






图文并茂详细教程之--用pixhawk飞控组装一台F450四轴无人机(上)
原创 CJKK 苍穹四轴DIY 2019-11-15
前面的教程已经详细介绍了如何使用Pixhawk飞控组装一台S500无人机。因为很多朋友购买的是F450机架,搭配的是乐迪AT9S遥控器,由于遥控器的不同,遇到不少问题。这篇教程就作为S500机型的一个补充,着重介绍两个配置的不同之处:F450机架的组装和AT9S调试Pixhawk的部分。飞控的加速度计校准,罗盘校准,电源模块设置均和S500调试一样。需要查看S500机型组装教程请点击链接:图文并茂详细教程之——用pixhawk飞控组装一台S500四轴无人机(上)图文并茂详细教程之——用pixhawk飞控组装一台S500四轴无人机(中)图文并茂详细教程之——用pixhawk飞控组装一台S500四轴无人机(下)
一、硬件准备
F450机架:1套(含脚架)
AT9S遥控器:1套
乐迪回传模块:1个
Pixhawk飞控:1套(含飞控1个,蜂鸣器1个,安全开关1个,电流计1个,内存卡1张)
减震板:1个
M8N GPS+折叠支架:1套
2812无刷电机:4个(含香蕉头、热缩管)
20A好盈电调:4个
1045碳纤尼龙桨:4套
3S 5200mAH 30C锂电池:1个
BB响低电压报警器:1个
B3平衡充:1个
装机辅件:XT60电源线1根,JST公头线2根,尼龙扎带若干,3M胶2块,魔术贴2块,电池扎带1根,内六角工具(1.5,2.0,2.5各一只)

购买链接:https://shop111333.cn/L4bX5B
二、软件准备
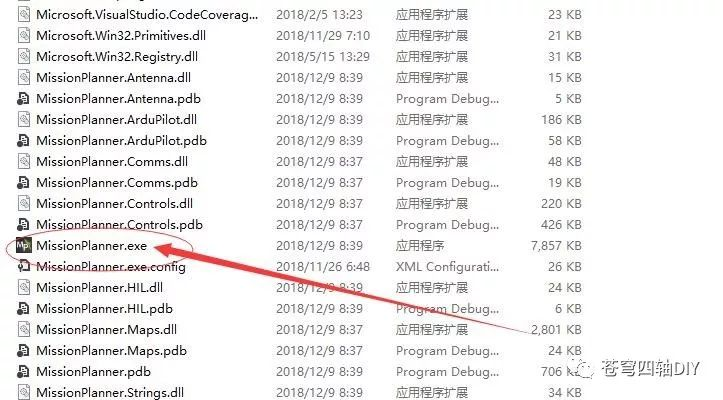
1. Missionplanner地面站调试软件(版本:1.3.62)下载链接:
这款软件是免安装版本,下载后解压。打开文件夹以后,找到 missionplanner.exe 文件,双击启动即可。
2.Mission Planner 的安装运行需要微软的 .Net Framework 组件,当系统缺少Framework插件时,有可能会无法运行,请点击下面的链接下载安装 .Net Framework4.6.11 后再启动missionplanner调试软件:
三、硬件组装
焊接部分
第一步:底板焊接
将4个电调,XT60电源线,和2根JST公头线如图所示焊接在底板上。如下所示:
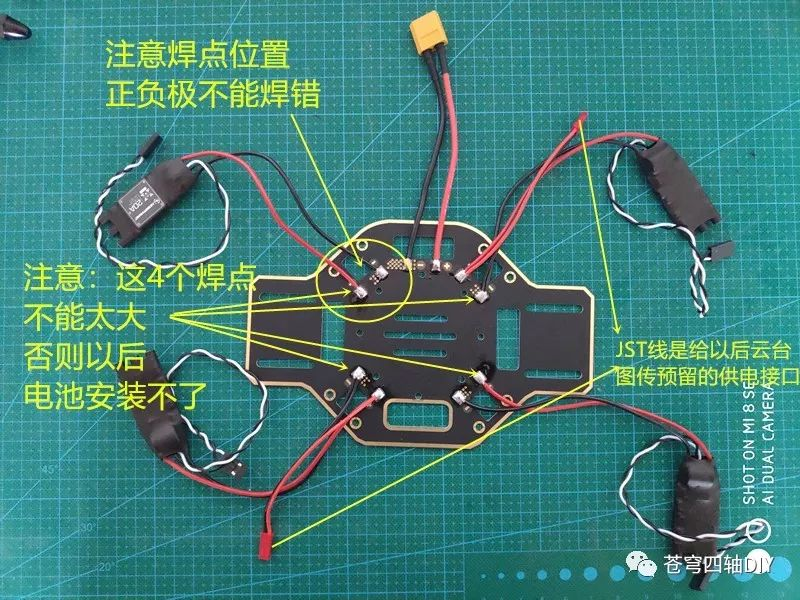
注意:
1.电调与底板之间的焊点不能虚焊。飞行器启动后电流比较大,虚焊会导致发热严重并脱落,造成飞行中的严重事故!
2.前后四个焊点(上图)不能太大,否则会阻挡以后电池的安装。
3.JST公头线作为预留给云台和图传供电的接口。以往的教程没有提及这点,在后期加装云台图传时稍显不便,需要重新焊接电源线比较麻烦。
焊点要光滑饱满,焊锡覆盖整个焊点和接线。焊接好以后用手拖拽测试是否牢固。
第二步:电机香蕉头焊接和套上热缩管
很多电机出厂都没有焊接香蕉头,需要自己焊接。香蕉头焊接也是组装过程中一个重要的地方。香蕉头焊接不好,通电后会导致电机缺相烧毁。
香蕉头用纸巾包裹好,夹在老虎钳上。用纸巾的目的是防止焊锡里面的松香融化后流到插头部分,会造成接触不好。焊接时先将焊锡融入香蕉头内并填满,然后再插入电机线。如下图所示:

焊接好冷却后,用手拖拽测试是否牢固。
确认没有问题,就可以将热宿管套上,用热风枪或则电吹风高温档或则打火机,吹烤包裹部分。使其紧贴。如下所示:


2812电机焊接好香蕉头如下:

机架组装
1.将电机固定在机臂上。注意:用机架里面配套的银色大螺丝安装电机。如下所示:

2.用机架里面的银色小螺丝将机臂固定在底板上,螺丝先不用拧得太紧,方便后面调节,如下图:

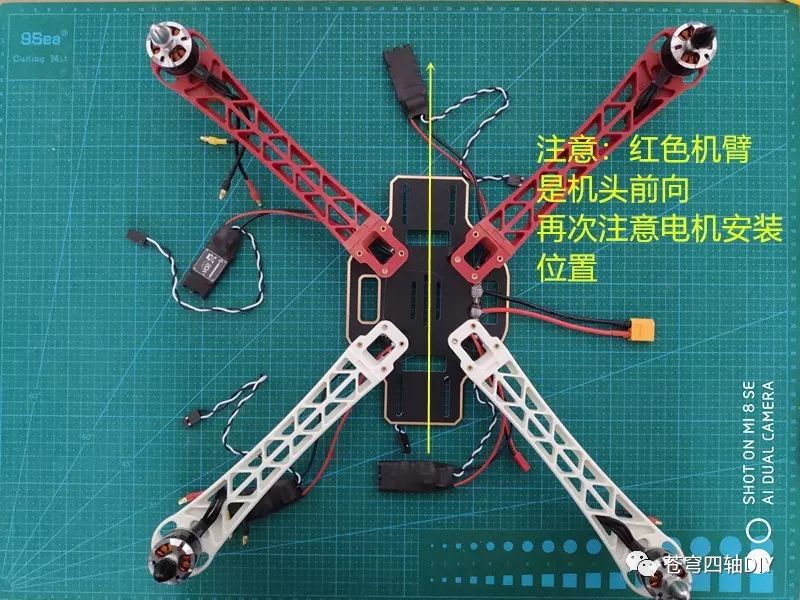
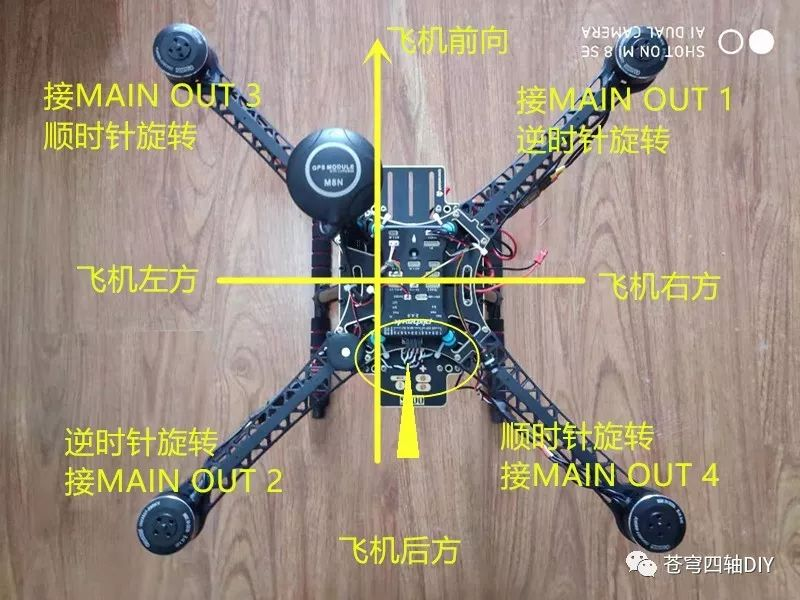
注意:银色头电机和黑色头电机的安装位置不能装错!!!
银色电机螺帽是反丝,以后是顺时针旋转;黑色电机螺帽是正丝,以后是逆时针旋转,这样安装以后才不会射桨!
3. 安装机架上板
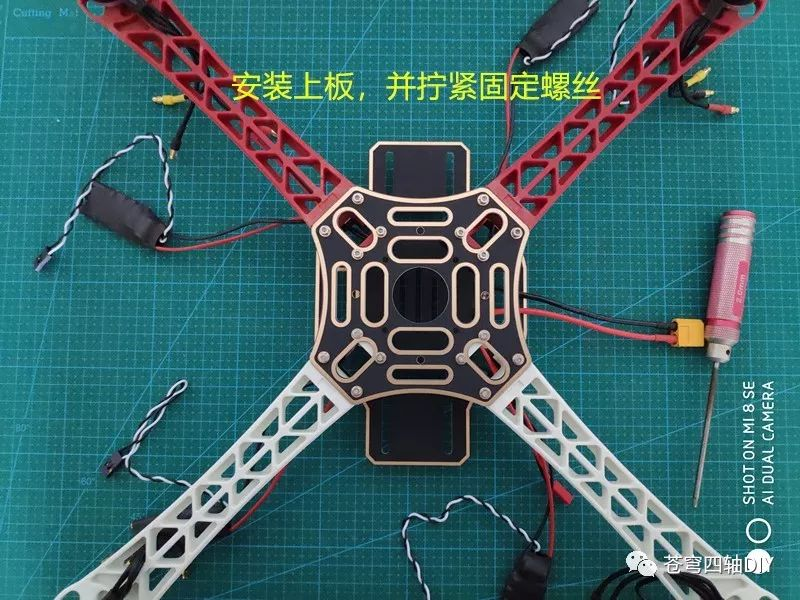
4.上板安装好以后,再拧紧底板螺丝!紧固所有螺丝。
5.连接电机与电调
将电机焊接好的香蕉头分别插到电调的3个香蕉头里面
注意:先任意连接。要无人机正常飞行对电机的旋转方向是有要求的。但做到这步电机还无法启动,等后面飞控调试好以后,我们再来调整电机的旋转方向。
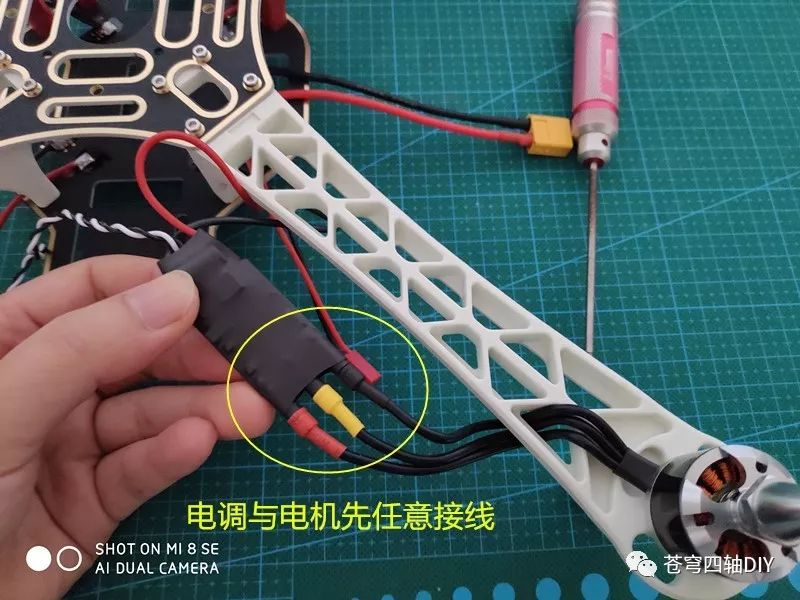
四个电机和电调都要分别接好。
飞控及配件的安装和接线
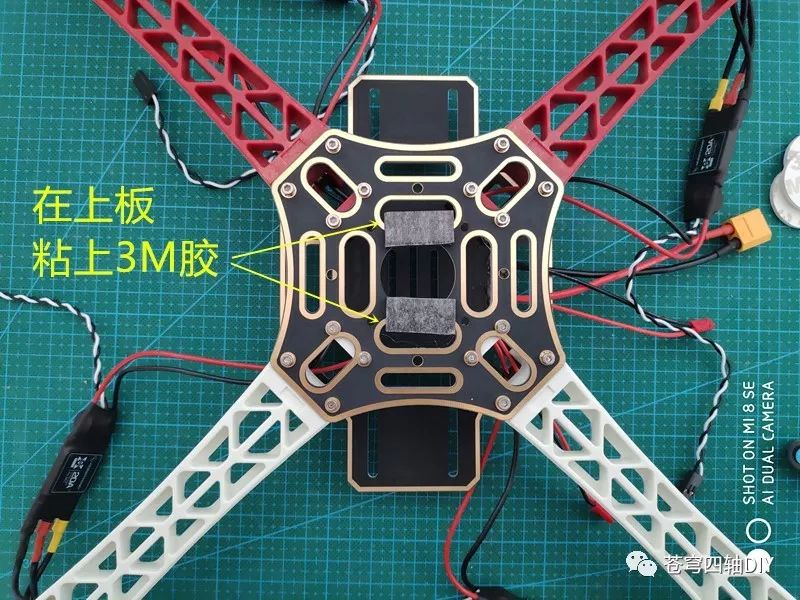
1.安装减震板
先把减震板和减震球组装好,小技巧:先将减震球安装于小板上,然后再连接大板。注意:减震球不可用尖锐的工具安装,减震球破损后就没有减震的功能了。

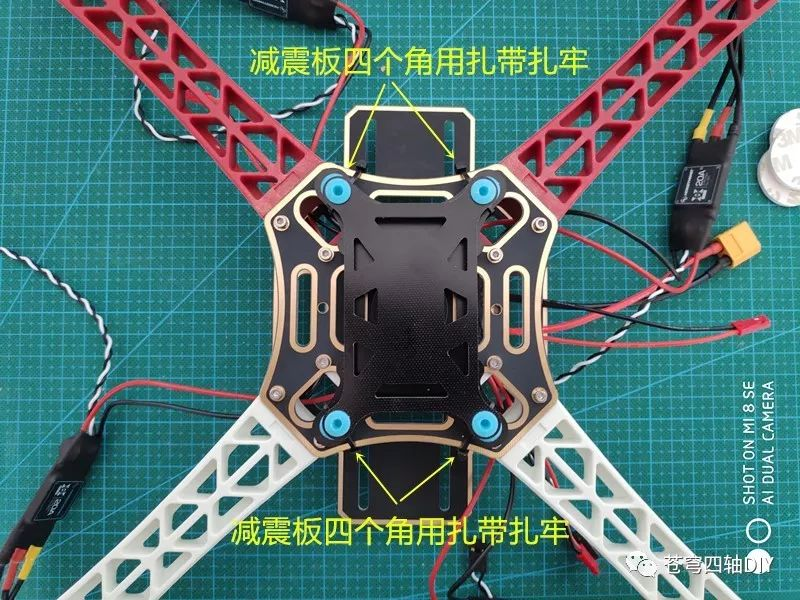
取一块3M胶,将减震板粘在机架上板中心。可在四个角用尼龙扎带绑扎一下,进一步加固减震板。
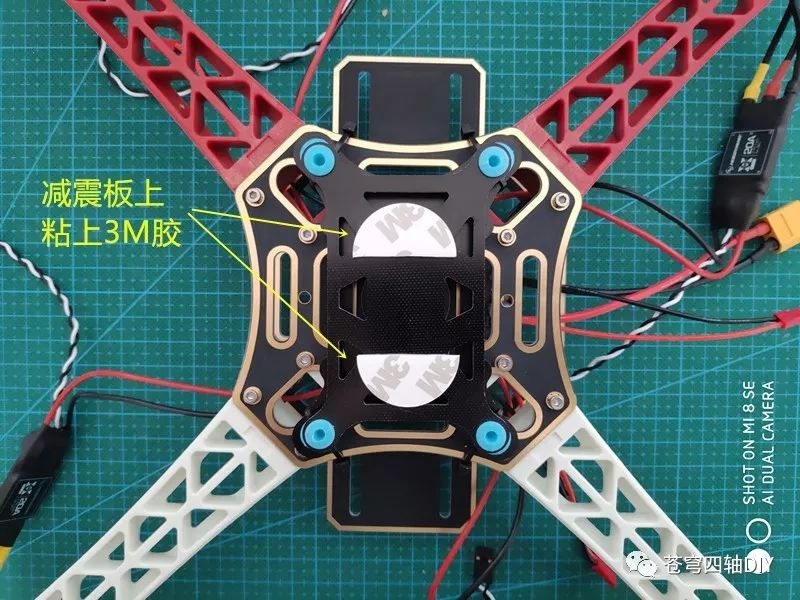
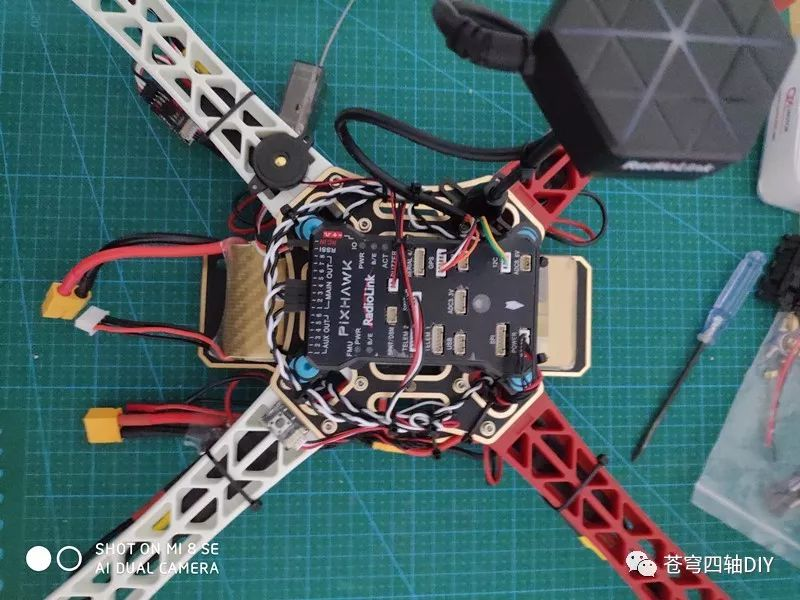
2.用减震板里面的3M胶将飞控粘贴在减震板上。注意:飞控的箭头前向就是无人机的机头前向。明确机头前向很重要!涉及到后面电机的旋转方向,GPS安装方向和飞行时的前向的确定。我们以红色机臂方向为机头方向。
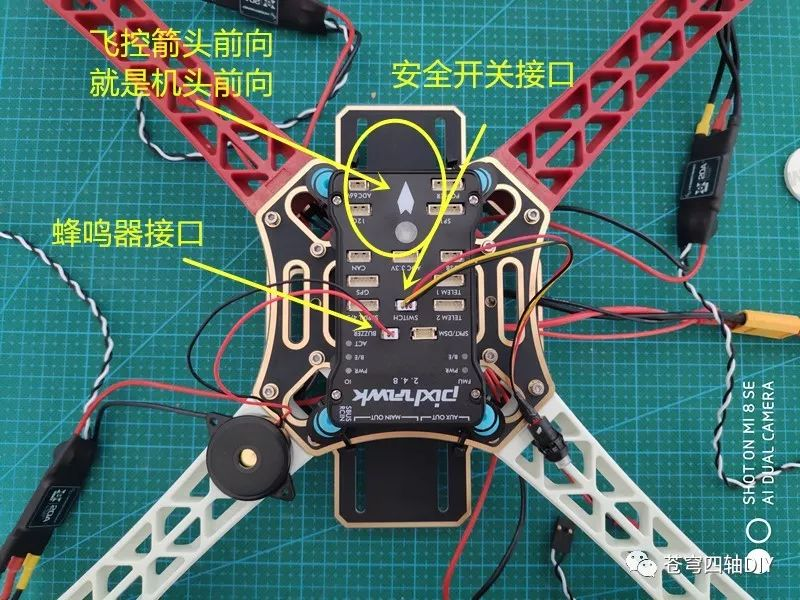
飞控要安装内存卡(PIX2.4.8发货前已经安装好内存卡)、蜂鸣器、安全开关(内存卡用于记录飞行时的数据。蜂鸣器会根据飞控输出不同提示音。安全开关是一个硬件保护措施,防止意外解锁电机转动造成伤害)
3.安装电流计(电流计的作用是给飞控提供稳定的5V电源,并且测量电池电压和电流)

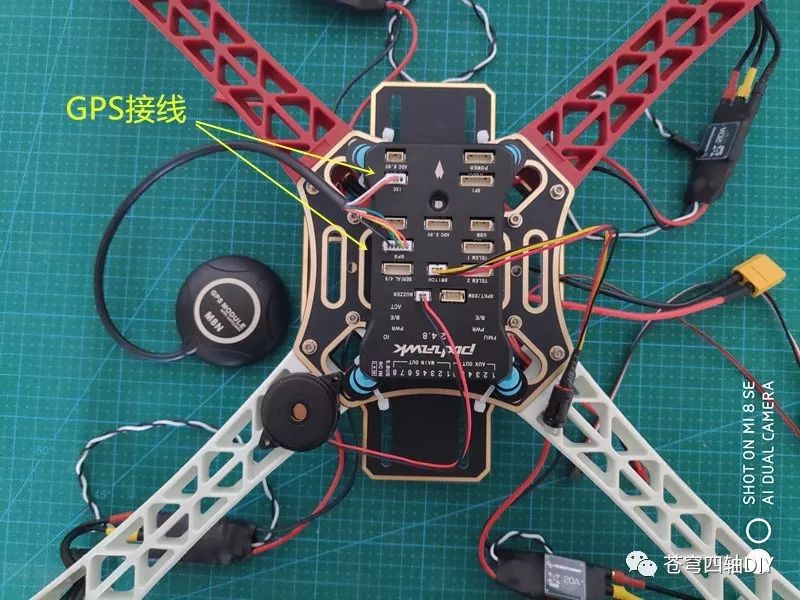
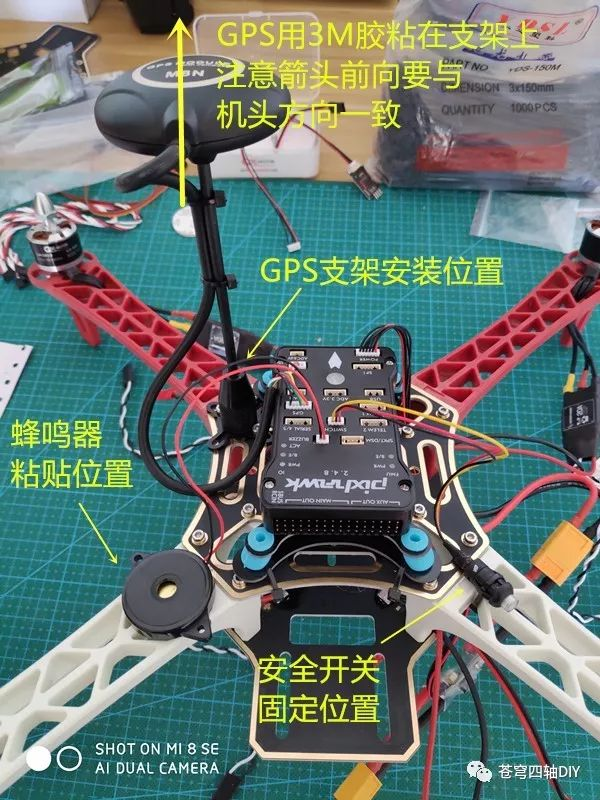
4.GPS模块的安装(注意:GPS的箭头前向一定要和机头前向一致,因为外置罗盘是集成在GPS模块里面的,如果安装方向不对,会出现罗盘不一致警报无法解锁。)
5.电调接线。按照下图上面的电机标识,将电机对应的电调连接到飞控主要输出口(main out)1~4通道。电调线从机臂之间穿过到飞控后方。注意:main out接口是从右边开始第7针脚开始(前面是AUX1~AUX6辅助接口)
电调连接飞控的顺序不能接错。否则会导致飞机解锁推油门就翻跟斗。

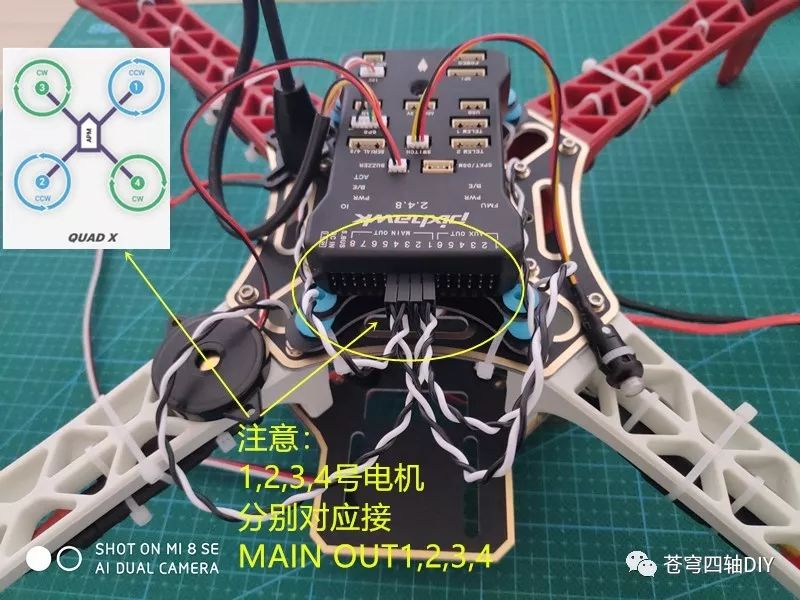
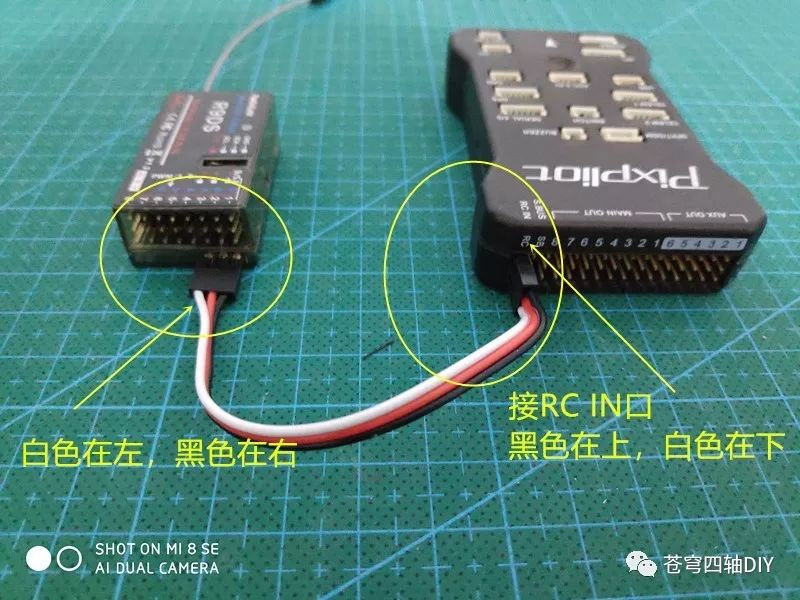
和S500机架的接线一样,注意黑色负极在上,白色信号在下:
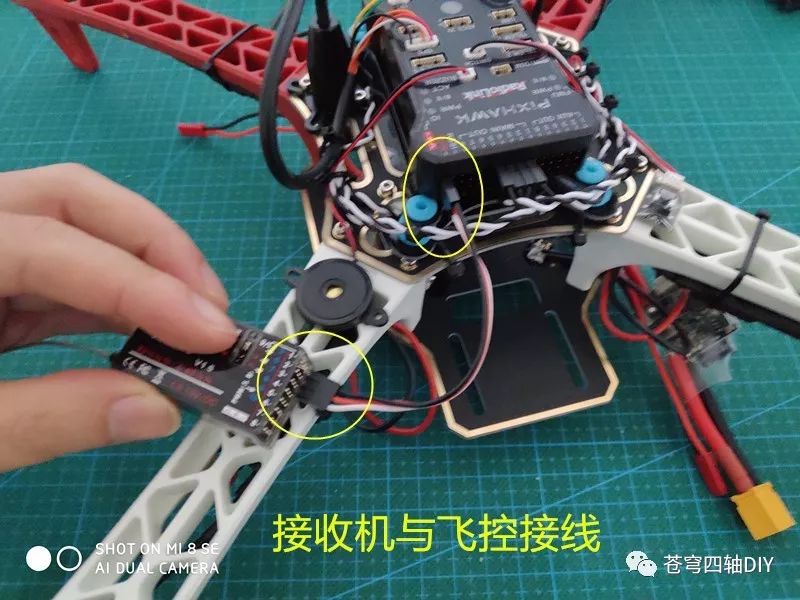
6.接收机的接线
7.回传模块的接线

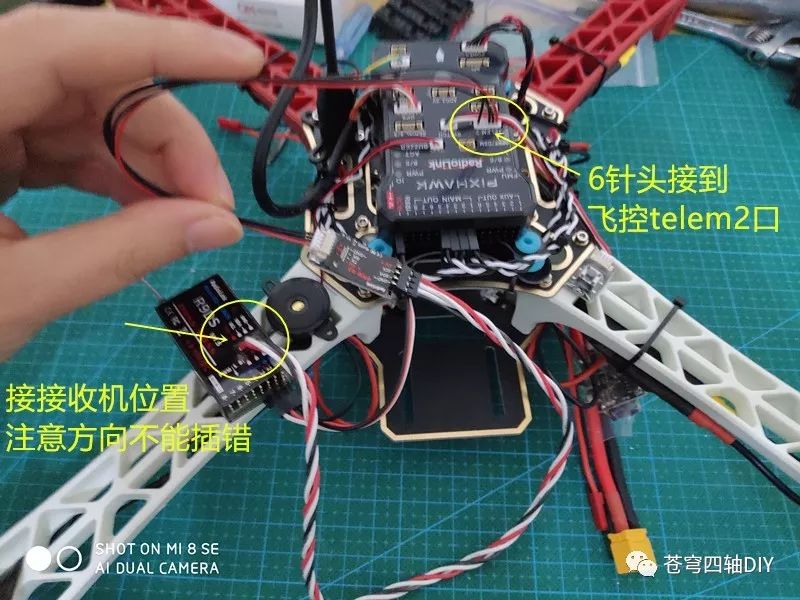
回传模块一头连接飞控Telem2口,一头连接接收机。注意接线方向。
这样飞机起飞后遥控器就能接收到飞控实时回传的数据。连续按2下遥控器左下角的END,就能看到相关参数。
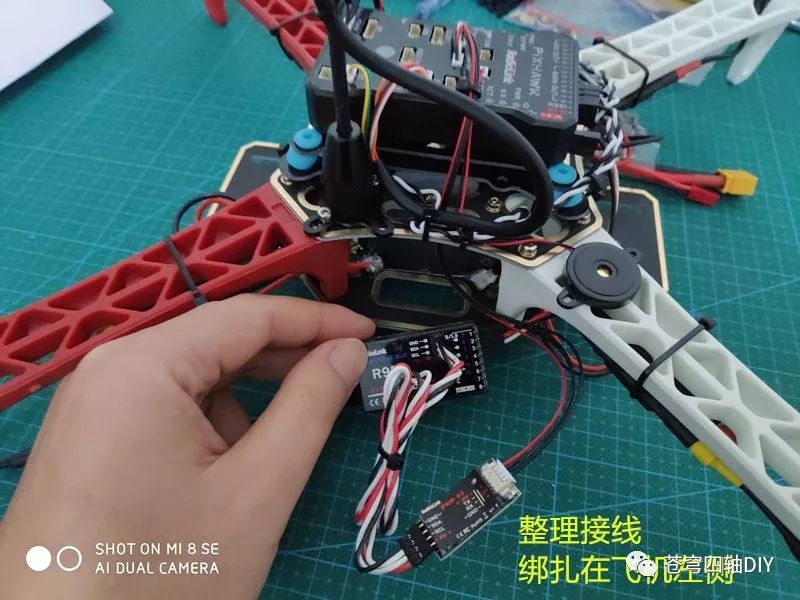
整理接线,将接收机和回传模块置于飞机左侧,先不用绑扎,后面还需要调试。
8.电池的安装
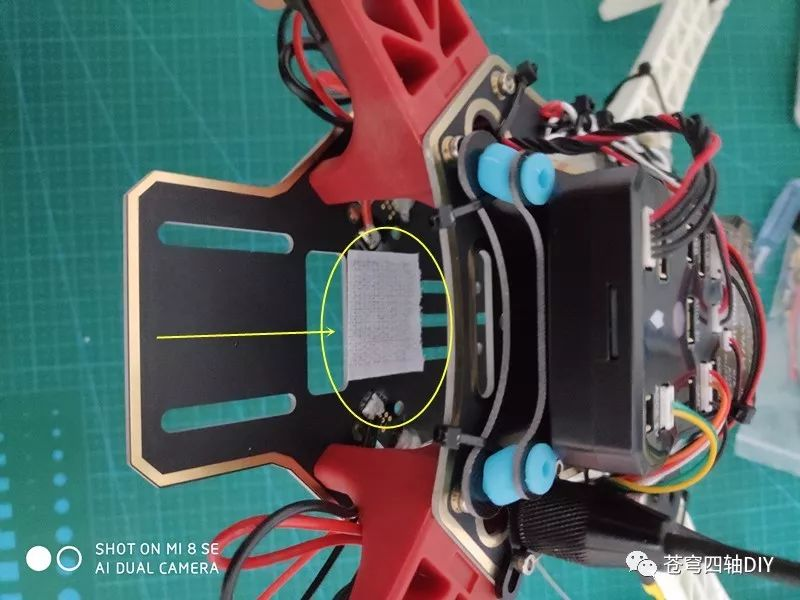
剪一块魔术贴的针面,粘在飞机底板的前端位置,如上图所示。

电池上粘魔术贴毛面
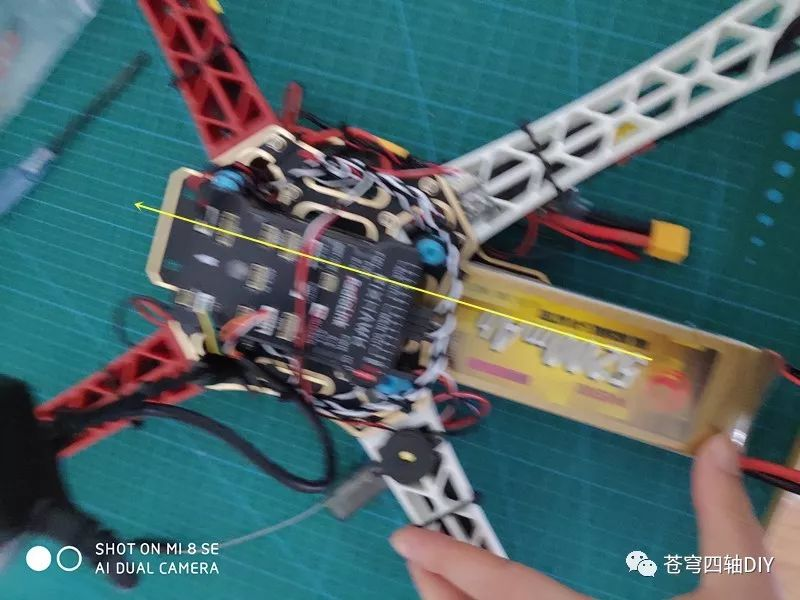
电池从机身后端往前塞进即可。如果前面说的底板焊点过大,就有可能阻挡电池安装,请调整。还有一个方法是将底板翻过来安装,将焊点一面朝下。具体根据自己的安装情况调整。
安装好电池的样子
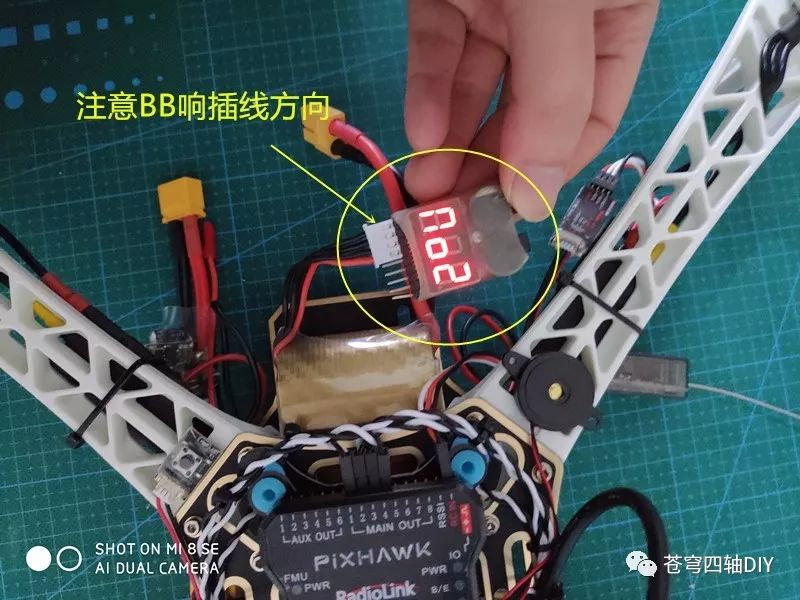
最后将BB响报警器插到电池平衡头上,注意插线方向不要弄错。否则不会显示。
BB响低电压报警器:主要作用是提醒操作者电池电量较低,需要充电。在飞机飞行的时候需要一直插在电池上。BB响报警器连接后,会显示循环显示:ALL表示电池总电压,NO1,NO2,NO3分别表示3片电芯的分电压。比如我们用的是3S电池,就是由3片电芯串联的,充满电的总电压是12.6V左右,也就是单片电芯满电压是4.2V;总电压放电到10.8V左右,也就是单片电芯电压放电到3.6V就需要充电。锂电池不能完全放完电才充电,这样锂电池就损坏了无法修复。大家使用中一定注意!
BB响两个喇叭之间有一个小按钮,是设置报警电压的,发货时我们设置好单片电芯3.6V报警。不需要再设置。
当然我们的遥控器也有低电压报警提示功能,这个会在后面介绍。
9.整理绑扎接线
接线完成后,用尼龙扎带将模块的连接线绑扎好。尽量做到简洁美观。一方面避免以后桨叶打到,一方面减少震动和异响。另外,由于电机还没有调试方向,电调暂时不用绑扎。后面教程中我们会讲具体如何调试。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









