







 超级会员免费看
超级会员免费看
 CAN(控制器局域网络)是汽车电子广泛应用的开放式现场总线,采用广播通信机制,支持分布式控制。ISO 11898标准定义了高速和低速CAN,高速CAN最高可达1Mbps,低速CAN可达1000米长。CAN总线使用CAN_H和CAN_L线的电位差表示逻辑0和1,具有显性和隐性电平。CAN总线采用不归零码位填充技术,并通过位仲裁解决冲突。CAN 2.0(A和B部分)于1991年发布,CAN FD于2012年推出,提高了数据传输速率。
CAN(控制器局域网络)是汽车电子广泛应用的开放式现场总线,采用广播通信机制,支持分布式控制。ISO 11898标准定义了高速和低速CAN,高速CAN最高可达1Mbps,低速CAN可达1000米长。CAN总线使用CAN_H和CAN_L线的电位差表示逻辑0和1,具有显性和隐性电平。CAN总线采用不归零码位填充技术,并通过位仲裁解决冲突。CAN 2.0(A和B部分)于1991年发布,CAN FD于2012年推出,提高了数据传输速率。
简介
CAN 是 Controller Area Network 的缩写,即 控制器局域网络。通常称为 CAN BUS,即 CAN 总线。可以归属于工业现场总线的范畴,是目前国际上应用最为广泛的开放式现场总线之一。CAN是一个用于连接电子控制单元(ECU)的多主机串行总线标准。
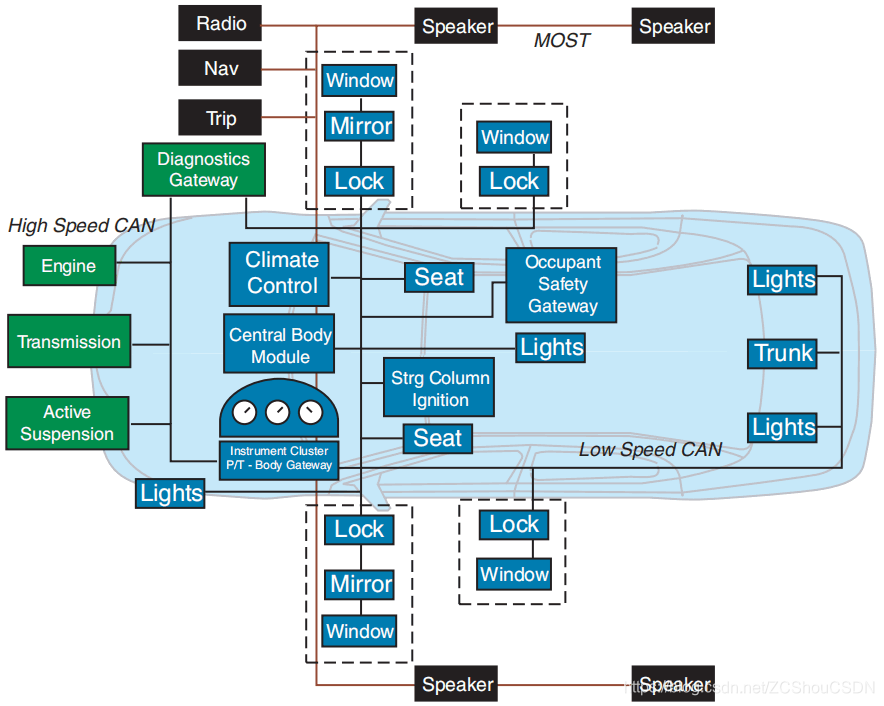
CAN 建立在基于信息导向传输协定的广播机制(Broadcast Communication Mechanism)上,属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。是由以研发和生产汽车电子产品著称的德国 BOSCH 公司为了解决当时汽车控制系统的需求而开发的。下图显示了一个典型的 CAN 在汽车网络中的应用
总线结构
CAN 总线是一种广播类型的总线。 这意味着所有节点都可以“听到”所有传输。 无法仅向特定节点发送消息;所有节点都会不可避免地接收所有流量。 但是,CAN 硬件提供本地过滤,因此每个节点只能对有趣的消息做出反应。CAN网络上需要至少两个节点才可进行通信。
ISO 国际标准 ISO 11898-2 和 ISO 11898-3 分别规定了两种 CAN 总

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











