







目录
0 引言
1 明确研究内容
1.1 课题研究目的
1.2 明确技术领域
1.3 使用环境
2 了解各种相机基本知识
2.1 相机类型和原理
2.2 总结使用要求
2.3 参考相同研究的相机
3 镜头选型
4 选型结果
4.1相机选型结果
4.2 镜头选型结果
4.3 购置成本
***********************************************************************************************************
0 引言
学习和研究多传感器融合或机器视觉的首要任务是选购一台属于自己课题组的相机,但是随着机器视觉领域的发展,市面上的相机类型和型号也多种多样,这为相机选型带来很大的困扰。以下是本人在选型相机时的心得和建议,希望能为大家提高有用的思路。
1 明确研究内容
1.1 课题研究目的
多传感器融合定位,以提高GNSS RTK退化场景的定位精度。
1.2 明确技术领域
自动驾驶;环境感知;多传感器融合。
1.3 使用环境
室外自然光下较长时间工作。
2 了解各种相机基本知识
想必刚接触视觉或图像的时候,对各种相机的了解也不充分不完备。这里仅指出重点关注内容,具体内容分别检索,便可以轻松得到足够的资料。
2.1 相机类型和原理
相机属于光学元件,最基本的原理是小孔成像。主要包括单目相机和深度相机,深度相机又包括TOF原理、结构光原理和双目视差原理,对比分析各种相机的优劣,以及自己的研究目的和传感器,通常有LiDAR就不需要深度相机了(因为LiDAR获得的距离信息要比相机获得的深度信息精度高或距离远)。最好深刻理解,同时学习它的坐标系转换和内外参标定等知识,肯定会用得到,早看早理解,更便于相机选型。
对于红外相机、热成像相机、全景相机等设备,一般不适用于多传感器融合定位,也不适合用于SLAM研究领域。还有一些如openmv的板载模块,仅适用于比赛等“玩具”,不适合进行工程应用。这些非主要相机,仅大概了解即可。
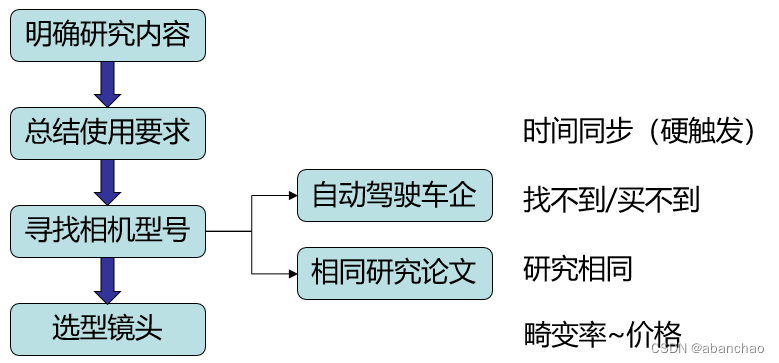
2.2 总结使用要求
分辨率、焦距、视场角、帧率等等,但是刚入门的我们不知道多大的指标够用。我认为先初步理解原理和意义,有相机型号后进行推算验证更合理。
此外,有以下注意事项:
- 课题的多传感器系统是否需要时间同步,以及同步方式。(硬触发时间同步精度更高)
- 是否需要二次开发,是否需要可靠的技术支持。 (通常大品牌会提供SDK程序包)
- 相机质量是否稳定,是否有售后保障。 (市场占有率越高,质量越稳定)
- 注意数据接口。 (USB2.0的不能硬触发;速率慢)
2.3 参考相同研究的相机
一种方法,是查找自动驾驶做的好的车企采用什么方案,但是基本差不多型号,或者买不到,车企通常有专门的供应商;
另一种方法,是参考数据集的相机,最著名的是KITTI数据集,但是过去十多年了,已经停产了。
还有一种方法,是查阅相同研究内容的论文,看看他们用的是什么相机。毕竟他们选型相机的时候也肯定进行过调研和分析。
3 镜头选型
若选定工业相机,还要对镜头进行选型。
镜头的关键指标是以下几点,价格也主要受到这些指标的影响:
- 靶面尺寸。镜头的靶面尺寸要大于相机的靶面尺寸,否则图像会出现四个暗角。
- 光学畸变。畸变率有两种,分别是光学畸变和TV畸变,由加工工艺水平影响,一般的品牌都会标注光学畸变,但是像长步道就标注TV畸变。无法换算和比较。
- 视场角。靶面尺寸决定视场角,选择大靶面(1"以上)可以具有更大的视野。
4 选型结果
4.1相机选型结果
basler acA1920-40gc
特点:
- 分辨率为200万像素,符合自动驾驶领域的像素值。
- 在我国占有市场率较高的德国品牌,质量稳定,售后有保证。
- 支持二次开发,提供ROS驱动包。
- 官方帮助文档完善,网络教程多,有技术人员解答问题。
- 支持外部触发,可以时间同步。
- 拍摄8位深的图像,帧速率可以达到42fps;拍摄12位深的图像可以达到20fps,可以和LiDAR最大采样率20Hz保持一致。
- 成像芯片是Sony IMX249,比较好。
4.2 镜头选型结果
computar V0826-MPZ
特点:
- 光学畸变率-0.8%,相比海康威视的小,成像质量好。
- 靶面尺寸大,像素高,通用性强。
4.3 购置成本
价格比较高,性价比还算高。
basler acA1920-42gc相机+computar V0826-MPZ镜头+电源线+千兆以太网线=约5300元





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











