






自动驾驶控制算法 -车辆动力学模型
在自动驾驶车辆控制中,车辆模型的建立和分析是进行控制器设计的基础,在之前我们详细介绍了车辆在全局坐标系和道路坐标系下的运动学模型
附赠自动驾驶最全的学习资料和量产经验以及1000T的资源分享:链接
但在实际的车辆控制过程中,某些场景下车辆的动力学特性不能忽略,比如高速场景、转弯场景等,都需要对车辆的动力学模型进行有效地建立。为此,本文将分别介绍车辆在全局坐标系和道路坐标系下的动力学模型,为后面的控制器分析设计提供依据。
1. 全局坐标系下的车辆动力学模型

图1 车辆动力学模型
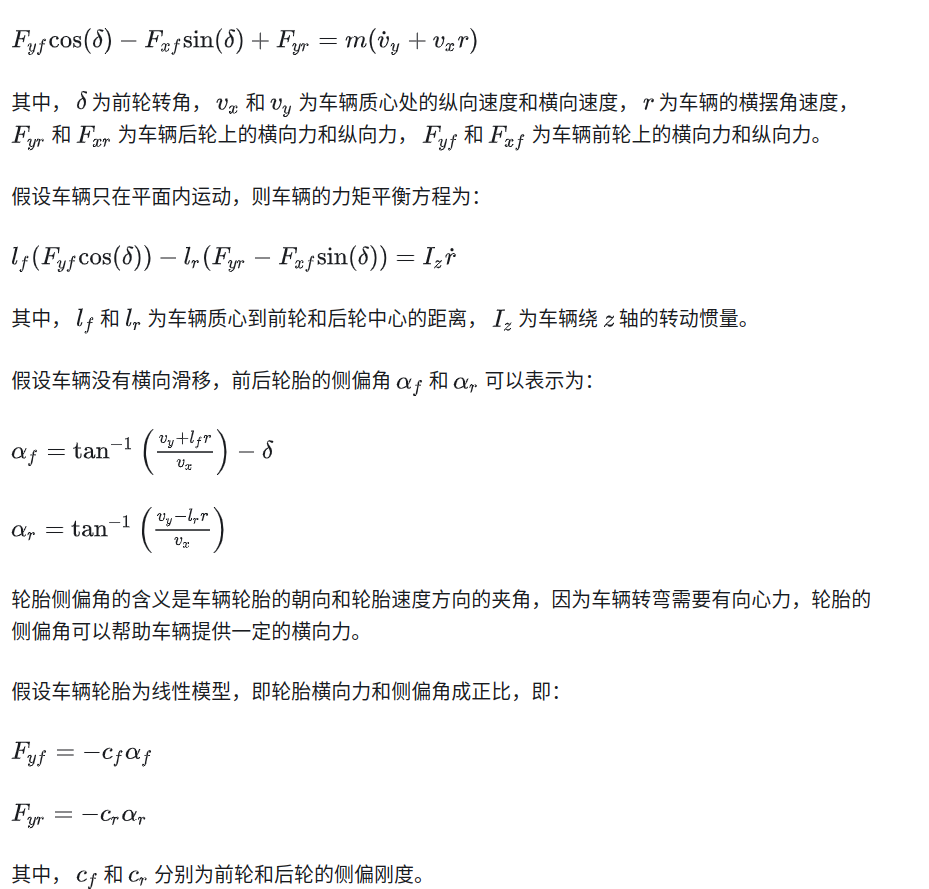
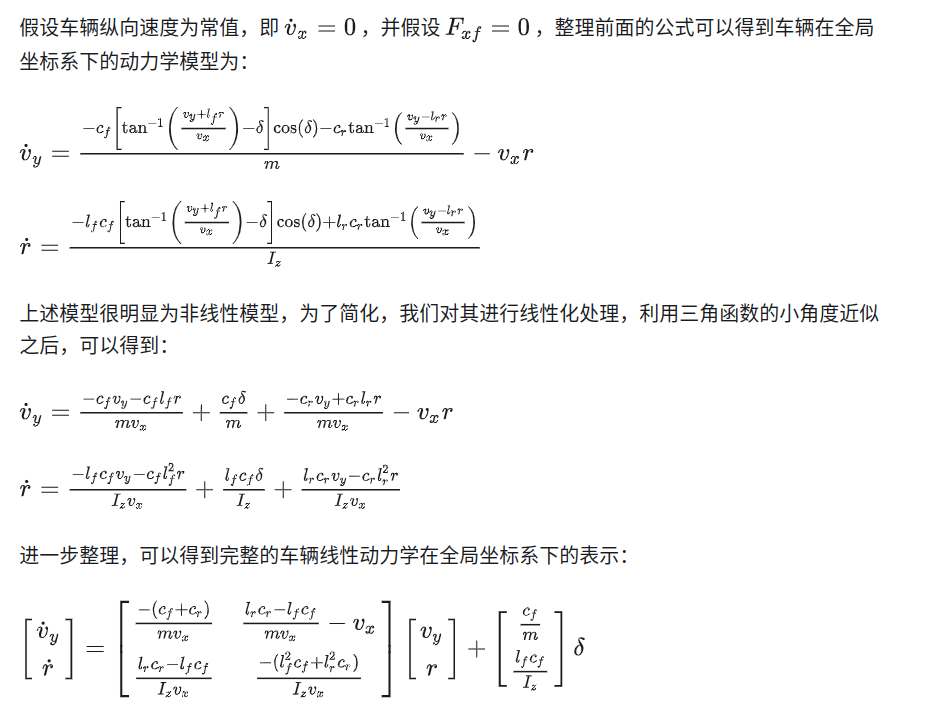
在进行车辆动力学建模时,车辆上的横向力将是重点关注的问题。在这里假设纵向车辆速度是单独控制的,在给定车辆质量 m 的情况下,将图1所示的车辆侧向力相加,得出:
2. 道路坐标系下的车辆动力学模型

图2 道路坐标系下的车辆动力学模型
在道路坐标系下进行动力学模型的建立,将会有助于我们进行模型分析和控制器设计,如图2所示为车辆在道路坐标系下的动力学模型。同样假定纵向车速恒定,则车辆横摆角速度可表示为:
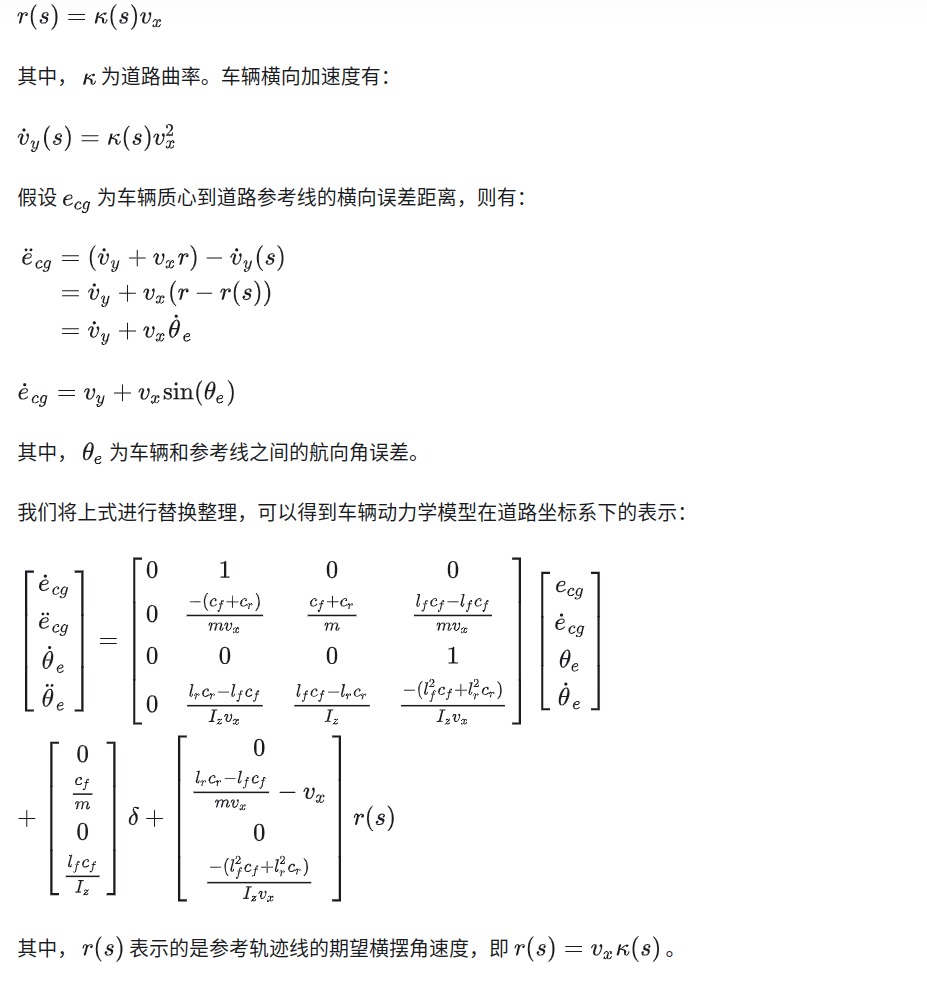
至此,我们得到了车辆动力学模型在全局坐标系和道路坐标系下的方程表示,在后续的自动驾驶车辆控制器设计分析中可以根据需要进行选择使用。
参考文献:
- [1] Snider J M . Automatic Steering Methods for Autonomous Automobile Path Tracking[J]. Robotics Institute, 2011.















 766
766











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









