







 本文详细介绍了blob特征的概念,利用OpenCV API进行blob特征检测的步骤,包括二值化、连通域提取和中心计算。通过调整参数如minThreshold、maxThreshold和thresholdStep,可以实现对不同大小和形状的blob过滤。此外,还讨论了基于颜色、面积、圆度、惯性比和凸度等不同条件的blob筛选标准,提供了一种默认提取黑色圆形blob的方法。示例代码展示了如何应用这些设置。
本文详细介绍了blob特征的概念,利用OpenCV API进行blob特征检测的步骤,包括二值化、连通域提取和中心计算。通过调整参数如minThreshold、maxThreshold和thresholdStep,可以实现对不同大小和形状的blob过滤。此外,还讨论了基于颜色、面积、圆度、惯性比和凸度等不同条件的blob筛选标准,提供了一种默认提取黑色圆形blob的方法。示例代码展示了如何应用这些设置。
计算机视觉讨论群162501053
收入囊中
- 理解blob特征
- 会利用OpenCV API提取blob特征
- 自己实现blob特征检测
首先要了解,什么是blob特征,我们来看下面两幅图片。
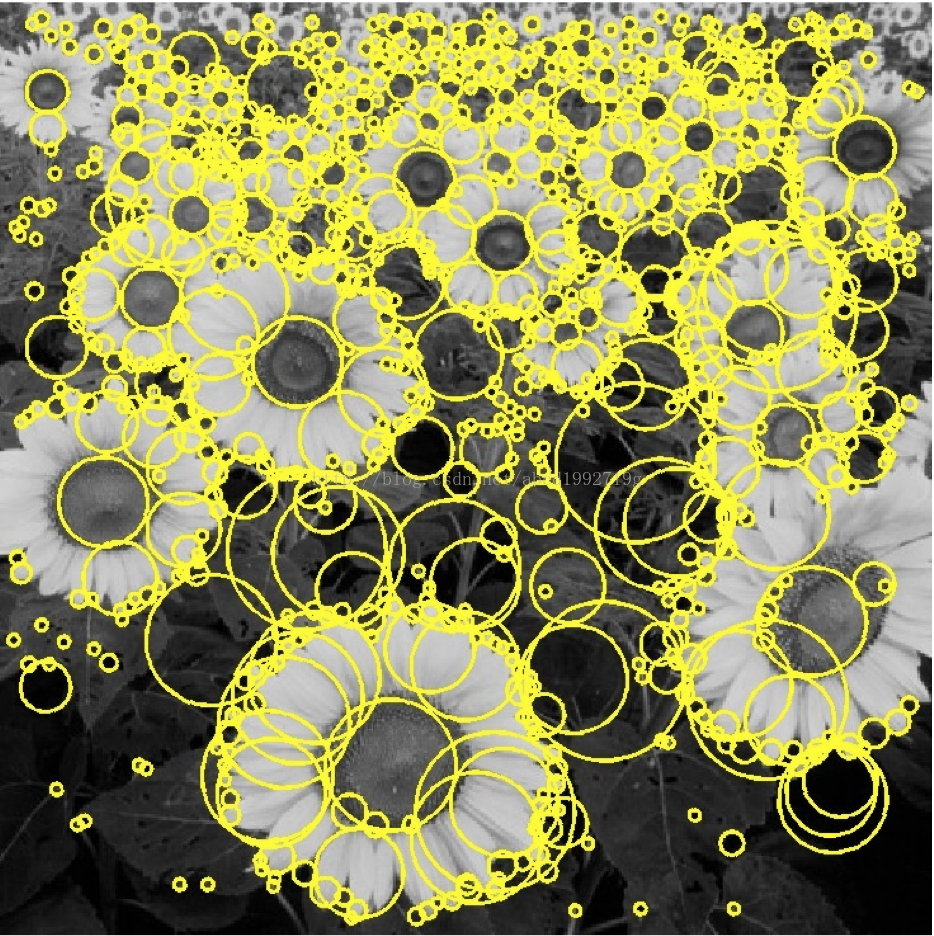

直观上来看,blob特征就是一团,一坨东西,它并不一定是圆形的,总之它就是那么一团独立存在的特征。
葵花宝典
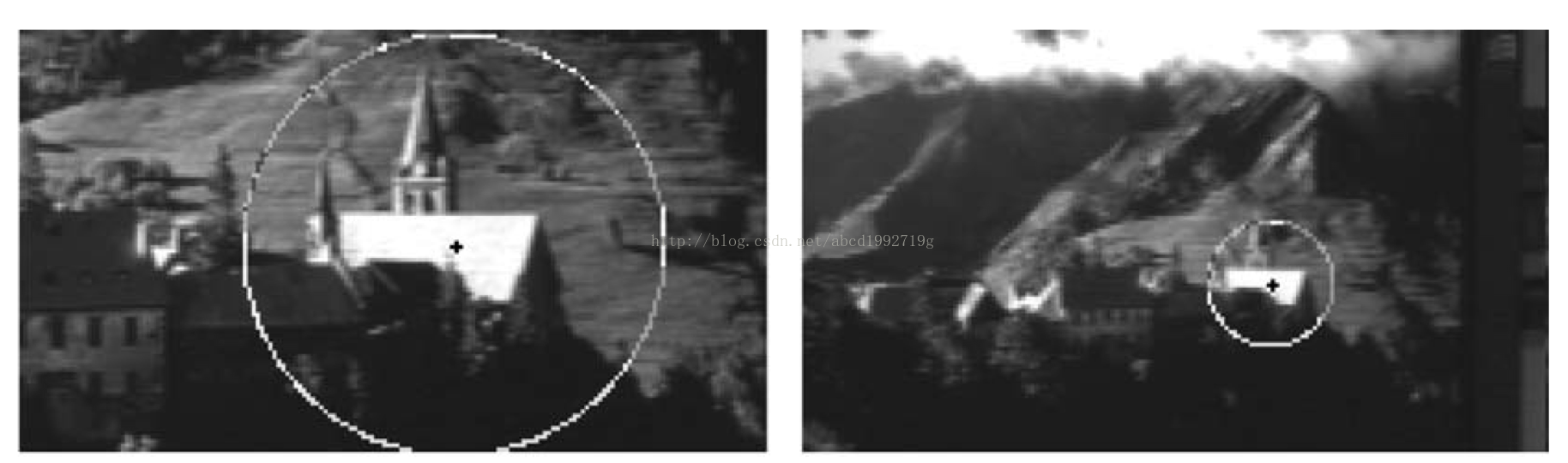
我们看待世界万物的特征跟物体的大小(scale)有很大的关系。假如当前相机镜头能清楚看到一个人,相机往后移动,那么就能清楚看到一栋建筑,再往后,就是城市,国家,地球,宇宙......
因此,我们必须对不同的scale-space进行一系列的研究,才能挖掘出特征。如下图:这样,我们就达到了一个covariant的方法,如下图。
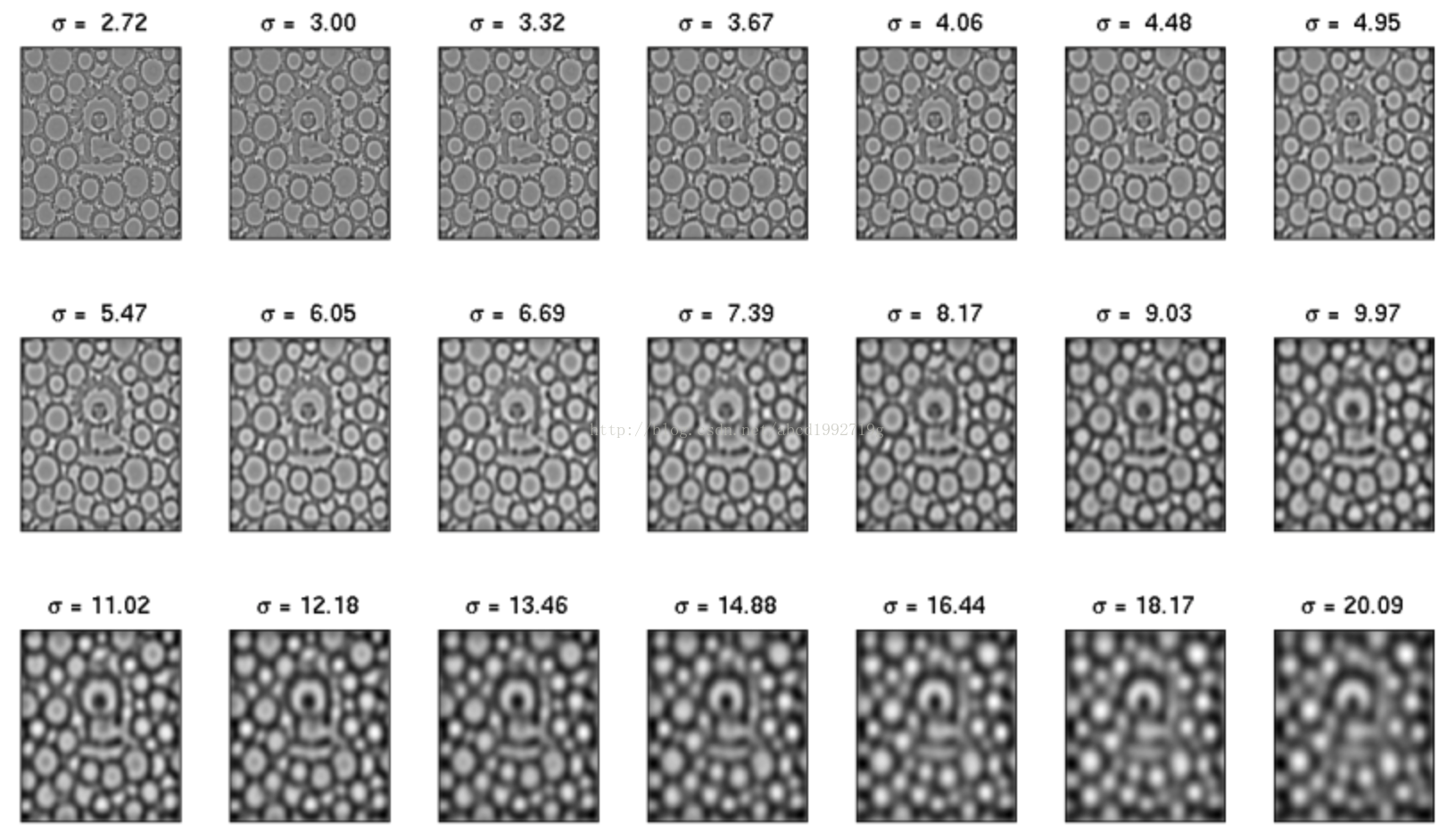
什么是scale-space?如下图。通过取不同的系数sigma和不同的核size,我们得到不同程序高斯模糊的图片,组成了scale-space.

scale-space有很多的创建方法。
在本文的实现中,我采用了log scale-space
vector<double> create_sigma(double start, double step, double end)
{
vector<double> sigma;
while(start <= end+1e-8){
double s = exp(start);
sigma.push_back(s);
start += step;
}
return sigma;
}
就生成了21个sigma
高斯窗口大小 ksize = ceil(sigma[i]*3)*2+1;
这里的3是一个比较好的取值,原因我会在下面分析(个人理解).
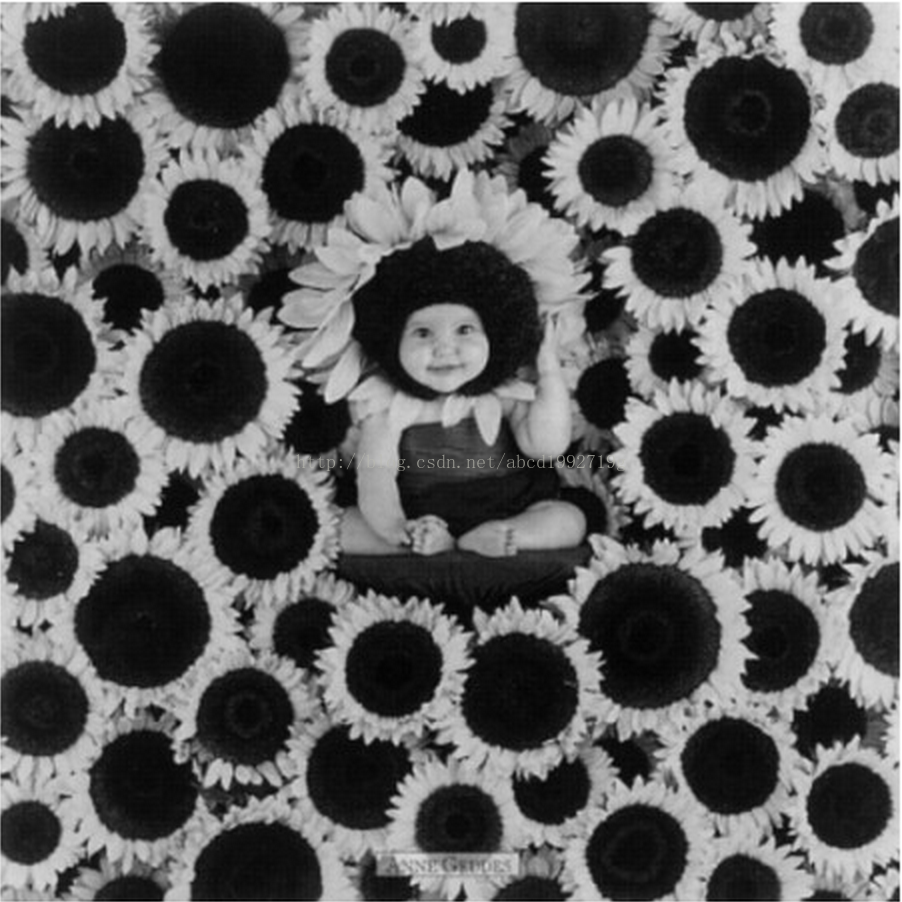 左图是原图,下面是利用上面的sigma建立出来的scale-space
左图是原图,下面是利用上面的sigma建立出来的scale-space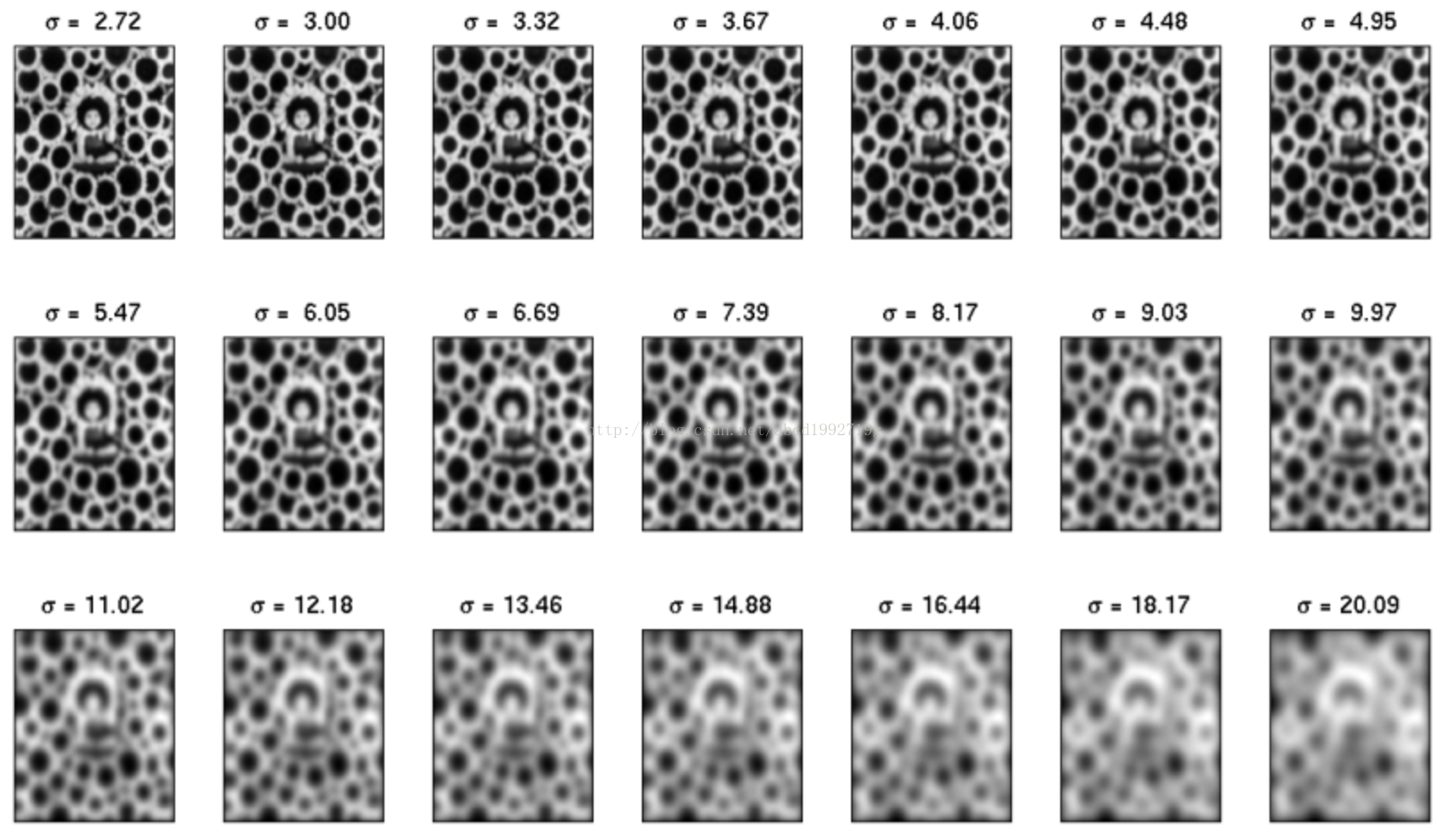
下一步,为了得到特征,我们对scale-space作用拉普拉斯算子。拉普拉斯梯度在blob的中心会取得最大值,如下图,假设拉普拉斯窗口半径介于1-2之间,那么在下面第4张图片,拉普拉斯窗口覆盖了整个短信号,使得梯度很大,因此,只要用合适的窗口在合适的scale-space操作,就能得到一系列极大值。
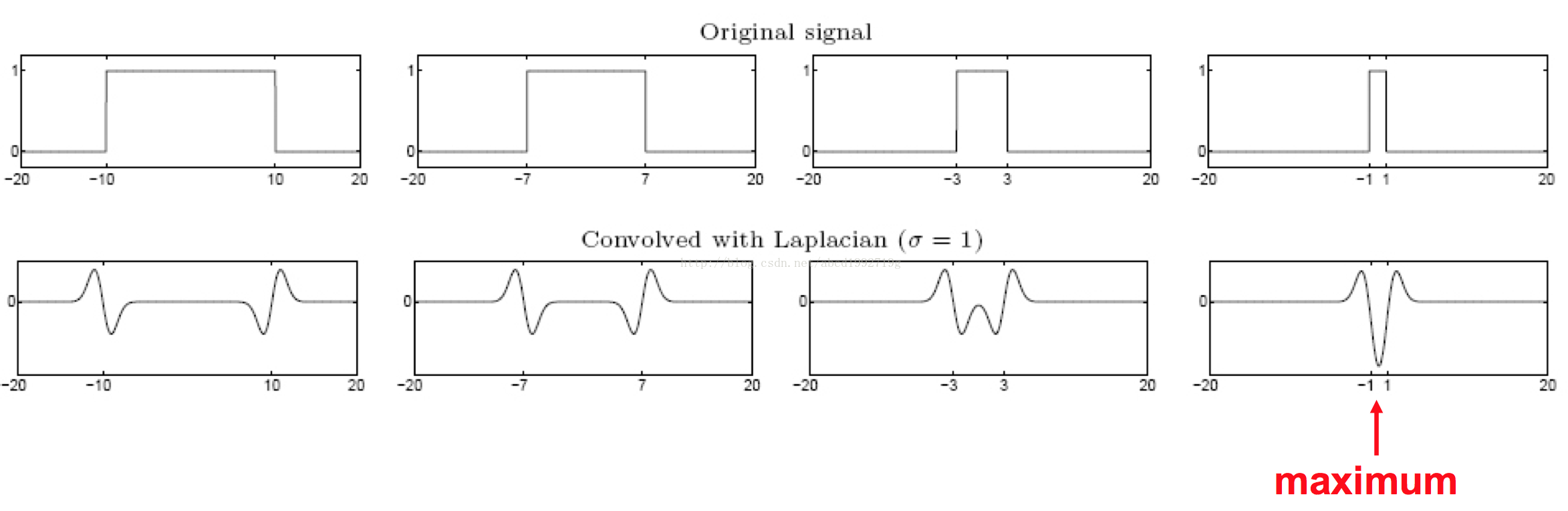
下面是经过拉普拉斯处理后的图片。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 22万+
22万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









