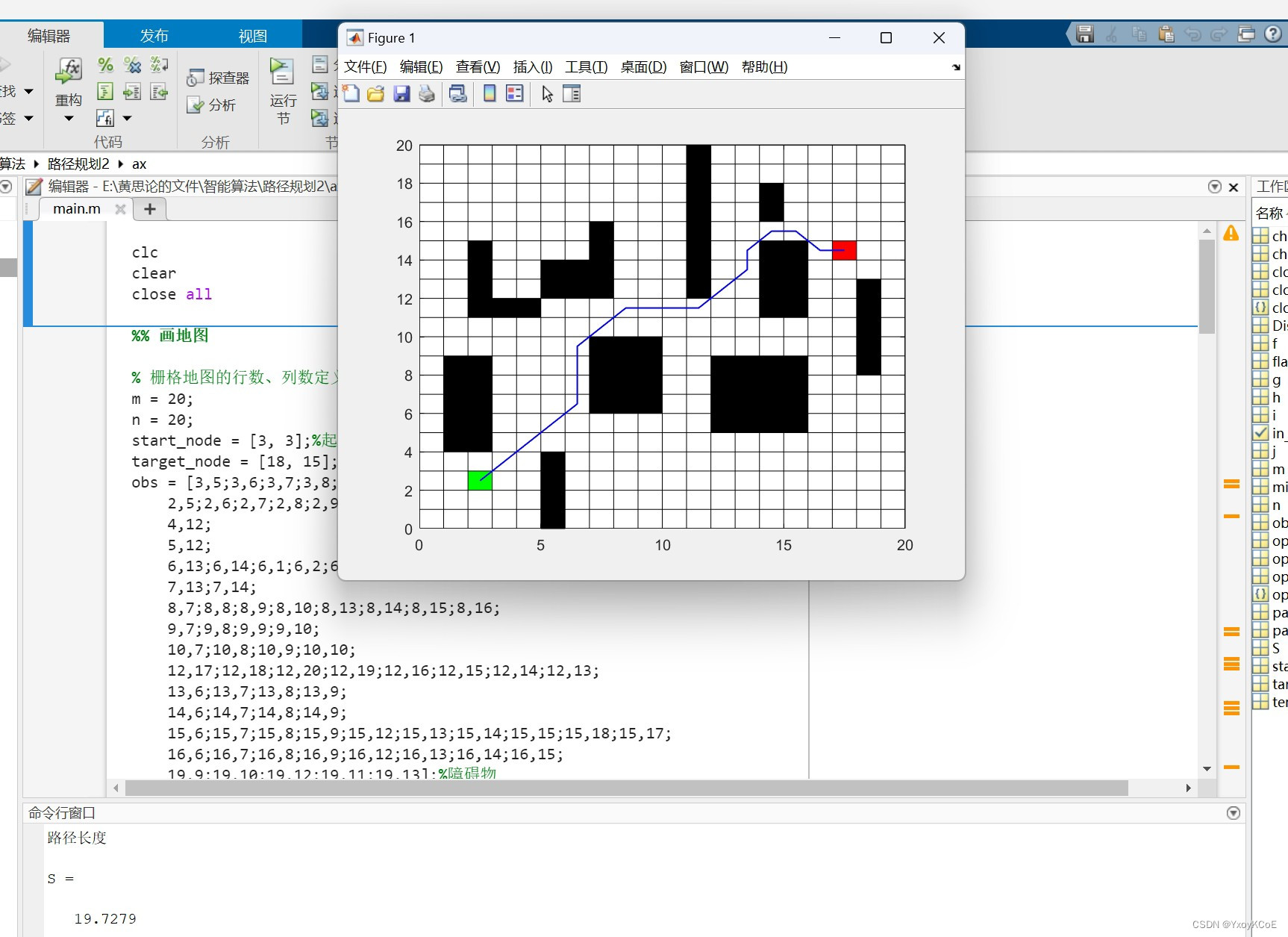
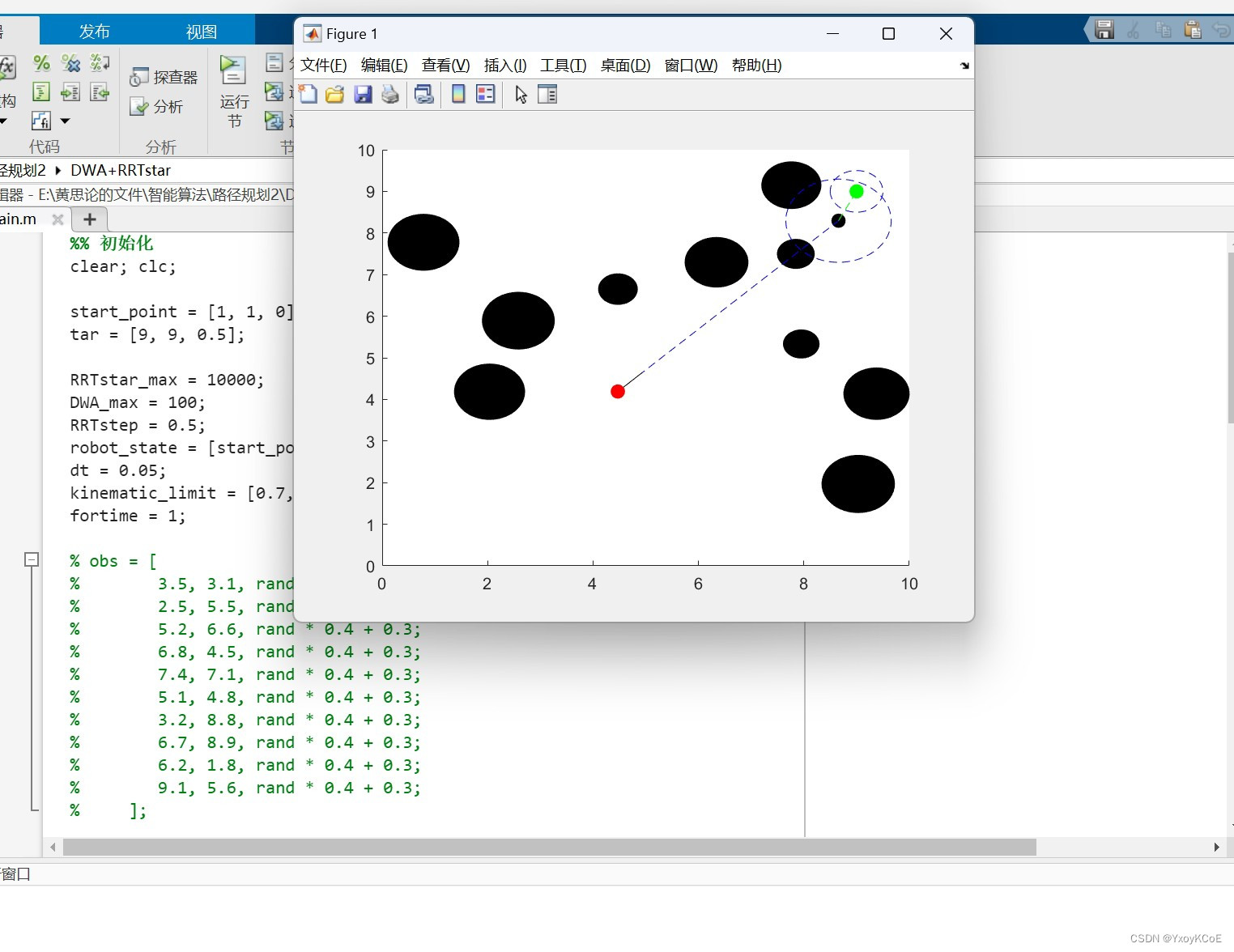
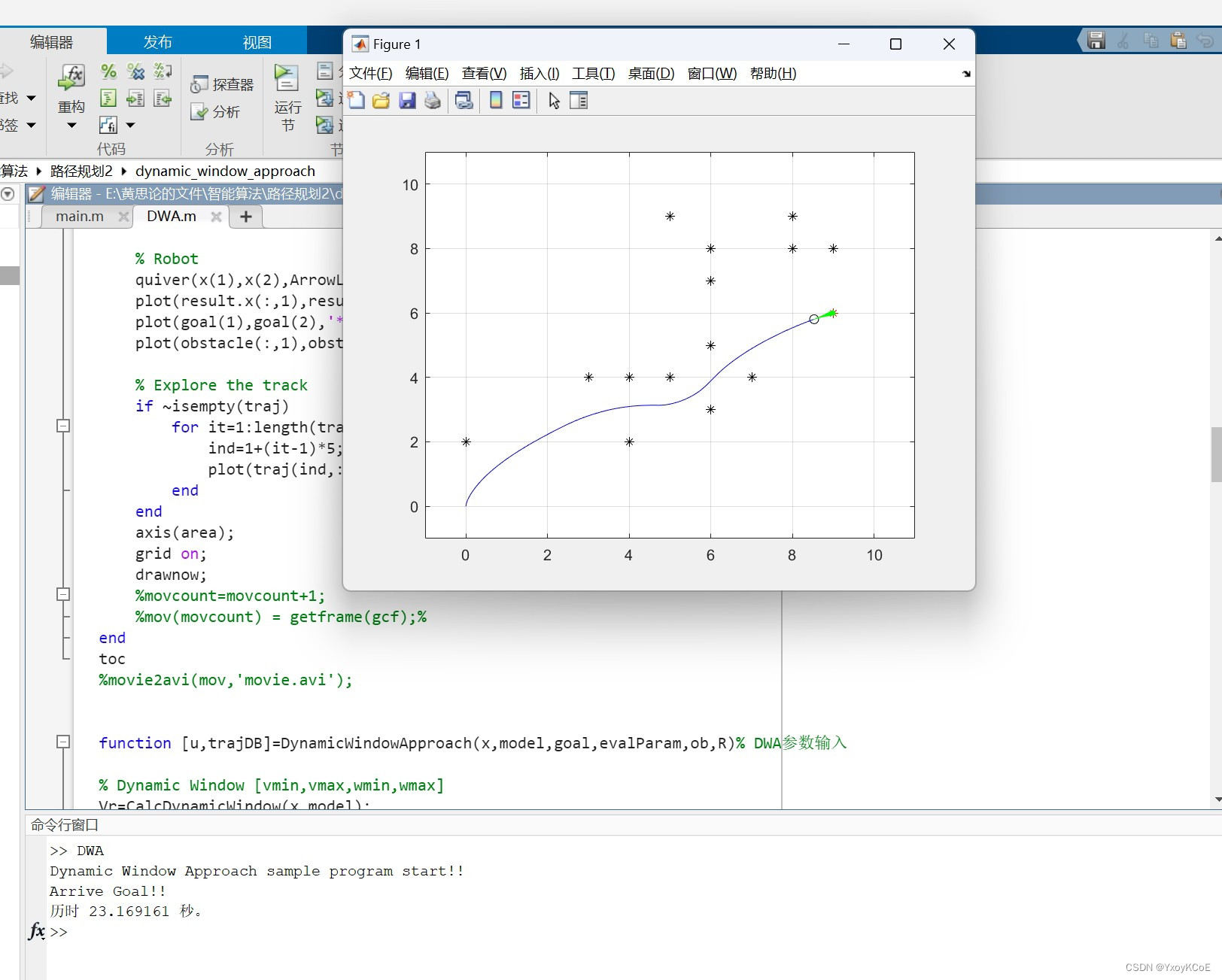
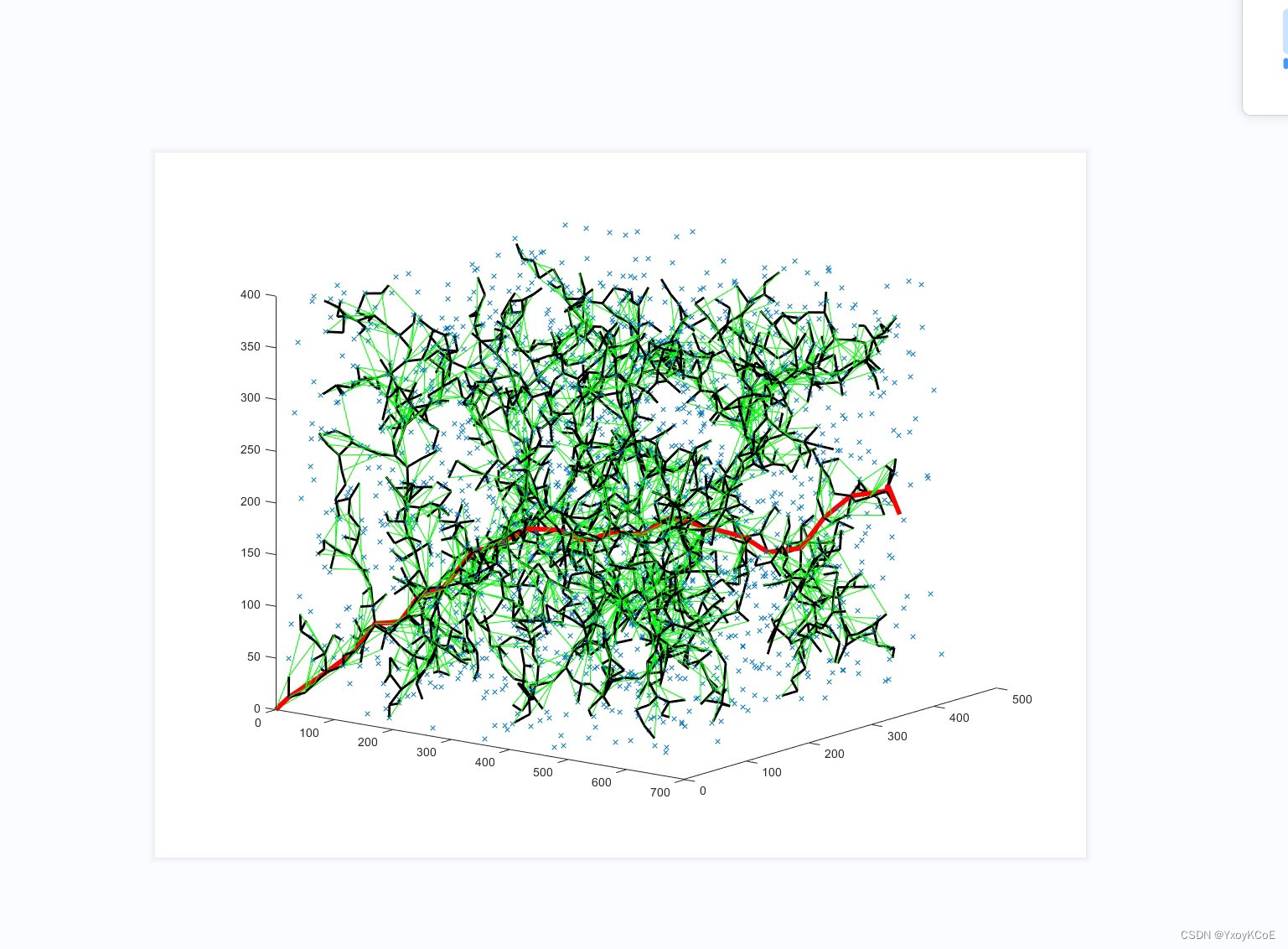
运行效果如图所示
标题:路径规划的研究与应用——DWA算法与RRT*融合算法
摘要:路径规划作为自动控制系统中的关键问题之一,一直以来都受到广泛关注。本文提出了一种基于DWA算法与RRT*融合的路径规划算法,该算法不仅能够高效地规划路径,还可以根据实际需求自定义地图。通过实验验证,本文所提算法在运行效果和代码稳定性方面表现出色,确保了无运行问题和不支持退款的承诺。
1. 引言
路径规划是自动控制系统中的重要研究方向之一。在机器人、自动驾驶等领域,路径规划的准确性和高效性直接影响整个系统的性能和稳定性。目前,研究人员提出了许多路径规划算法,其中DWA算法和RRT*算法是常见且有效的方法。本文旨在通过将DWA算法与RRT*算法融合,提出一种更高效、更具实用性的路径规划算法。
2. DWA算法与RRT*融合算法的原理
2.1 DWA算法
DWA算法(Dynamic Window Approach)是一种基于动态窗口的路径规划算法。该算法通过建立速度空间和激光雷达扫描信息,综合考虑机器人当前状态和目标状态,确定安全速度和运动方向。DWA算法具有实时性强、适应性好等特点。
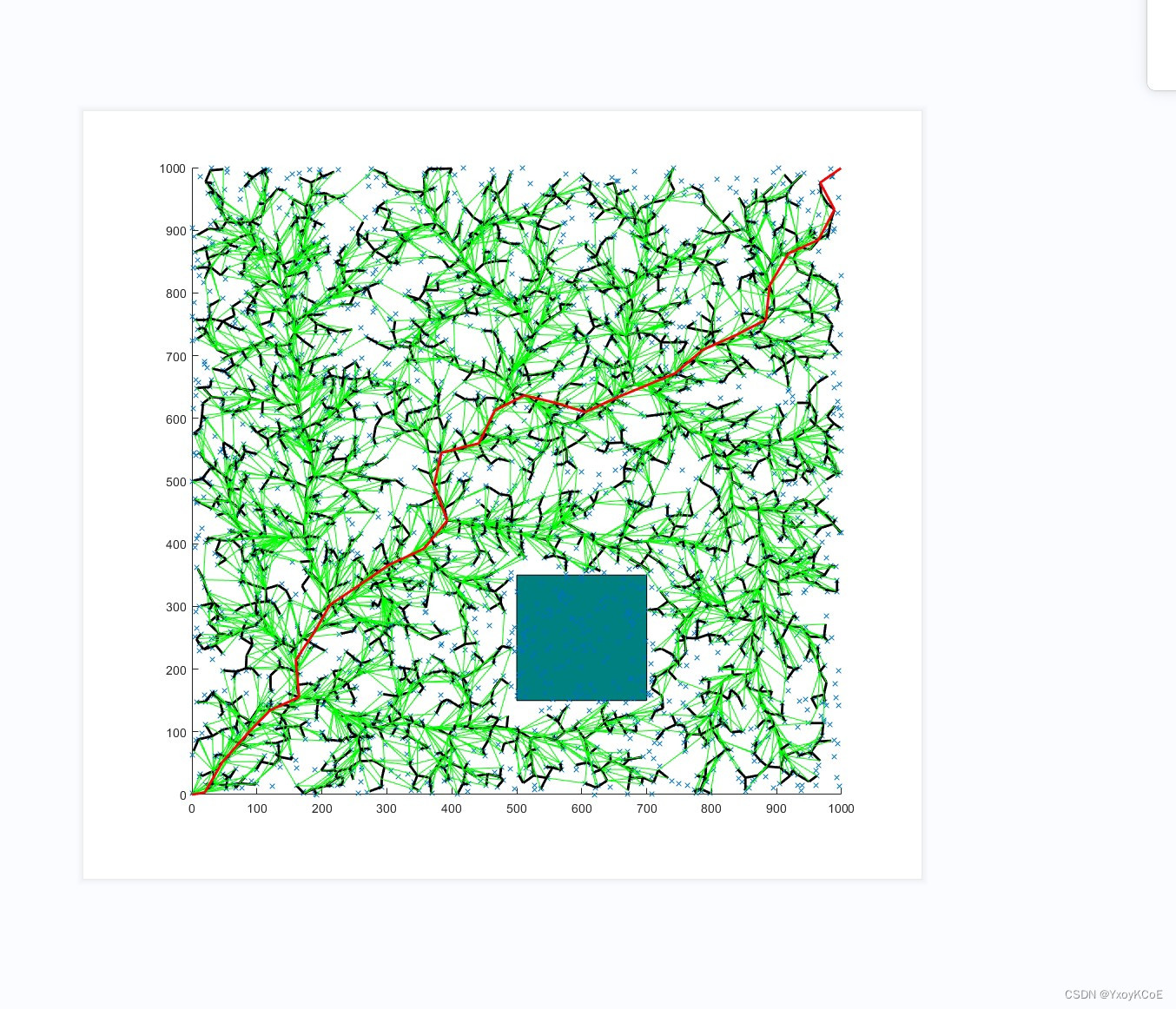
2.2 RRT*算法
RRT*算法(Rapidly-explore Random Tree)是一种基于随机树的路径规划算法。该算法通过随机采样和树的扩展,逐步构建路径树,并通过优化策略寻找最优路径。RRT*算法具有快速构建路径树、全局优化能力强等特点。
2.3 DWA算法与RRT*融合算法
本文提出的DWA算法与RRT*融合算法综合了两种算法的优点。首先,通过DWA算法的速度空间建模和随机采样,确定候选速度和方向。然后,在RRT*算法的基础上,使用候选速度和方向作为扩展目标,构建路径树。最后,通过优化策略选择最优路径,完成路径规划。
3. 算法流程
3.1 DWA算法的流程
DWA算法的流程包括以下几个步骤:
(1)获取机器人当前状态和目标状态;
(2)建立速度空间,确定速度和方向的取值范围;
(3)利用激光雷达扫描信息,评估速度和方向的安全性;
(4)根据评估结果,选择最优速度和方向。
3.2 RRT*算法的流程
RRT*算法的流程包括以下几个步骤:
(1)初始化路径树,设置起始点和目标点;
(2)随机采样,生成扩展目标;
(3)根据扩展目标,扩展树结构,生成新的节点;
(4)通过优化策略,更新路径树,并选择最优路径。
3.3 DWA算法与RRT*融合算法的流程
本文提出的DWA算法与RRT*融合算法的流程如下:
(1)获取机器人当前状态和目标状态;
(2)建立速度空间,确定速度和方向的取值范围;
(3)利用激光雷达扫描信息,评估速度和方向的安全性;
(4)根据评估结果,选择候选速度和方向;
(5)随机采样,生成新的扩展目标;
(6)根据候选速度和方向,扩展树结构,生成新的节点;
(7)通过优化策略,更新路径树,并选择最优路径。
4. 实验与结果
本文通过实验验证了DWA算法与RRT*融合算法的性能和效果。实验使用了2D和3D地图,并对比了DWA算法、RRT算法、A*算法以及RRT*算法的单独应用效果。实验结果显示,DWA算法与RRT*融合算法在路径规划效果、计算速度和代码稳定性等方面表现出色。
5. 结论
本文提出了一种基于DWA算法与RRT*融合的路径规划算法,并通过实验验证了其性能和效果。该算法不仅能够高效地规划路径,还可以根据实际需求自定义地图。通过合理地融合DWA算法和RRT*算法,本文提出的路径规划算法在实际应用中具有广泛的应用前景。
展望:未来的研究可以进一步改进算法的效率和精度,探索更多路径规划的优化策略,以及将该算法应用于更广泛的领域,如无人机航迹规划、智能交通系统等。
关键词:路径规划,DWA算法,RRT*算法,自定义地图,路径树,效果验证。
相关代码,程序地址:http://lanzoup.cn/767342506389.html


















 809
809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









