







本内容是pixhawk飞控组装在F450的组装内容,内容包含了组装的步骤以及注意事项,可以帮助到刚学习组装F450的基础小伙伴。
事项提醒:组装飞机时需要注意图片中画圈的位置,以及图片下内容的提示,这样可以避免后面调试时出现的报错内容。
一.准备相关配件

二.机架的组装与焊接
2.1;分电板的焊接
需要准备分电板.电调.XT60接头.JST接头(这个焊接上可以作为预留电源接口使用)
如图所示:
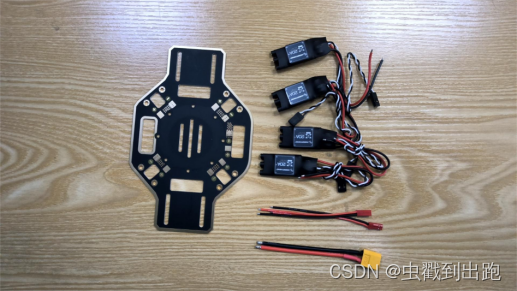
注意事项:焊接时不要出现虚焊(可以用手轻微拽一下,不掉就可以)与注意板子上的正负极(+正极,—负极)。
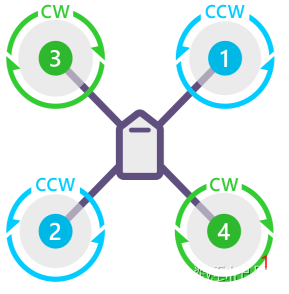
2.2;电机安装
需要准备机臂.电机.M3x9螺丝.如图所示:

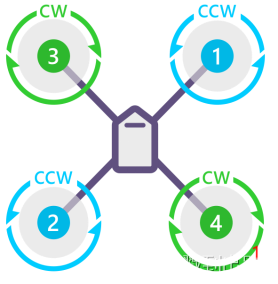
注意事项:安装时需要区分一下电机型号CW与CCW,安装时两种不同颜色的机臂分别安装一种型号的电机。



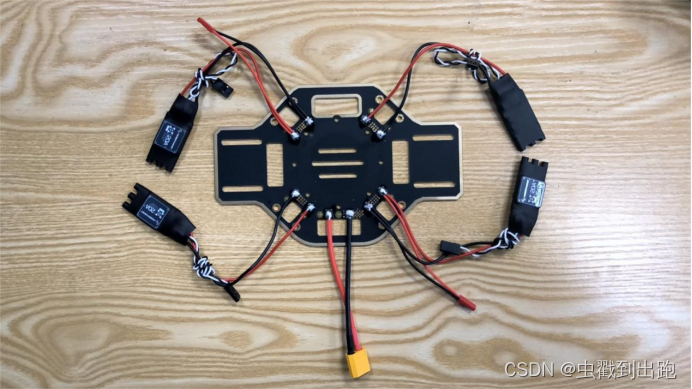
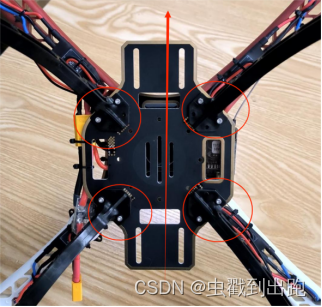
2.3;机架组装
需要准备组装好的机臂.焊接好的分电板.上顶板.M2x8螺丝.

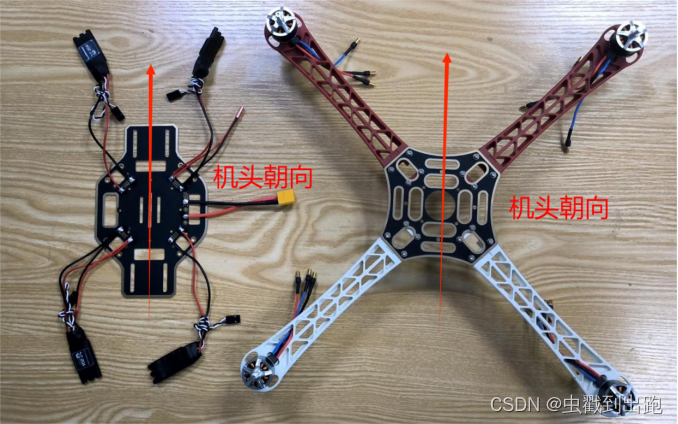
首先安装机臂与上顶板(机臂位置与图1对照)

注意事项:这里最好机臂颜色挨着,为了后面区分机头与机尾方向。

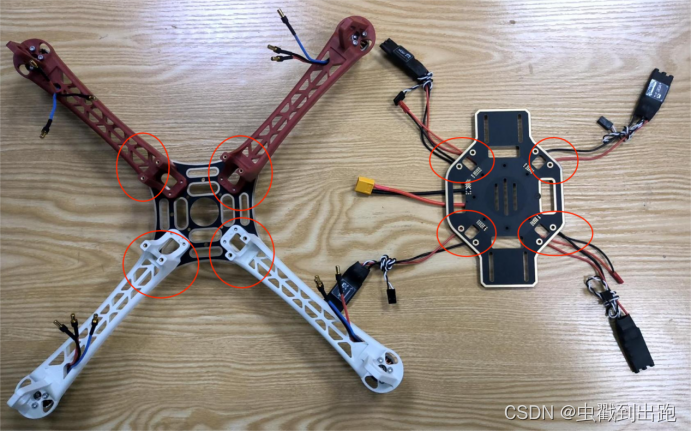
机架安装图1;电调安装接线图2图电调接线顺序可以与图中一致。再将电调困扎。


困扎示意图


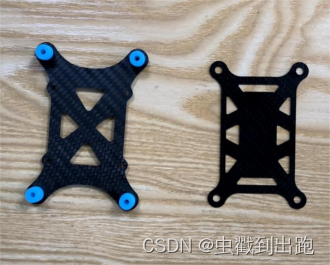
2.4;配件安装
需要准备减震球,减震板,飞控,机架

先组装减震板:

再进行组装:




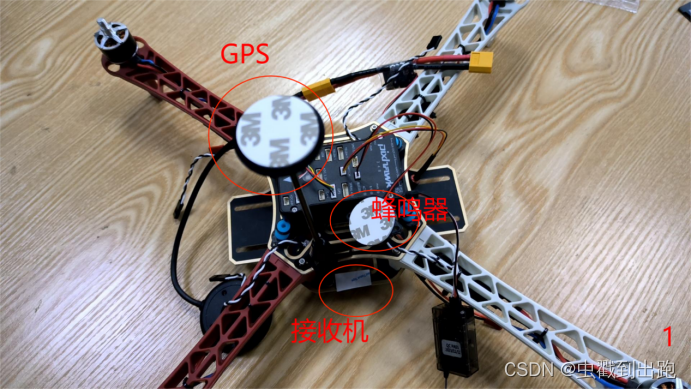
GPS支架安装(将图1标注螺丝拆下再固定安装):


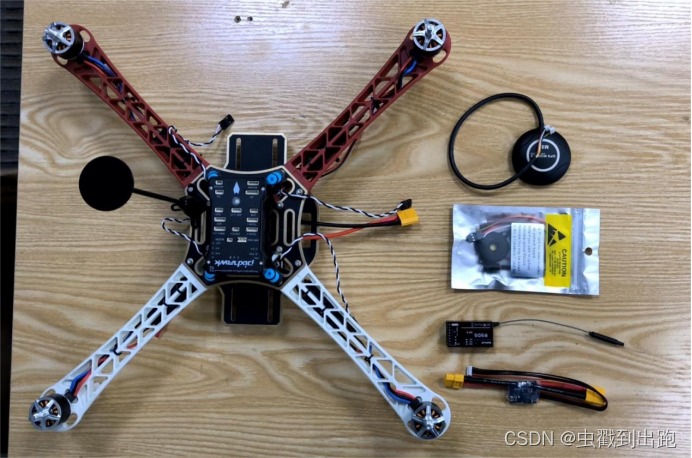
2.5;接线连接
需要准备组装完成机架,配件包,GPS,电流计,接收机。
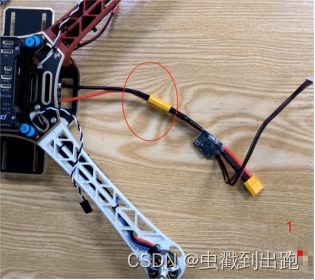
1.电流计(与xt60接头连接并将6针接头接在飞控POWER串口):

2.配件包(蜂鸣器接在飞控BUZZER,安全开关接在SWITCH):


3.GPS(6针接头接在飞控GPS串口,4针接在12C串口)


4.接收机(配件包里3PIN接头用于飞控与接收连接再RCIN接口):


注意事项:绿色为富斯接收机。黑色为乐迪接受机
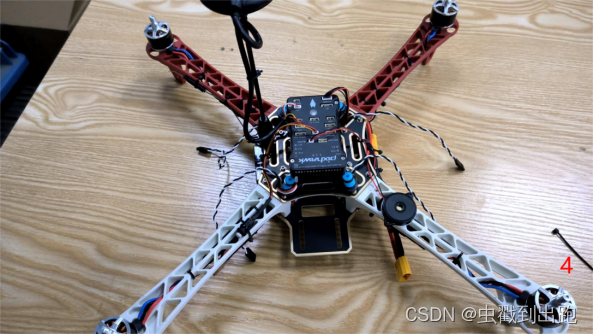
5.将所有物件粘贴与困扎:


6.电调接线
电调我们以图1电机顺序为例,图1中的1234号电机按照顺序接在飞控的MAIN OUT的1234接口并按照1234的接线顺序接线,黑色线在上。

7.困扎

三。脚架安装
需要准备分安装好的机架,脚架,M2x10螺丝。



内容总结:
组装注意事项:
各位组装学习的小伙伴们,无人机在组装时需要先学习了解一下部件名称,学习部件连接位置(例如:电机连接电调,电调连接的时飞控),在组装时需要做到不随意接线,不接不知道的线,注意焊接的事项(不虚焊,不胡乱焊接),每种不同的螺丝都有对应的安装位置,拧螺丝时注意力度的控制。
其他事项:
使用工具需要对应,不随意使用与工具不相干的事。不随意拽线,以免造成线的损伤。

















 4594
4594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









