






1、运动学方程对比动力学方程
有了运动学方程就可以做相应的控制算法。但是实际上很少用运动学方程做,因为简化的太多了(假设太多),并且运动学方程是非线性的,v(纵向速度)和δ(前轮转角或方向盘转角)是耦合在一起的,不是解耦的。
动力学方程是考虑了轮胎的特性,在选取Frenet坐标系时,可以将纵向控制和横向控制解耦。
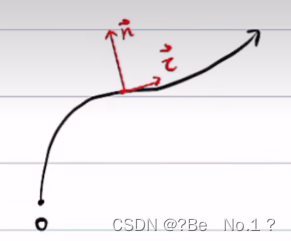
s、v与aτ相关,aτ与油门/刹车直接相关,可以通过控制油门/刹车来控制aτ,通过aτ进行纵向控制。因此,在纵向控制里只需管油门和刹车就可以了不用管方向盘。
an与v,δ有关,横向控制依赖于纵向控制和方向盘,当纵向控制稳定以后,v变化不大,所以an(横向控制)只与方向盘有关。
2、动力学方程
采用二自由度车辆动力学方程,因为经典,化繁为简,纵向控制假设是常数(即纵向的速度为常数C)只管横向控制,符合我们分开控制的思路。而且是在牛顿第二定律受力分析基础上加上了轮胎变形的考虑(比运动学考虑的多)。
2.1、轮胎的侧偏特性 (轮胎变形的术语)
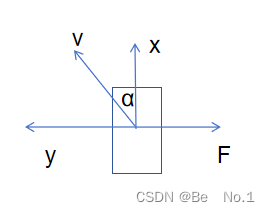
定义F=Cα,α是侧偏角,F是侧向力。
C是侧偏刚度(反映轮胎软硬程度的物理量 )是轮胎的一个基本属性,做实验得到的值(等价于一个特殊的弹簧是线性关系的,但实际上轮胎是橡胶,并不是一个理想弹簧),侧偏刚度和轮胎的垂向力息息相关,这里认为侧偏刚度是一个常数。
左图是正的侧向力得到负的侧偏角,右图为负的侧向力得到正的侧偏角。
因此,侧偏刚度一定是负的。
tip:侧向力是除地面以外的物体对轮胎产生的力,侧偏力是由侧向力引起的地面侧向反作用力
2.2、动力学方程的构建
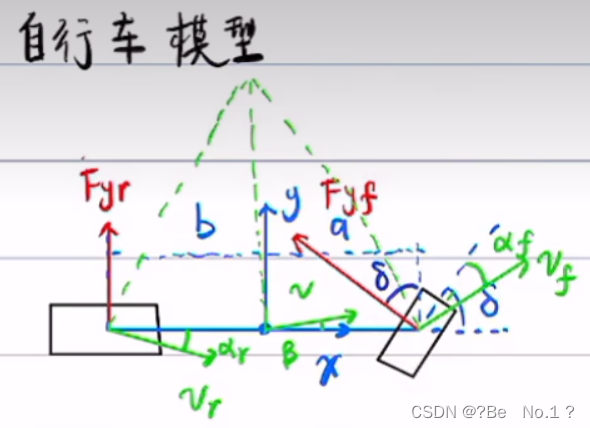
上图的两个方框是车的(自行车模型)前后两个轮子,两个力F都是侧向力,δ是前轮转角,一般汽车的后轮是不转向的,则后轮的方向和车的轴线(车身坐标系的x轴)基本上是一样的(后轮转角为0°),αr是前轮侧偏角,αf是后轮侧偏角。
第一个方程是受力分析方程(牛二),第二个方程是力矩方程(力矩向量 = 距离向量×F = 转动惯量乘以角加速度)。一般假设前轮转角δ较小,所以cosδ ≈ 1。
找出 ay 与 y 的关系,以及 αr , αf 的具体表达式,因为最终希望通过前轮转角 δ 实现对横向位移 y 以及汽车的横摆角 φ 的控制。
(1)、 ay 与 y 的关系
因为车身坐标系不是一个惯性系,所以 ay 的公式有点奇怪,要考虑到非惯性系下的单位矢量的求导。
(2)、αr,αf 的具体表达式
后轮αr:
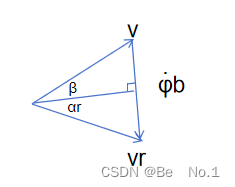
这里的的结果是由刚体平面运动的速度合成法得到的(我感觉
这个向量的方向反了)。αr 比较小,则
。
可以得出 ,因为 αr(侧偏角)是负的。
前轮αf:
,
。αf(侧偏角)也是负的。
将αr,αf代入上述公式可以得出动力学方程:
找到了通过控制前轮转角 δ ,来控制横向位移y、横摆角φ的控制。

















 886
886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









