







在上一篇关于贝塞尔曲线平滑路径的文章中,只是大致的介绍了一下贝塞尔曲线的原理,并且初步测试了一下,最终平滑的效果,还是不尽人意的,最开始是使用了简易的多段二阶贝塞尔,得到的曲线有很多的尖锐:
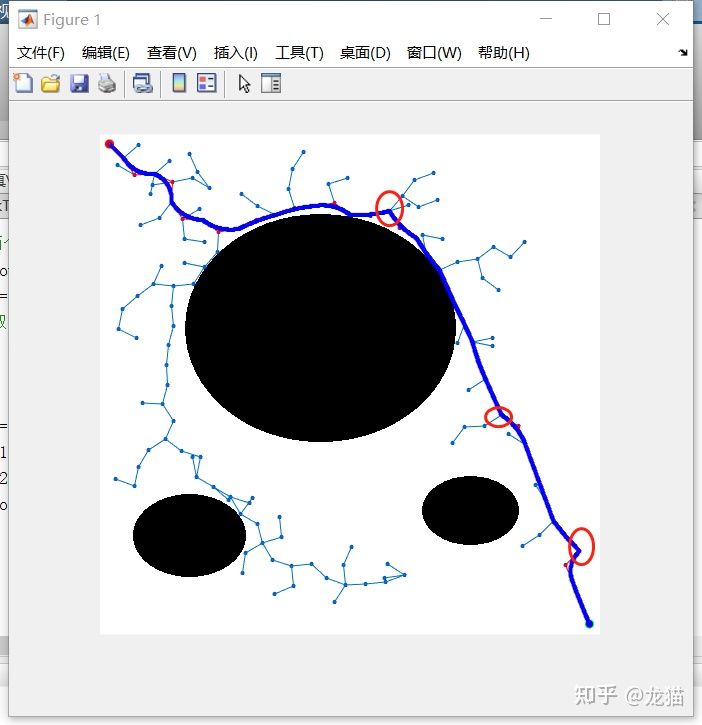
然后使用了全局的贝塞尔,也就是所有的点全一次用上,得到一个N阶贝塞尔,但是这样就会有一个缺点,那就是当转弯很多的时候,它的效果就并不那么好了,就像这样:

有时就会出现上述的情况,比较容易压到障碍,并且与原路径差别较大。
那么在实际的贝塞尔优化路径的使用中,经常使用的方法可以直接告诉大家:使用多段五阶贝塞尔 + 插辅助点的方法。
具体为什么用五阶,而不是四阶,三阶,这些只是前人尝试得出来的经验,不过想要改成非五阶,思路,方法也都是一样的,可以根据自己的需求来自行调整。
辅助点的作用
这里最关键的就是辅助点的添加,在上一篇中的多段二阶贝塞尔中之所以会有各种尖角,是由于两段贝塞尔曲线的连接处,曲率不同,不共线,因而导致曲率突变,因此想要做好多段贝塞尔的效果,辅助点的添加是关键。
辅助点的要求
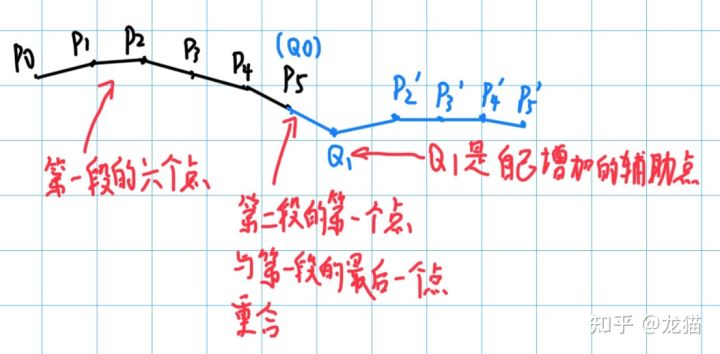
假设每一段五阶贝塞尔所需要的六个点,从起始到最后记作P0 - P5,那么下一段五阶贝塞尔曲线的起始点要与本段的末端点重合,假设下段的起始点记作Q0,即Q0 = P5,之后的第二个点Q1就是辅助点,在辅助点之后,再读取后面的四个点作为第二段的剩余四个点,如下图所示:
最重要的当然是辅助点Q1的选取,辅助点应该满足几个条件:
1)Q1要与P4-P5共线
2)Q1不能在P4-P5中间 ---> Q1 - P4 ≥ P5 - P4 ≥ Q1 - Q0
3)Q1与Q0的距离比Q2与Q1小 ---> || Q1 - Q0 || ≤ || Q2 - Q1 ||
4)Q1与Q0的距离小于或等于P5与P4的距离 ---> Q1 - Q0 = n * (P5 - P4), n∈(0,1]
5)P5与Q0重合 ---> P5 = Q0
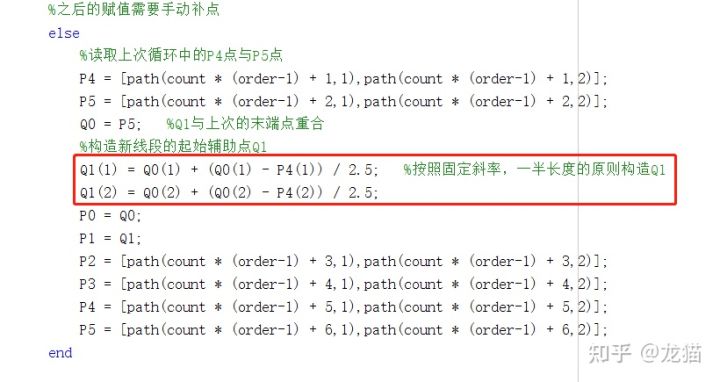
之后根据上述的条件,我们就可以在之前的RRT程序后面,加上贝塞尔的程序,重点还是关于辅助点Q1的选择,由于RRT程序中的随机搜索距离都是固定距离,因此可以按照固定斜率,接近一半长度的原则构造Q1,如下所示:
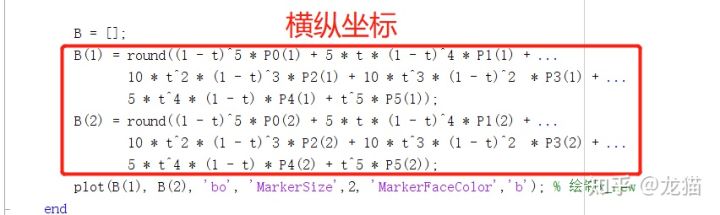
五阶贝塞尔的公式也比较容易推导:
P(t) = (1 - t)^5 * P0 + 5*(1 - t)^4*t * P1 + 10*(1 - t)^3*t^2 * P2 + 10*(1 - t)^2*t^3 * P3 +
5*(1 - t)*t^4 * P4 + t^5 * P5
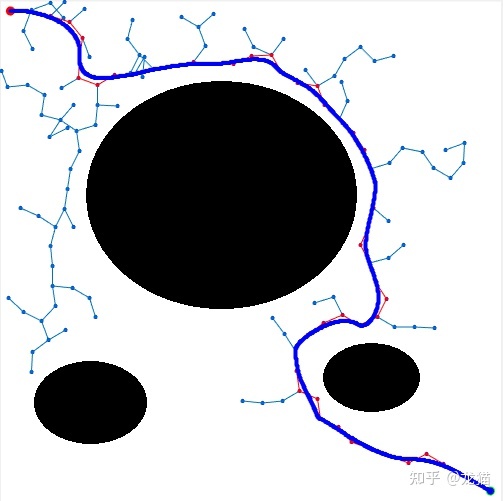
如果最后剩余了有3个点,那么最后的三个点,就可以用四阶贝塞尔补上(上段的最后一个点Q0 + 辅助点Q1 + 最后的三个点一共五个点,构造四阶贝塞尔);如果剩余有2个点,则用三阶,依次类推将最后的几个点也一起用贝塞尔平滑,最终得到的效果如下:
可以放一个完整过程的视频:
五阶贝塞尔优化RRT曲线
















 4394
4394











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









