







【手眼标定】ROS + usb_cam + aruco_ros + easy_handeye_demo
注意:在手眼前先进行相机内参标定以及ArUco markers检测测试,测试成功后再进行手眼标定
ArUco markers检测参考链接
1. 下载运行easy_handeye_demo
这个库是easy_handeye的一个demo,不需要真实的机械臂就可以实现easy_handeye,并且easy_handeye_demo可以作为将easy_handeye与自己的机械臂整合的一个例子
- 下载easy_handeye_demo及附属包
(1)创建工作空间,克隆仓库
mkdir -p easy_handeye_ws/src
cd easy_handeye_ws/src
git clone https://github.com/IFL-CAMP/iiwa_stack
git clone https://github.com/IFL-CAMP/easy_handeye
git clone https://github.com/marcoesposito1988/easy_handeye_demo
(2)安装依赖
cd .. #回到工作空间easy_handeye_ws
rosdep install -yir --ignore-src --from-paths src
(3)编译
catkin build
(4)启动仿真
source devel/setup.bash
# first perform the calibration,默认眼在手外
roslaunch easy_handeye_demo calibrate.launch
可以看到如下界面
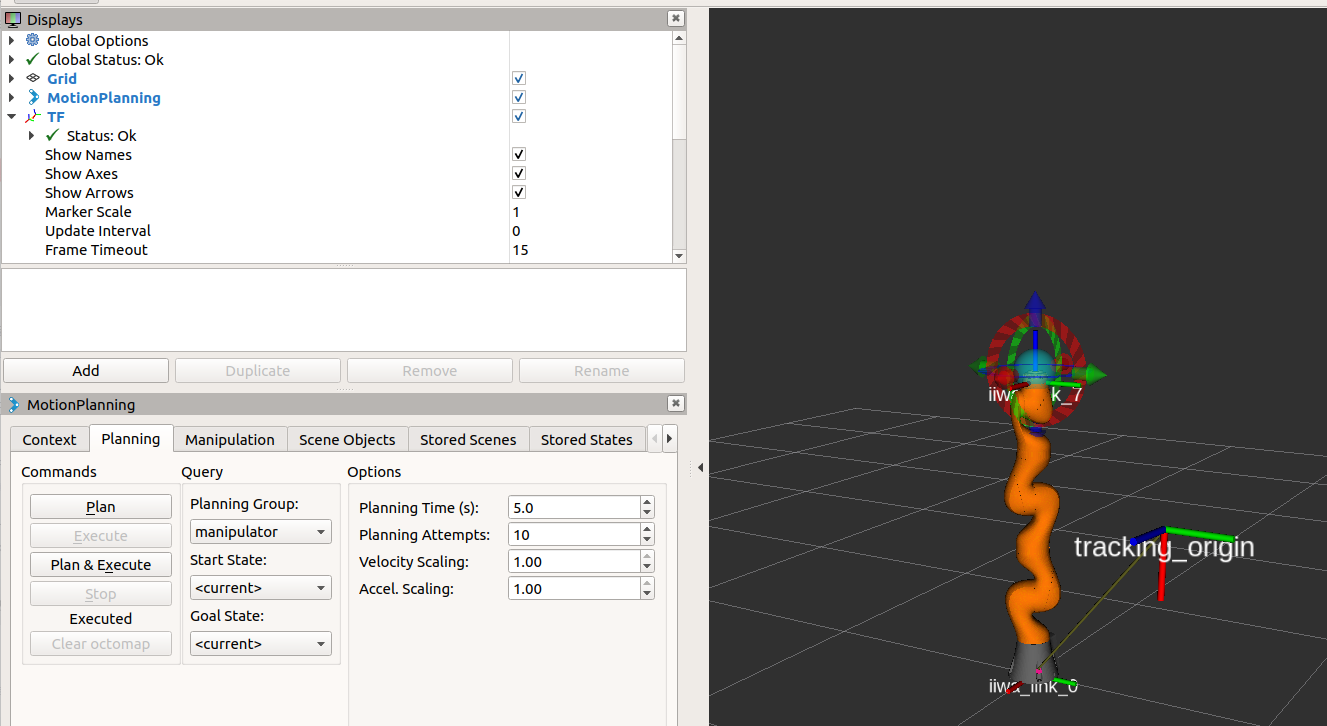
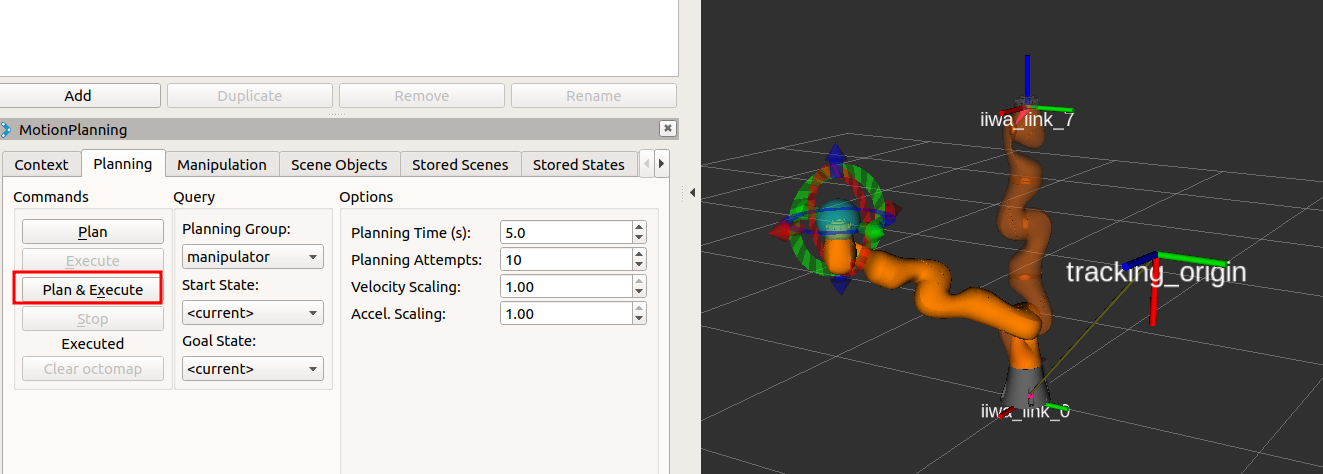
拖动小球可以使机械臂移动,点击plan&Execute可以使机械臂运动到拖动到的位置
再开一个命令窗口,可以通过下面命令验证机械臂运动
# then, check the result
roslaunch easy_handeye_demo check_calibration.launch
可以看到第一个窗口执行plan&Execute,第二个窗口机械臂同步移动
到此easy_handeye_demo运行成功
2. 在仿真中手眼标定准备工作
- 启动相机
roslaunch usb_cam usb_cam-test.launch #根据实际的相机启动文件名进行修改
- 启动aruco_ros检测Marker,这里有问题看这篇文章
cd ~/aruco_ws
source devel/setup.bash
roslaunch aruco_ros single.launch
- 修改easy_handeye_demo的laucnh文件
复制 easy_handeye_demo/launch/calibrate.launch文件作修改,并命名为calibrate2.launch,修改以下参数
<arg name="robot_base_frame" value="iiwa_link_0" />
<arg name="robot_effector_frame" value="iiwa_link_ee" />
<arg name="tracking_base_frame" value="usb_cam" />
<arg name="tracking_marker_frame" value="aruco_marker_frame" />
tracking_base_frame: marker的坐标系的参考坐标系,这里写相机坐标系的参考坐标系,也就是相机坐标系。
tracking_marker_frame: marker 坐标系,即 aruco 设置的 marker_frame
- 启动标定文件进行标定
cd easy_handeye_ws
source devel/setup.bash
roslaunch easy_handeye_demo calibrate2.launch
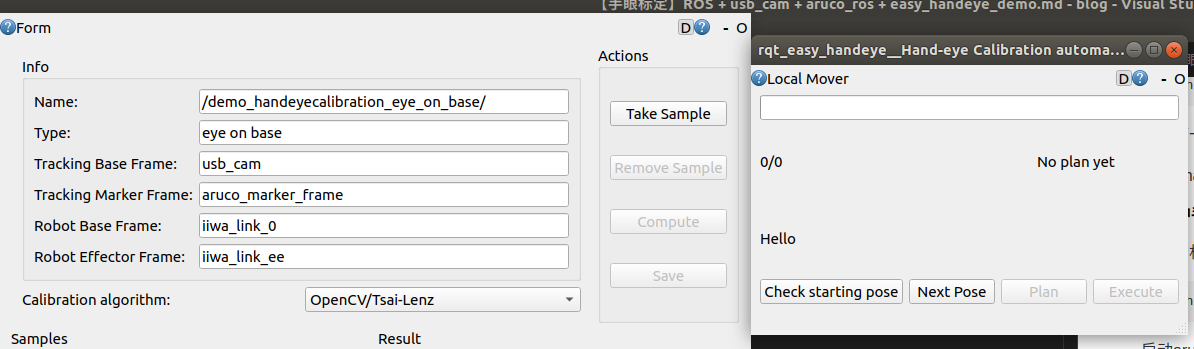
正常情况下会出现四个界面,一个是相机画面,一个是同上文的rviz仿真界面,下面的两个标定界面
但是我的一开始没有出现这两个标定界面,查看运行终端的报错信息,发现缺少相应的安装包

安装pyqt5,由于我的ros版本为melodic,运行环境为python2.7,参考该篇博客直接安装PySide2即可
pip install PySide2
然后还缺少transforms3d包,直接安装
pip install transforms3d
然后重新运行calibrate2.launch就可以看到上面的标定界面了
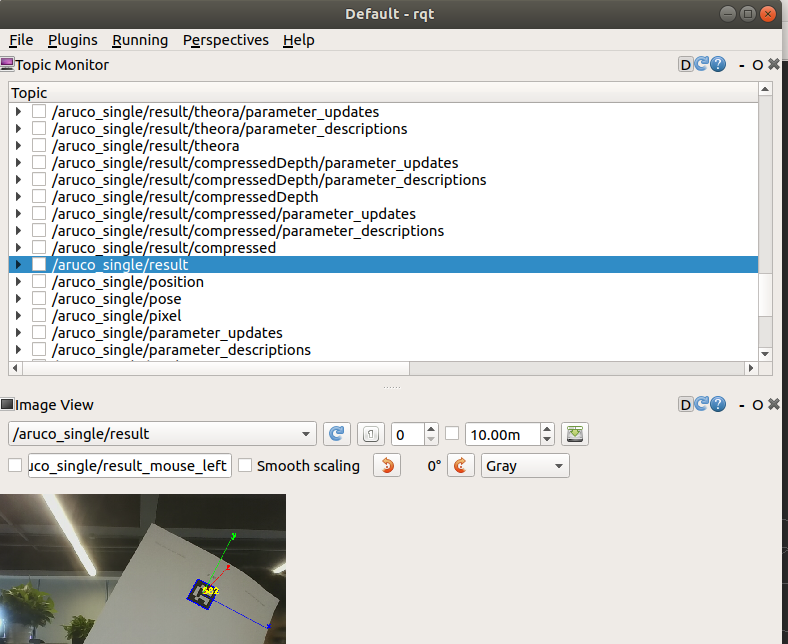
但是rqt_easy_handeye没有菜单栏无法打开aruco码位姿检测图像
解决方法:新开一个命令窗口,打开rqt界面,菜单栏-plugins-topics-topics monitor,查看话题,打开菜单栏-plugins-visualization-image view,订阅/aruco_single/result话题,放入ArUco markers便可以检测到marker的id和坐标轴
2. 开始标定
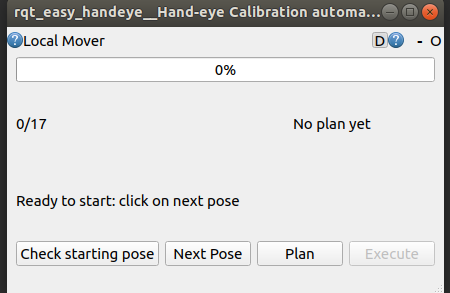
(1) 手动调节机械臂,使 aruco 二维码移动至相机视野中心处附近。点击 check starting pose,若检查成功,界面会出现: 0/17,ready to start
(2) 依次点击 Next Pose,Plan,Execute,机械臂会移动至新的位置,若二维码在相机视野范围内,且能检测成功,则进行下一步
(3) 界面 2 中点击 Take Sample,若 Samples 对话框中出现有效信息,说明第一个点标定成功
(4) 重复执行步骤 2 和步骤 3,直至 17 个点全部标定完毕
(5) 界面 2 中点击 Compute,则 Result 对话框中会出现结果
(6) 界面 2 中 Save,会将结果保存为一个 YAML 文件,路径为 ~/.ros/easy_handeye
出现的问题:
第一步点击 check starting pose时,提示Can't calibrate from this position!,解决办法:拖动小球找到能够进行标定的位姿(有点麻烦,我也找了很久)
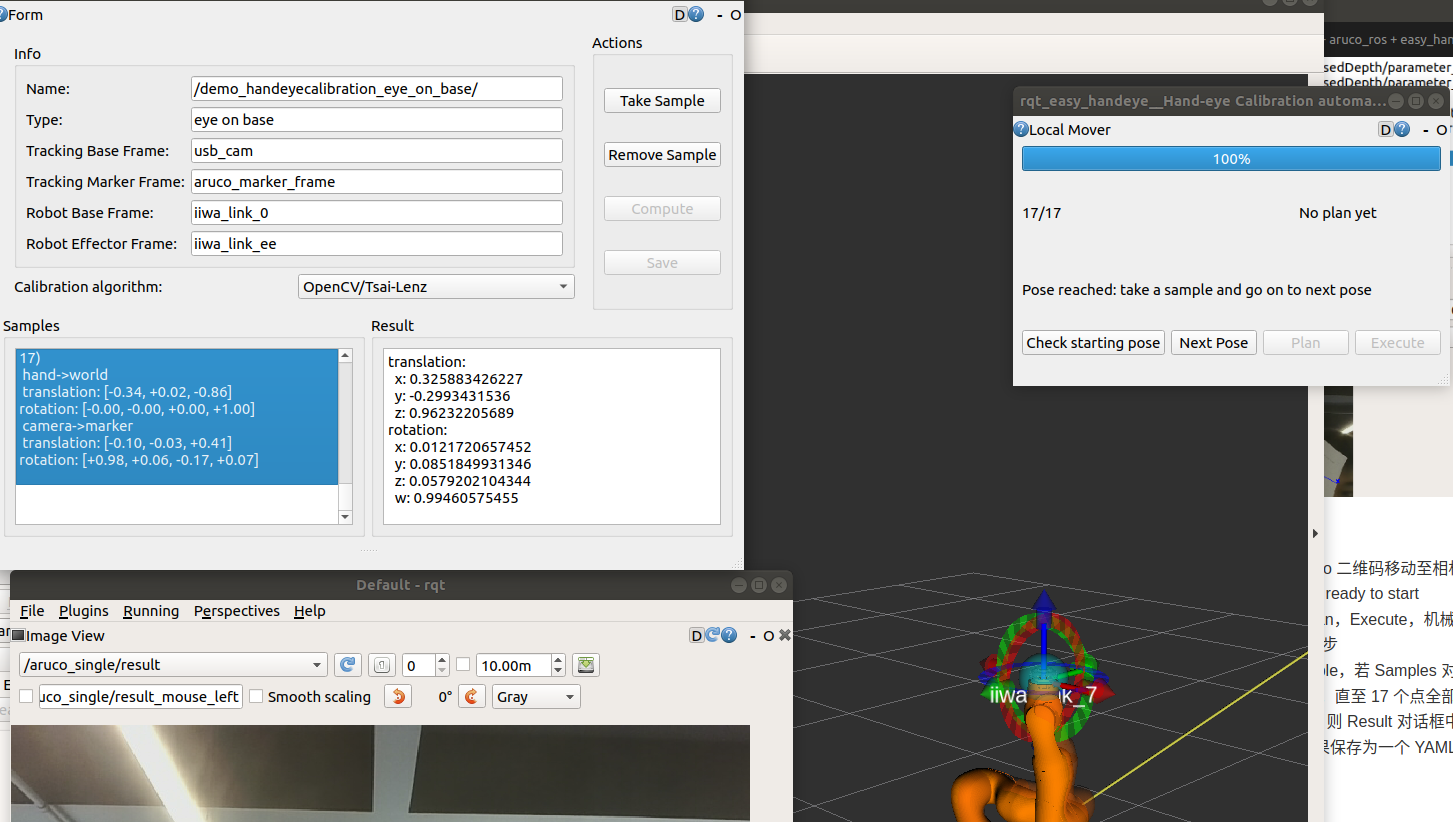
然后继续进行第二步,得到如下图

标定完成界面
3. 发布TF(待研究)
easy_handeye 功能包提供了 publish.launch 文件,可以将标定好的 TF 发布出。注意修改 namespace_prefix 参数与标定的 launch 文件中的保持一致,这样才能找到标定好的 YAML 文件。
roslaunch easy_handeye publish.launch eye_on_hand:=false namespace_prefix:=demo_handeyecalibration
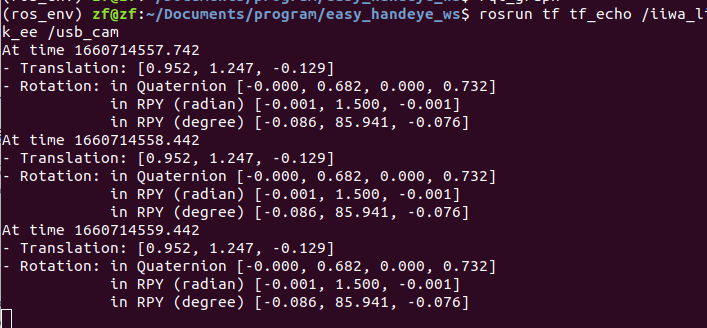
# 查看 TF(基坐标系到相机坐标系)
rosrun tf tf_echo /iiwa_link_0 /usb_cam














 1055
1055











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









