






 本文介绍了滑模控制的核心思想,即通过状态反馈控制器设计,利用李雅普诺夫第二方法确保系统趋向滑模面并最终稳定。文章详细解释了滑模面的引入、李雅普诺夫函数的应用以及控制器设计如何影响系统的动态行为,包括理想与实际角度、角速度的比较和相轨迹的展示。
本文介绍了滑模控制的核心思想,即通过状态反馈控制器设计,利用李雅普诺夫第二方法确保系统趋向滑模面并最终稳定。文章详细解释了滑模面的引入、李雅普诺夫函数的应用以及控制器设计如何影响系统的动态行为,包括理想与实际角度、角速度的比较和相轨迹的展示。
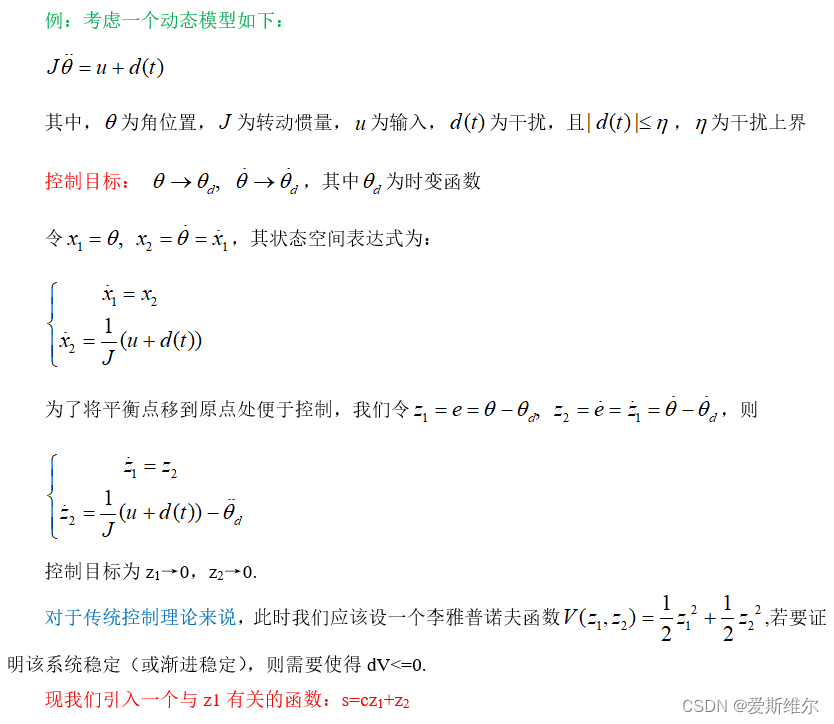
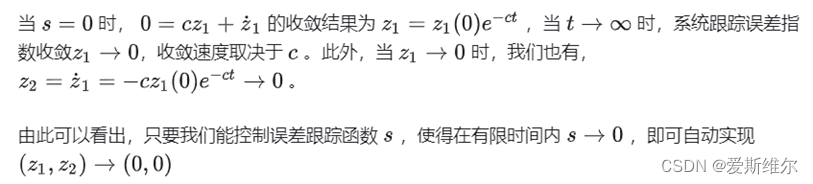
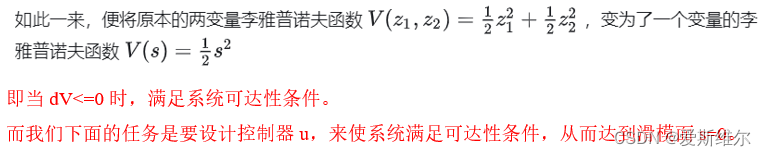
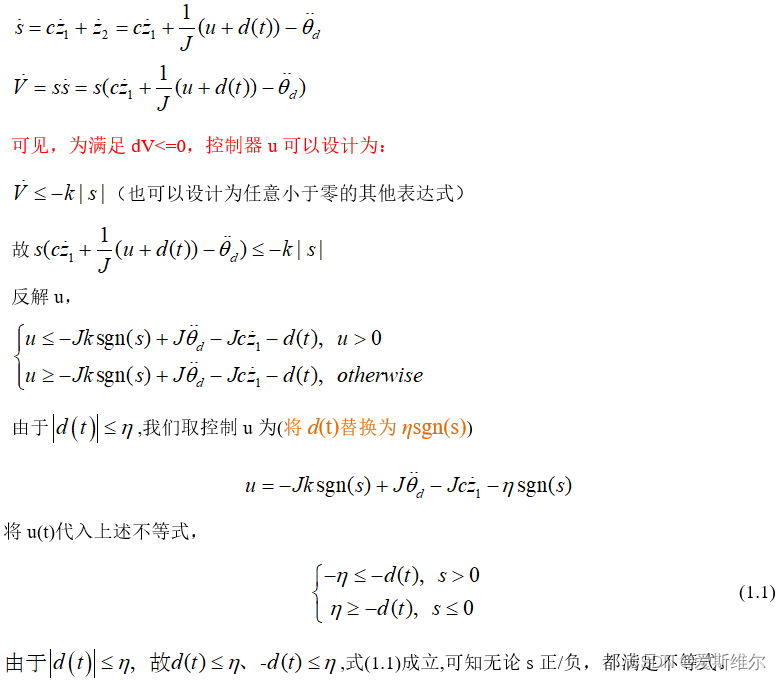
滑模控制的本质上是利用李雅普诺夫第二方法对控制器进行设计的一种方案。它的核心思想是设计一个状态反馈控制器,从而使得系统s逐渐趋近并最终到达滑模面s=0:首先引入一个叫"滑模面"的新的状态变量,重新构造李雅普诺夫函数V=1/2s^2,通过设计控制器u并使V负定(可达性条件),进而保证系统s逐渐趋近于滑模面s=0,到达滑模面之后,系统状态会自发地(无需控制)在滑模面上收敛到平衡状态。
为了方便,我不再进行CSDN编写,直接插入之前笔记的图片。
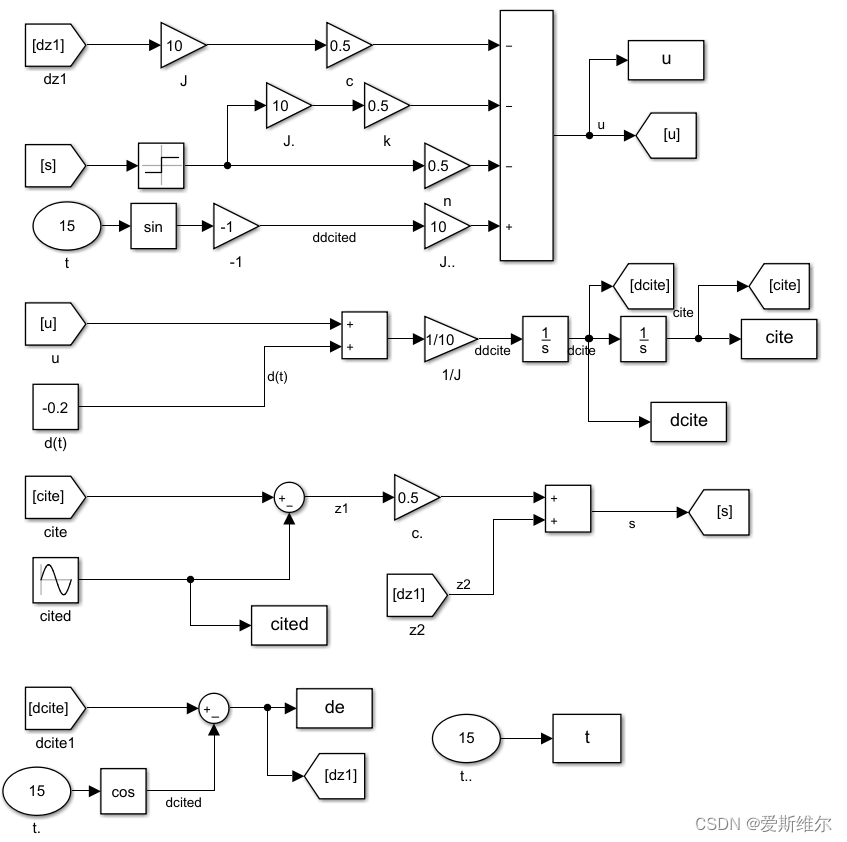
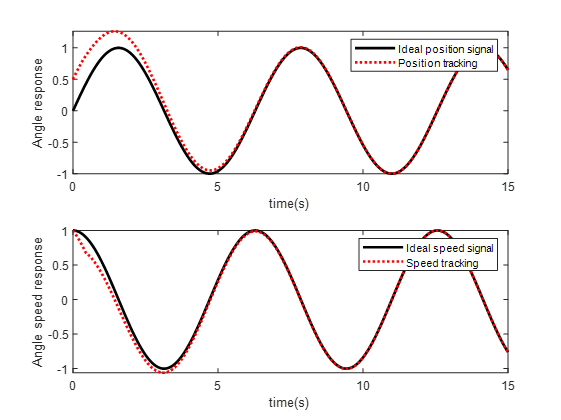
编写绘图代码,得到结果如下:
(1)理想角度与实际角度、理想角速度与实际角速度
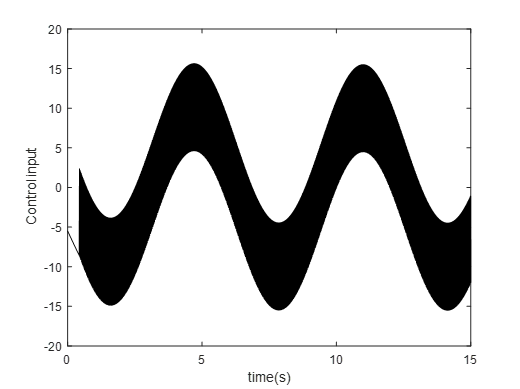
(2)控制器输出u
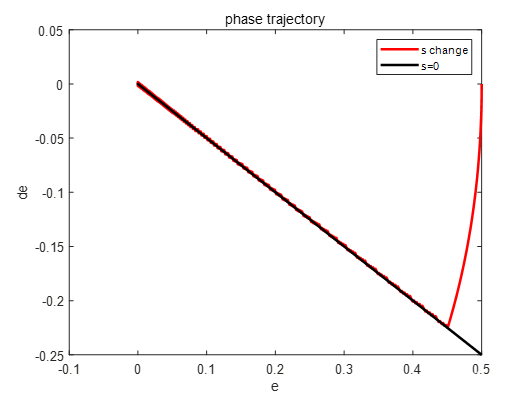
(3)相轨迹
需要模型和代码的请留下邮箱。


















 601
601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











