






分析:项目是在原有Simulink给小车给左右轮的速度,控制vrep小车运动的基础上。IMU惯性测量单元,是一种使用加速度计和陀螺仪来测量物体三轴姿态角(或角速率)以及加速度的装置。
源代码下载地址:https://github.com/xiaowan1117/vrep_IMU
步骤:
- 打开原有的vrep环境,在components/sensors下找到加速度传感器(Accelerometer)和陀螺仪(GyroSensor)增加到环境中。
- 调整加速度传感器(Accelerometer)和陀螺仪(GyroSensor)位姿,使其与小车的位姿一致。
- 将加速度传感器(Accelerometer)和陀螺仪(GyroSensor)拖放在小车下。
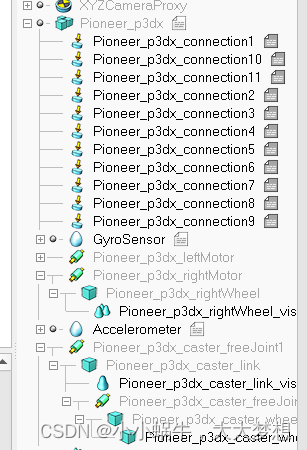
- 双击打开GyroSensor后的脚本文件,打开后,增加一条语句,把得到的数据放在gyr表中。

- 同理,双击打开Accelerometer后的脚本文件,打开后,增加一条语句,把得到的数据放在acc表中。

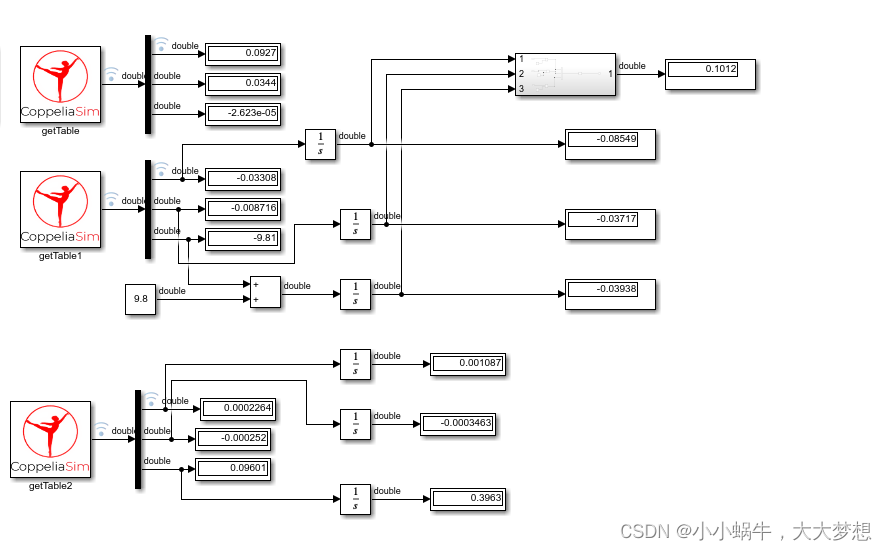
- simulink端,增加了两个getTable,需要改获得表的名字,在acc表中,我们可以得到各方向的加速度,各方向的加速度经过积分器,便可以得到各方向的速度,总的线速度便求解出来。在gyr表中,我们可以得到各方向的角速度,后经积分器,便得到了偏航角、翻滚角和俯仰角。小车只有x,y轴的加速度,可以把Z轴去掉,减小误差,另外因为积分的原因,累计误差会越来越大。在真实的IMU上,我们会加滤波器,将一些噪声去除,减少误差。















 2020
2020











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











