






 本文研究了五种控制器在Simulink中应用,进行了详细仿真并给出了指标评分,以雷达图形式呈现结果。
本文研究了五种控制器在Simulink中应用,进行了详细仿真并给出了指标评分,以雷达图形式呈现结果。
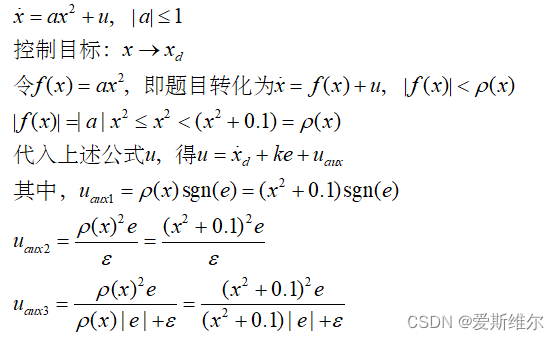
考虑如下系统:
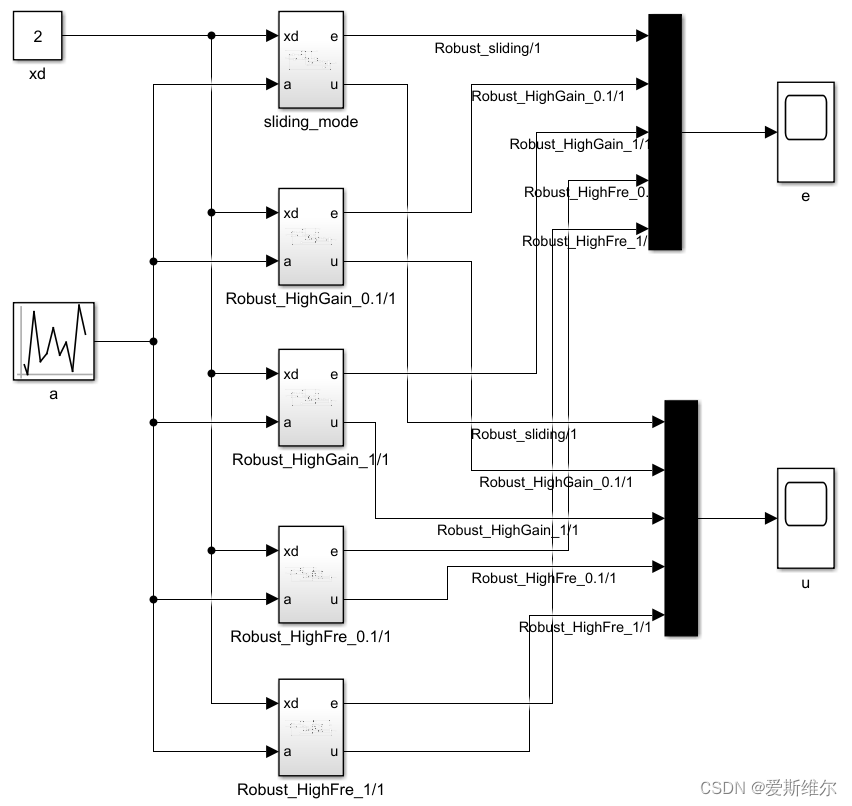
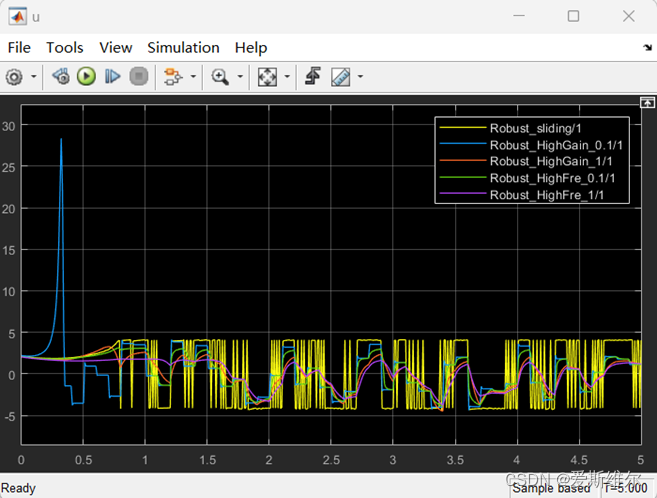
构造五种控制器,分别为Sliding_Mode、Robust_HighGain_0.1/1、Robust_HighGain_1/1、Robust_HighFre_0.1/1、Robust_HighFre_1/1,具体参数见表格,simulink如下图。
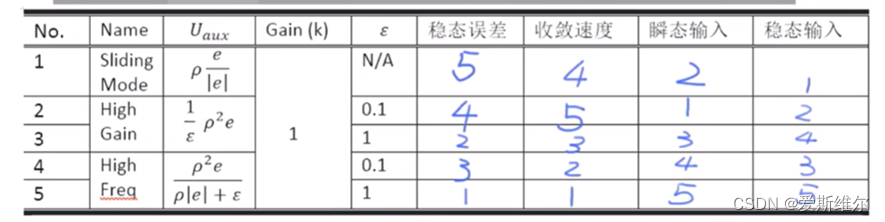
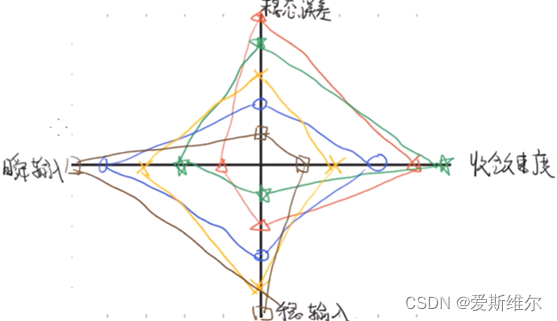
不同控制器的形式及参数如下表所示,其中k=1。运行仿真,并给不同控制器的每项指标打分(5分制)。
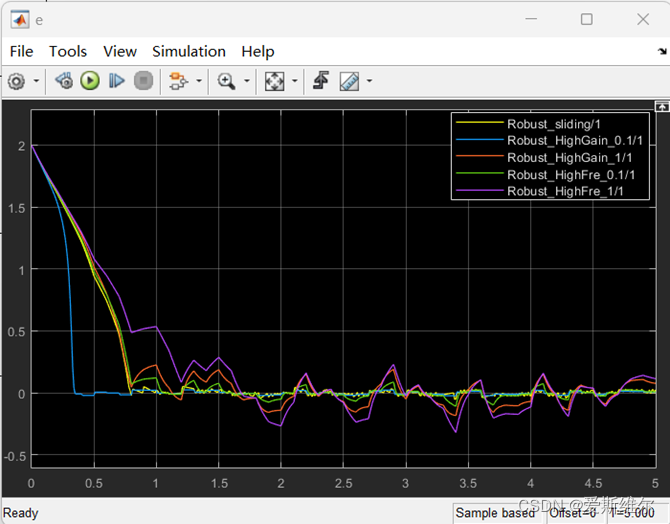
仿真结果:
雷达图:
考虑如下系统:
构造五种控制器,分别为Sliding_Mode、Robust_HighGain_0.1/1、Robust_HighGain_1/1、Robust_HighFre_0.1/1、Robust_HighFre_1/1,具体参数见表格,simulink如下图。
不同控制器的形式及参数如下表所示,其中k=1。运行仿真,并给不同控制器的每项指标打分(5分制)。
仿真结果:
雷达图:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























