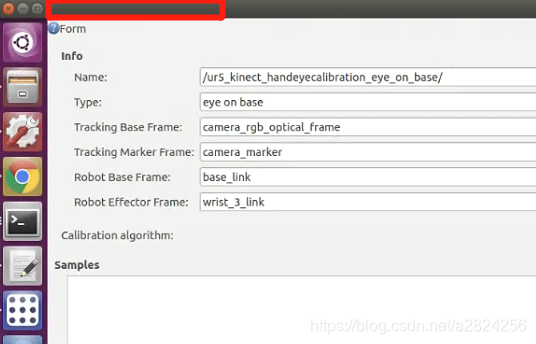
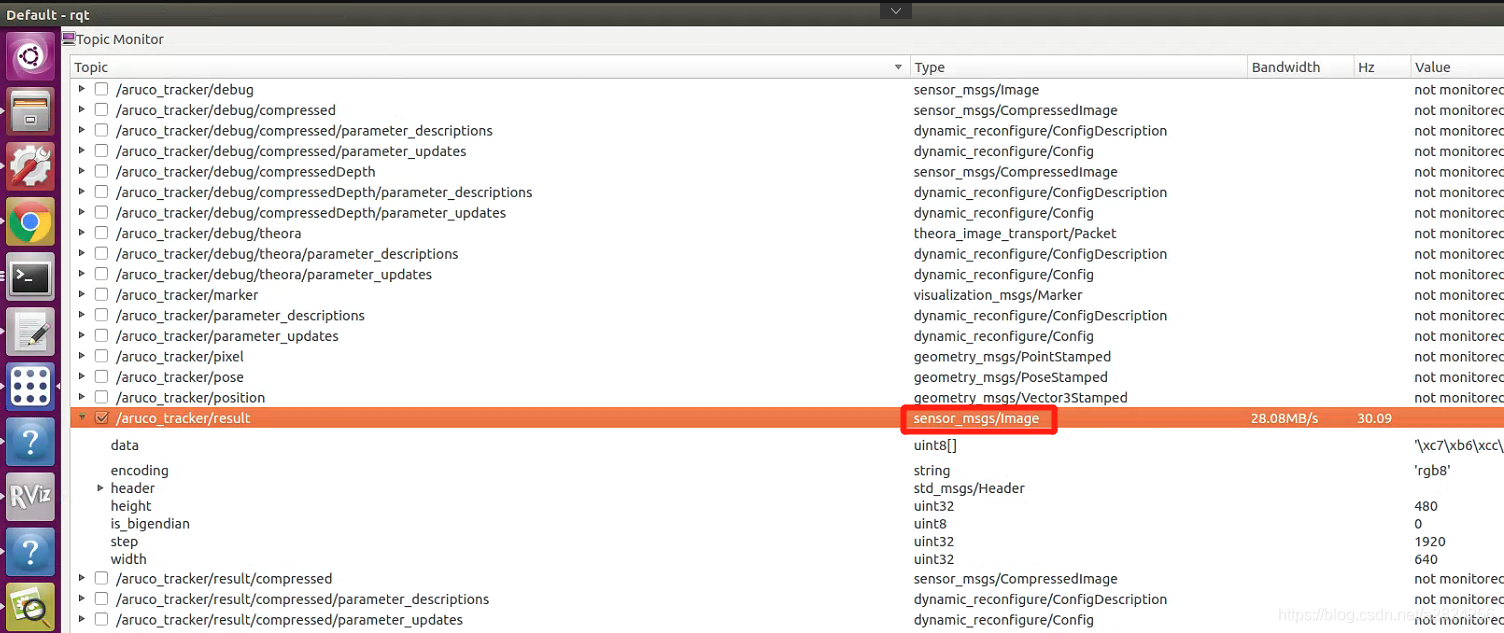
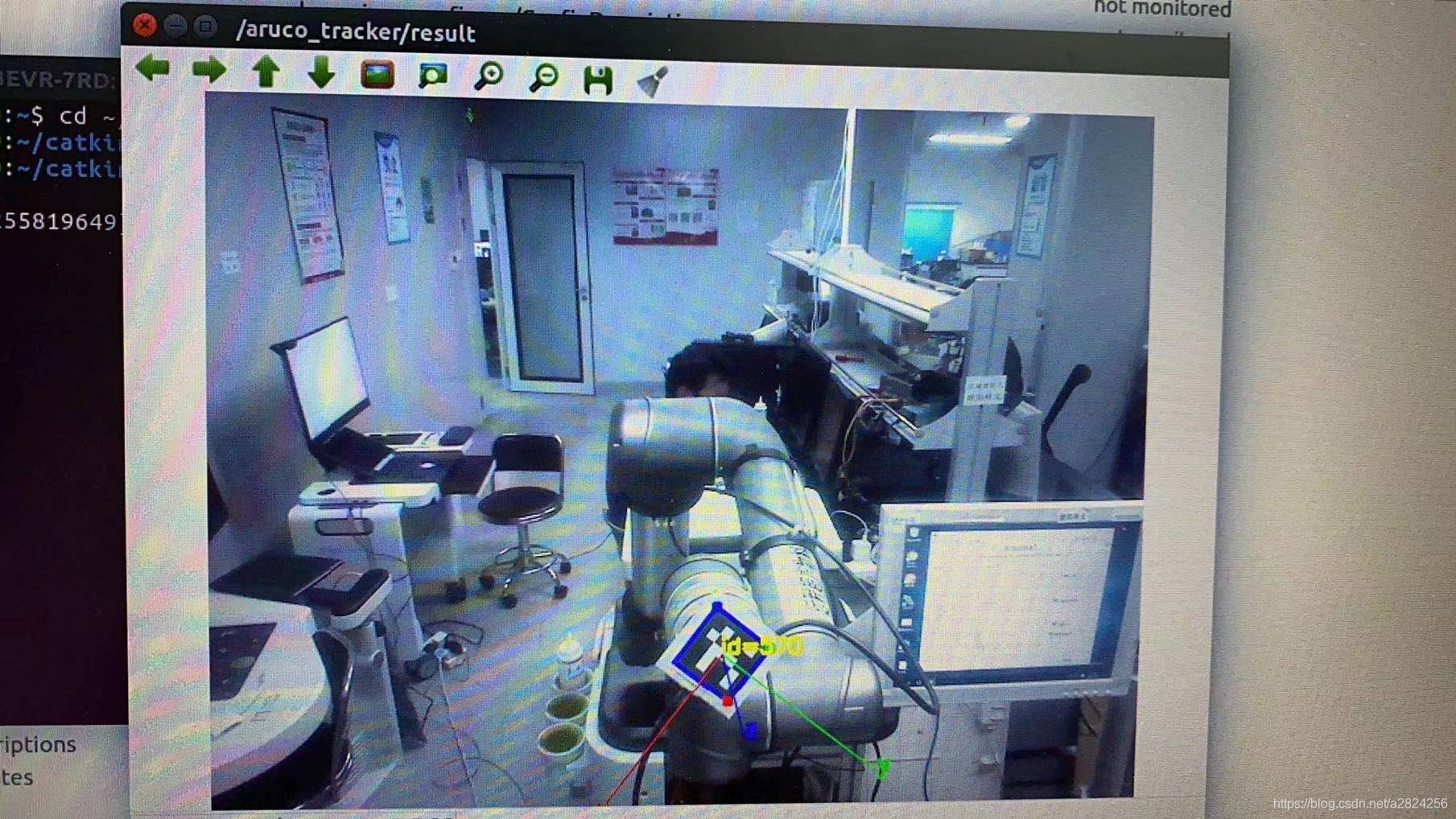
ROS系统easy_handeye手眼标定rqt_easy_handeye没有菜单栏无法打开aruco码位姿检测图像(plugins)的解决方法
最新推荐文章于 2022-11-01 09:23:14 发布

 2246
1676
2246
1676











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言