







MATLAB 软件提供了两个函数 acker 和 place 来确定极点配置状态反馈控制器的增益矩阵K 。
函数 acker 是基于求解极点配置问题的爱克曼公式,它只能应用到单输入系统, 要配置的闭环极点中可以包括多重极点。
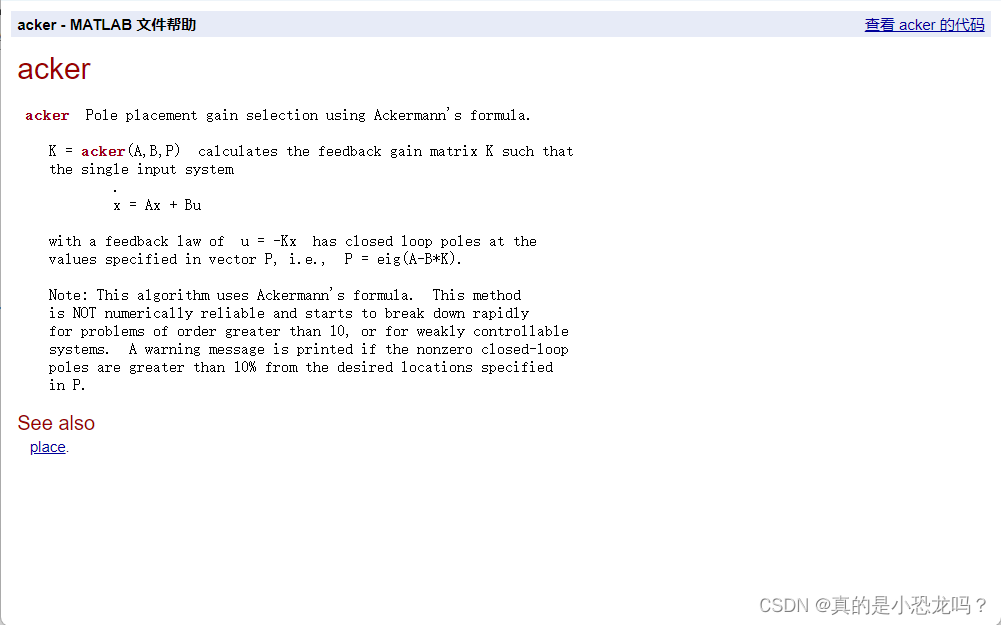
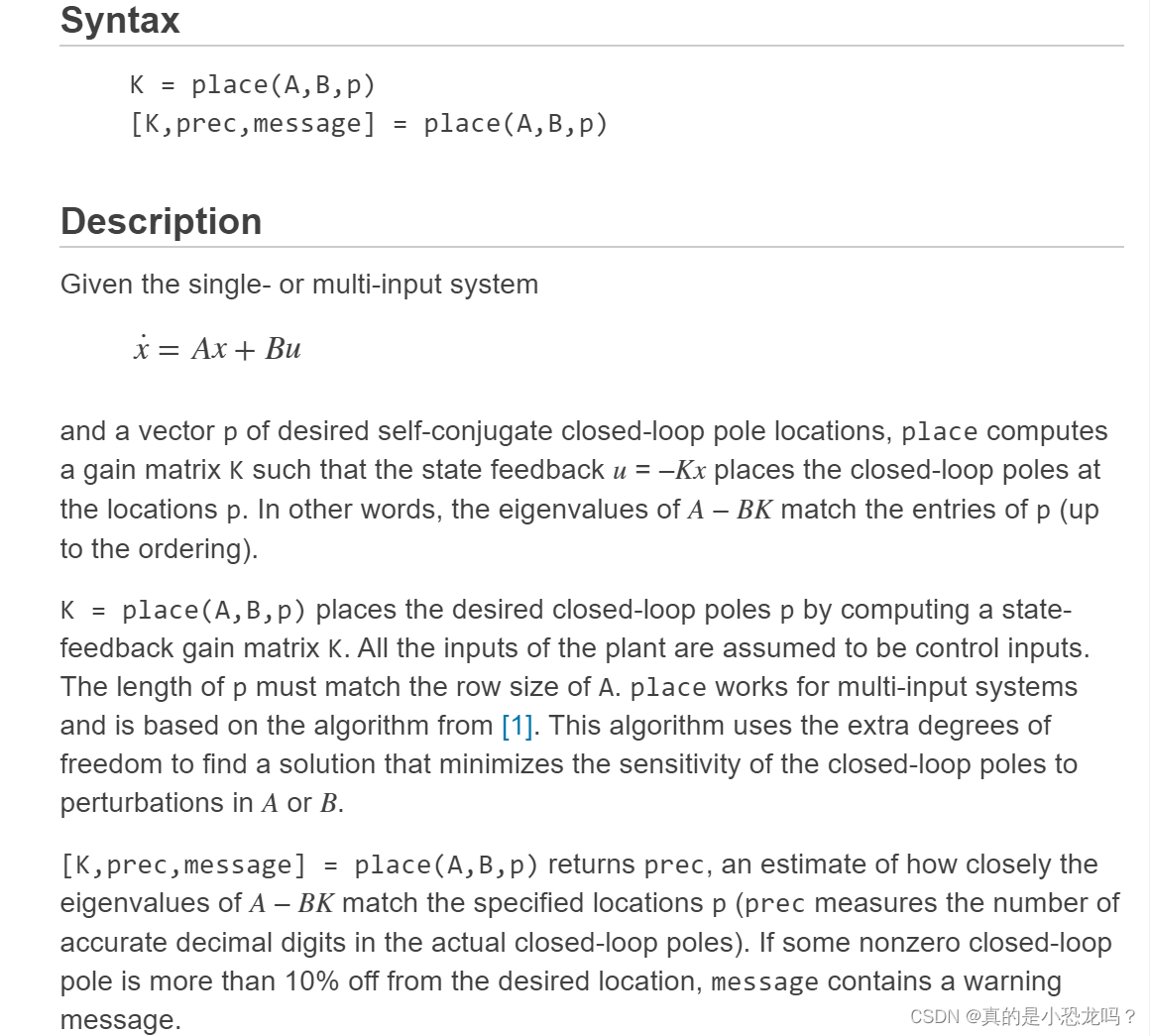
函数place既能计算但输入单输出,也能计算多输入多输出(MIMO) ,但是当要配置的闭环极点中包含大于rank(B)的多重极点时,就必须使用acker
MATLAB 软件提供了两个函数 acker 和 place 来确定极点配置状态反馈控制器的增益矩阵K 。
函数 acker 是基于求解极点配置问题的爱克曼公式,它只能应用到单输入系统, 要配置的闭环极点中可以包括多重极点。
函数place既能计算但输入单输出,也能计算多输入多输出(MIMO) ,但是当要配置的闭环极点中包含大于rank(B)的多重极点时,就必须使用acker
 2182
2182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























