







前言
自校正控制是自适应控制中的一种,想要学习自校正控制的话,需要先学习系统辨识,系统辨识中比较常见的是最小二乘法,因此后续会先介绍最小二乘法,再去完成自校正控制。
最小二乘法原理
假定我们有一个系统传递函数为 G = b0 / (a0 * s^2 + a1 * s + a2),那么我们可以将其转换为状态方程的形式,方便后期处理:
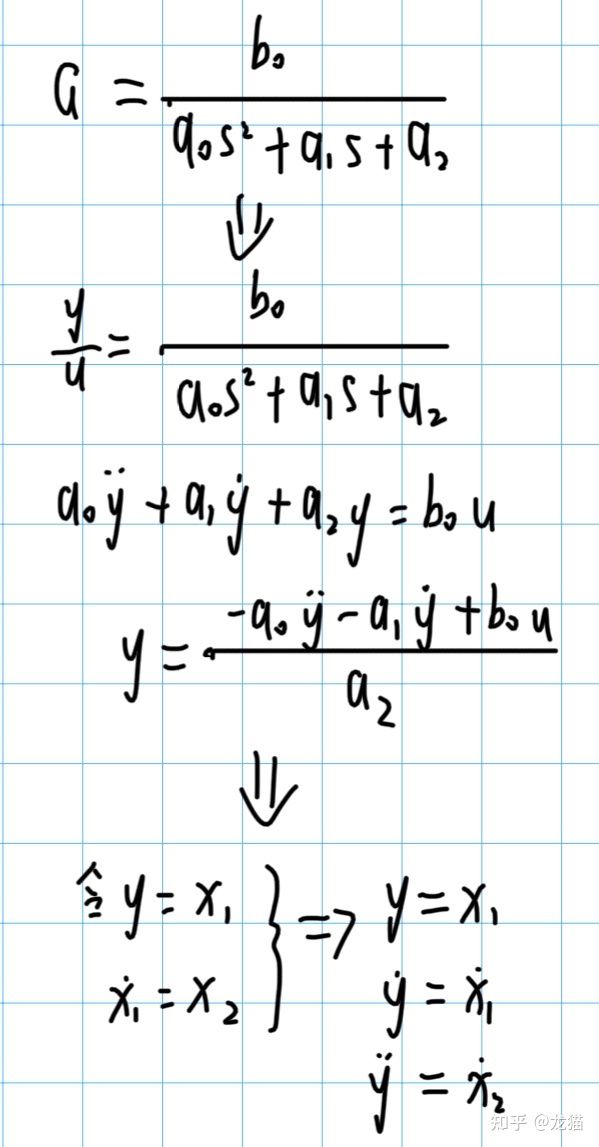
之后可以将上面的微分方程写出如下的形式:
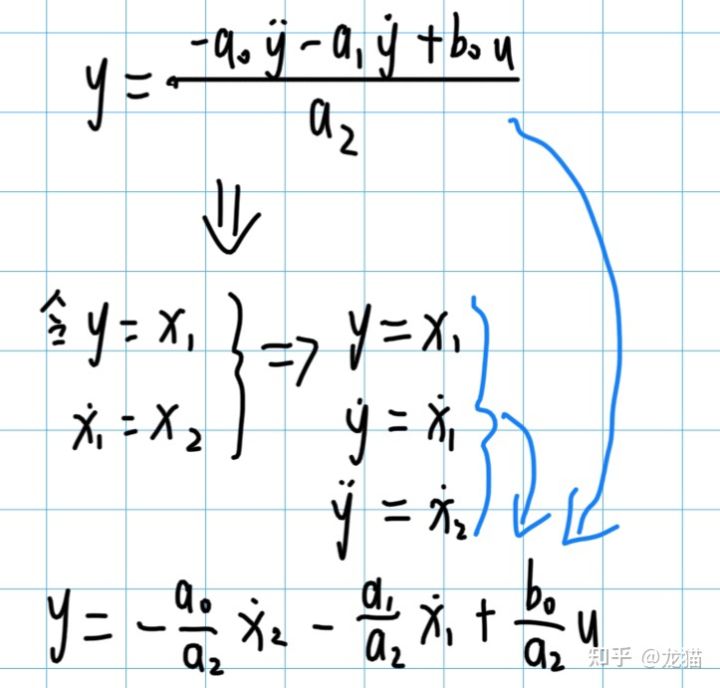
根据上面的微分方程,我们可以将各个数据分解为两个部分,一部分为数据向量,记作φ;另一部分为参数向量,记作θ。根据上式就可以将输出 y 用这两个向量来表示,即:
y = φ' * θ :
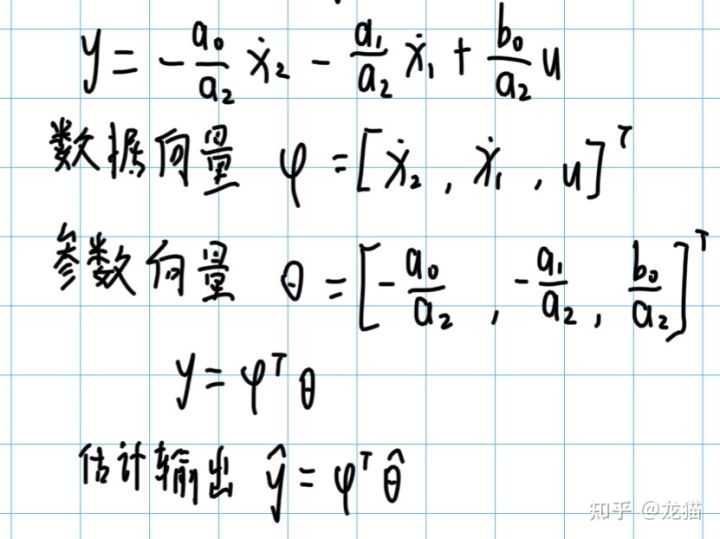
上面将估计输出 y_hat 也一起写出了,θ_hat 便为估计参数。我们的目的就是把估计参数 θ_hat 计算出来。
批处理最小二乘法
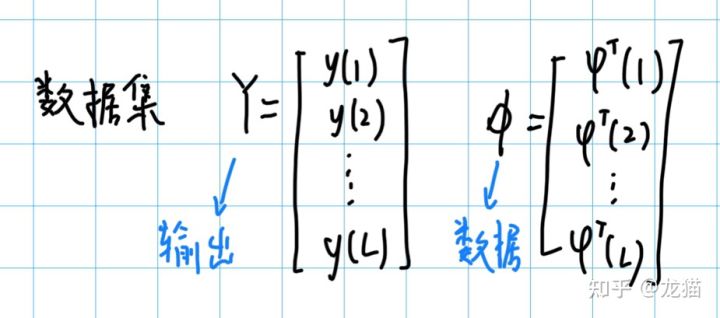
批处理最小二乘法是使用在采集完所有数据之后,我们采集完后,可以将数据集写出来:
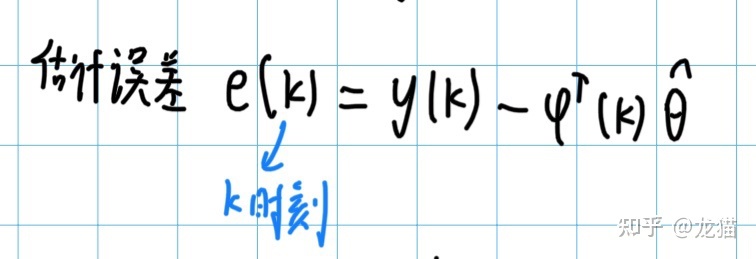
引入一个估计误差的变量,记作 e:
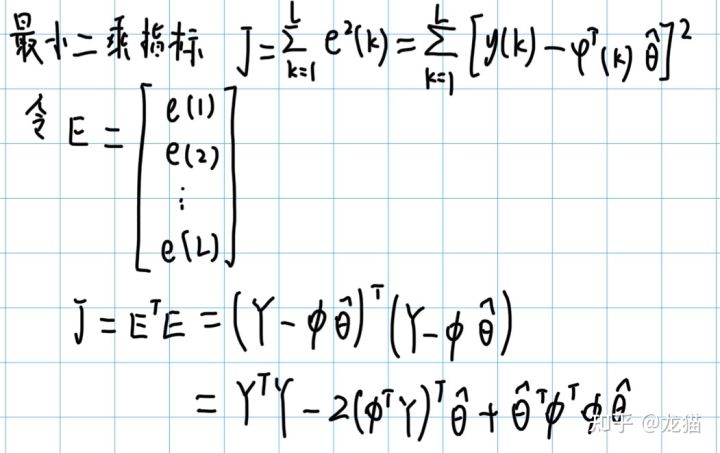
之后可以根据误差 e,写出最小二乘的指标函数 J:
对 J 求导,便可以得到估计参数 θ_hat 的极值,进而写出估计参数 θ_hat 的表达式:
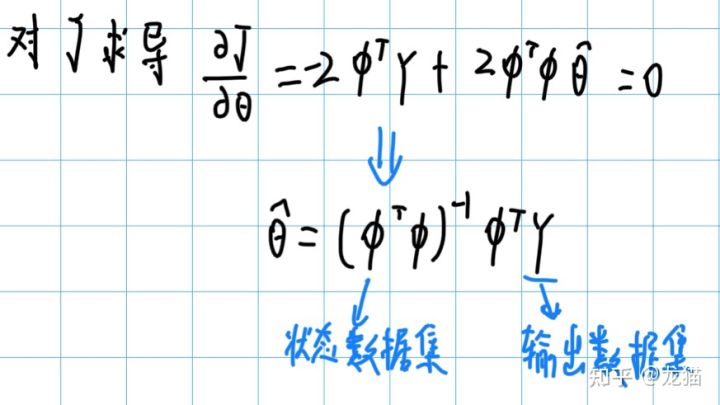
至此,便得到使用批处理最小二乘法进行系统参数估计的表达式。采集完数据之后,便可以得到估计参数矩阵 θ_hat ,进而可以转化为传递函数参数。
当然批处理最小二乘法是一种数据预处理的方法,它适合进行系统参数的初步预估,并不适合实时估计,用于数据的预处理是可以的。当然,毕竟其是一种时域数据的处理方法,对高频的数据,其处理的结果还是会有所偏差。
















 1588
1588











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









