







上一篇教程详细介绍了F450硬件的组装过程,接下来重点介绍飞控的调试部分。开源飞控因为其自身硬件的复杂性,固件的多样化,并不是一下就能搞懂的。需要逐步学习,才能理解其中的使用方法。所以在进行飞控的调试前,请大家先仔细看下图了解飞控的接口。在不熟悉的情况下,千万不要想当然的接线。错误的接线会导致飞控工作不正常甚至烧毁。
一、资料下载链接
F450 调试内容
Missionplanner1.3.74 地面站软件下载链接: https://pan.baidu.com/s/1ub2XQJ7YGztYZGEwaKLTjQ提取码:x452
地面站软件是 Pixhawk 无人机组装调试最重要的工具
注意:电脑最好是使用 Win10 系统,Win10 以前的系统可能由于缺少必要的插件会导致启动失败
Ardupilot(4.1.0)固件下载链接:
https://pan.baidu.com/s/1P2wxKxNYV1nWzeKraLoVBg提取码:a7cl
固件可以理解为刷写到飞控的控制程序
注意:无人机发货前已经组装调试好,不需要再下载固件,此固件可留着备用。
地面站无法识别COM 口通过安装 Arduino IDE 的方法来安装驱动;链接: 百度网盘 请输入提取码
提取码:cjgw
Arduino IDE 安装完成后,再连接飞控查看是否能够正常使用。
二、固件刷写安装
1.准备一根安卓数据线,一端连接飞控,一端USB 接口连接电脑。
2.打开地面站.

3.来到初始设置-选择安装固件(第二个是安装我们自己下载的固件,此时地面站会加载一会儿)-加载自定义选项-选择我们下载的固件版本。
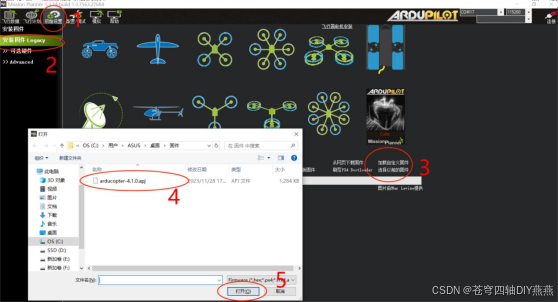
4.此时会有提示-我们选择 OK-拔掉 USB 接口并在 3S 后插上-此时等待进度调完成(飞控会出现交替闪烁蜂鸣器也会响)-拔掉数据线并再次插上重启飞控-此时飞控固件就刷写好了。
三:机架类型设置

1.飞控连接地面站以后,点击 初始设置 页面会多出 必要硬件 菜单,选择 机架类型 ,然后分别点击下图所示的 3、4:
注意:新版固件如果不设置机架类型,就会警报: check firmware or FRAME_CLASS
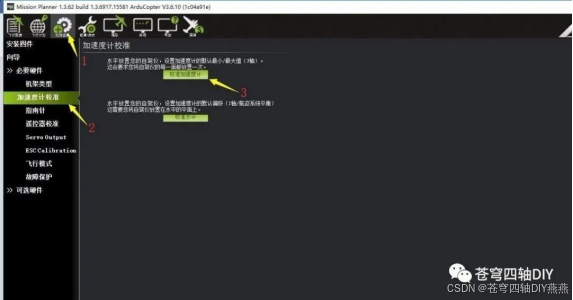
四:加速度计校准
点击 初始设置 页面,点 加速度计校准
在做 加速度计校 准前,将飞机水平放置。校准过程会执行 6 个动作,每次按电脑回车键或则空格键确认,点击 校准加速度计,如下所示:
- Place vehicle level and press any key(水平放置)完成后回车
- Place vehicle on its LEFT side and press any key(向左边倾斜放置)完成后回车
- Place vehicle on its RIGHT side and press any key(向右边倾斜放置)完成后回车
- Place vehicle nose DOWN and press any key(向下放置)完成后回车
- Place vehicle nose UP and press any key(向上放置)完成后回车
- Place vehicle on its BACK and press any key(反过来放置)完成后回车
校准完成,会显示 calibration Successful。
如果校准失败,请重新校准。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5073
5073

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









