







目录
一、简介
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),在前面课程中我们讲解了Intel RealSense深度相机ROS驱动相关知识,接下来我们来学习机器人手眼标定原理。
机器人手眼标定原理
二、环境版本
- 主机系统版本:Windwos10 64位
- 处理器型号:Intel-i7
- 虚拟机版本:VMware Workstation 16 Pro
- 虚拟机系统:Ubuntu 18.04.6 LTS
- ROS版本:Melodic
三、学习目标
四、知识储备
下面开始介绍本节内容的知识点:
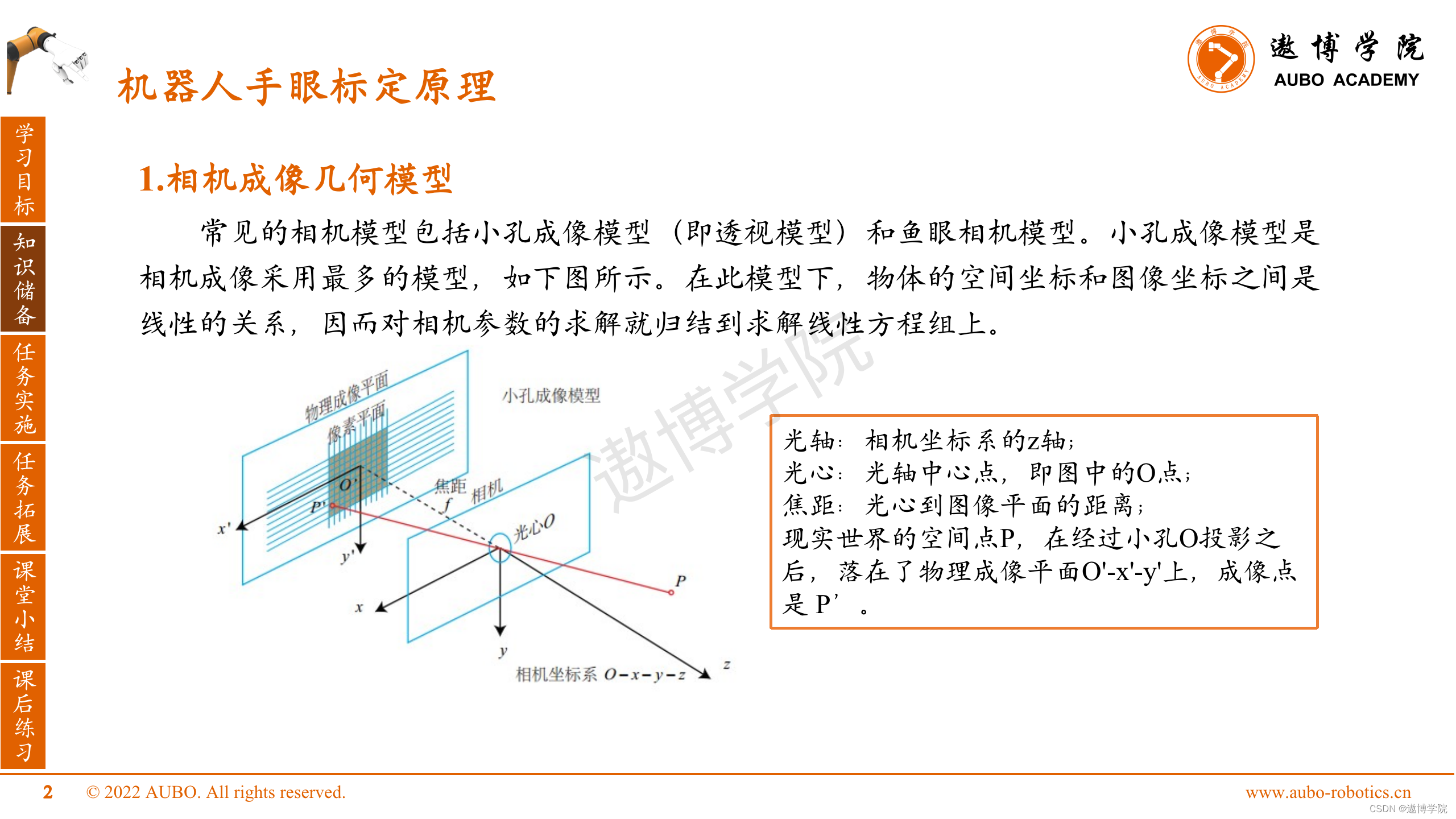
首先学习相机成像几何模型。
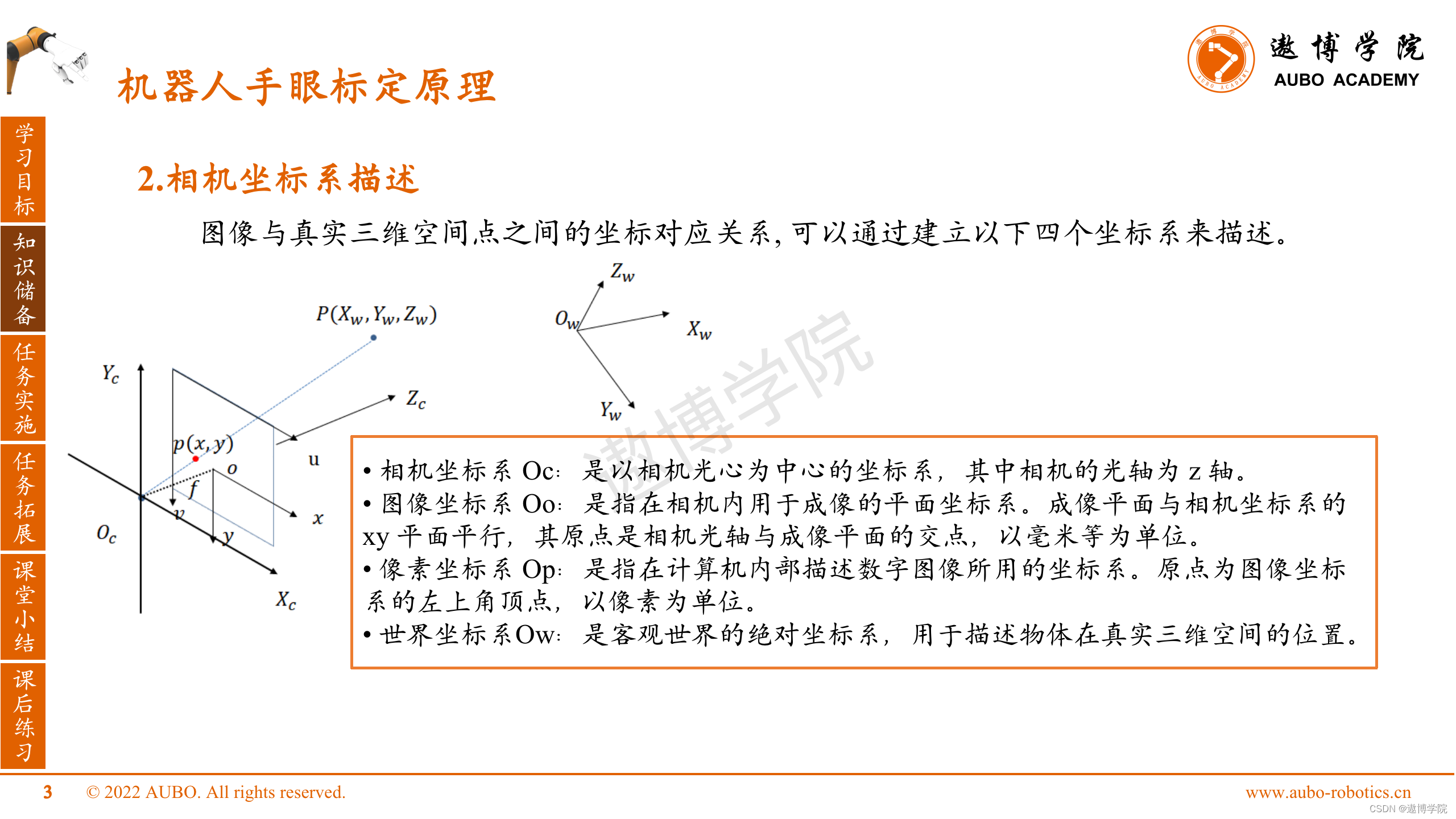
2.相机坐标系描述
图像与真实三维空间点之间的坐标对应关系, 可以通过建立以下四个坐标系来描述。
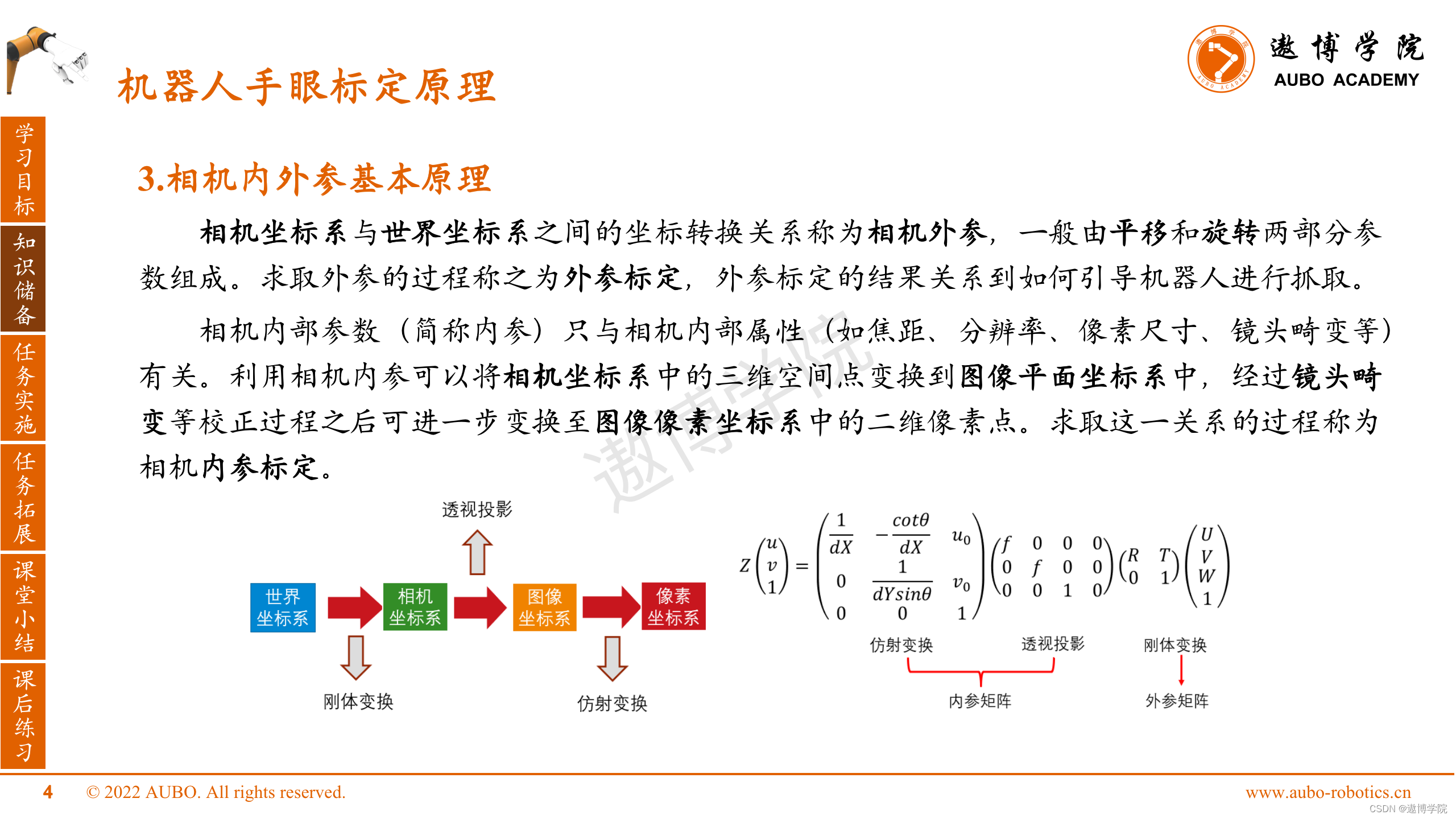
3.相机内外参基本原理
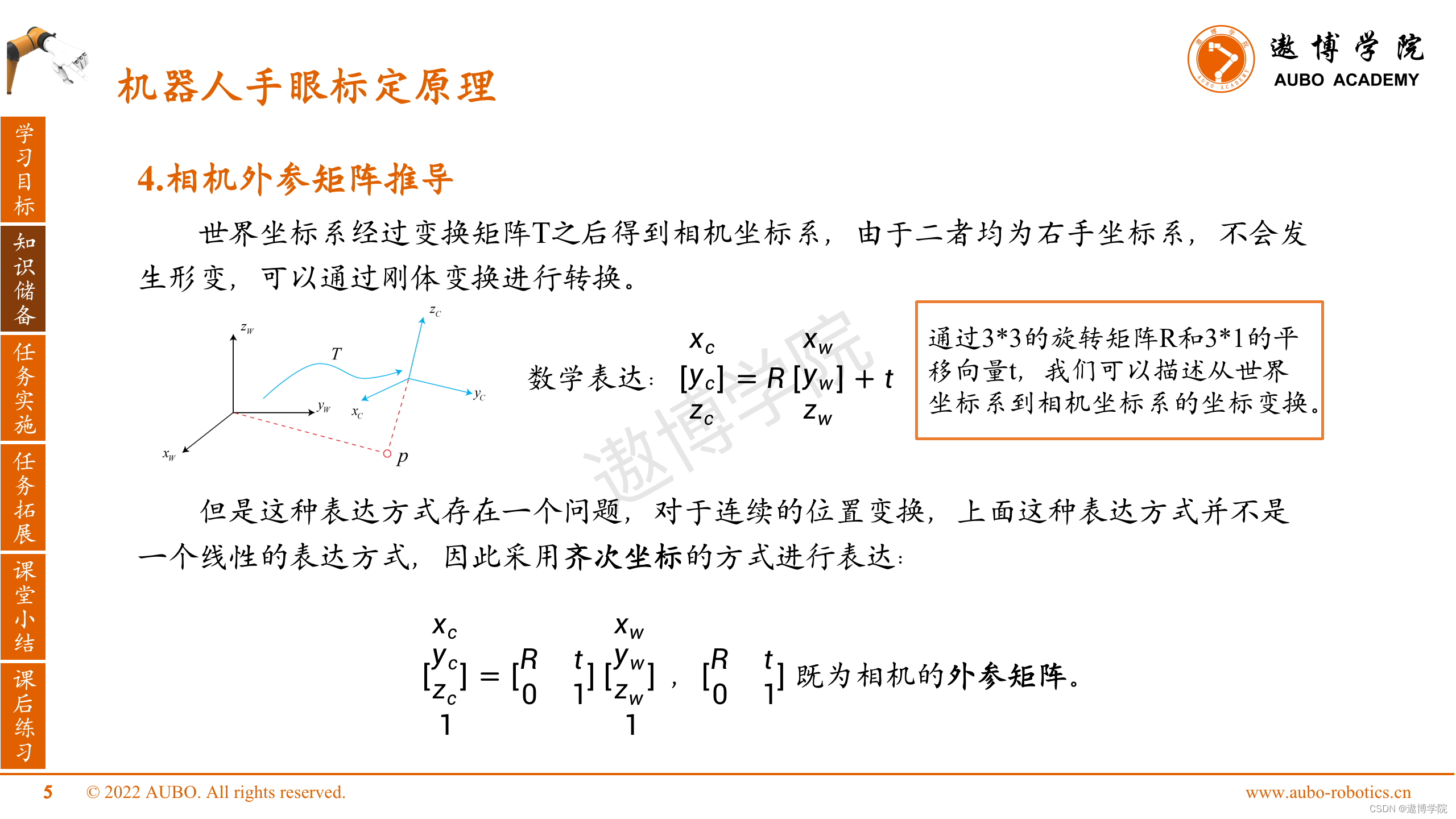
4.相机外参矩阵推导
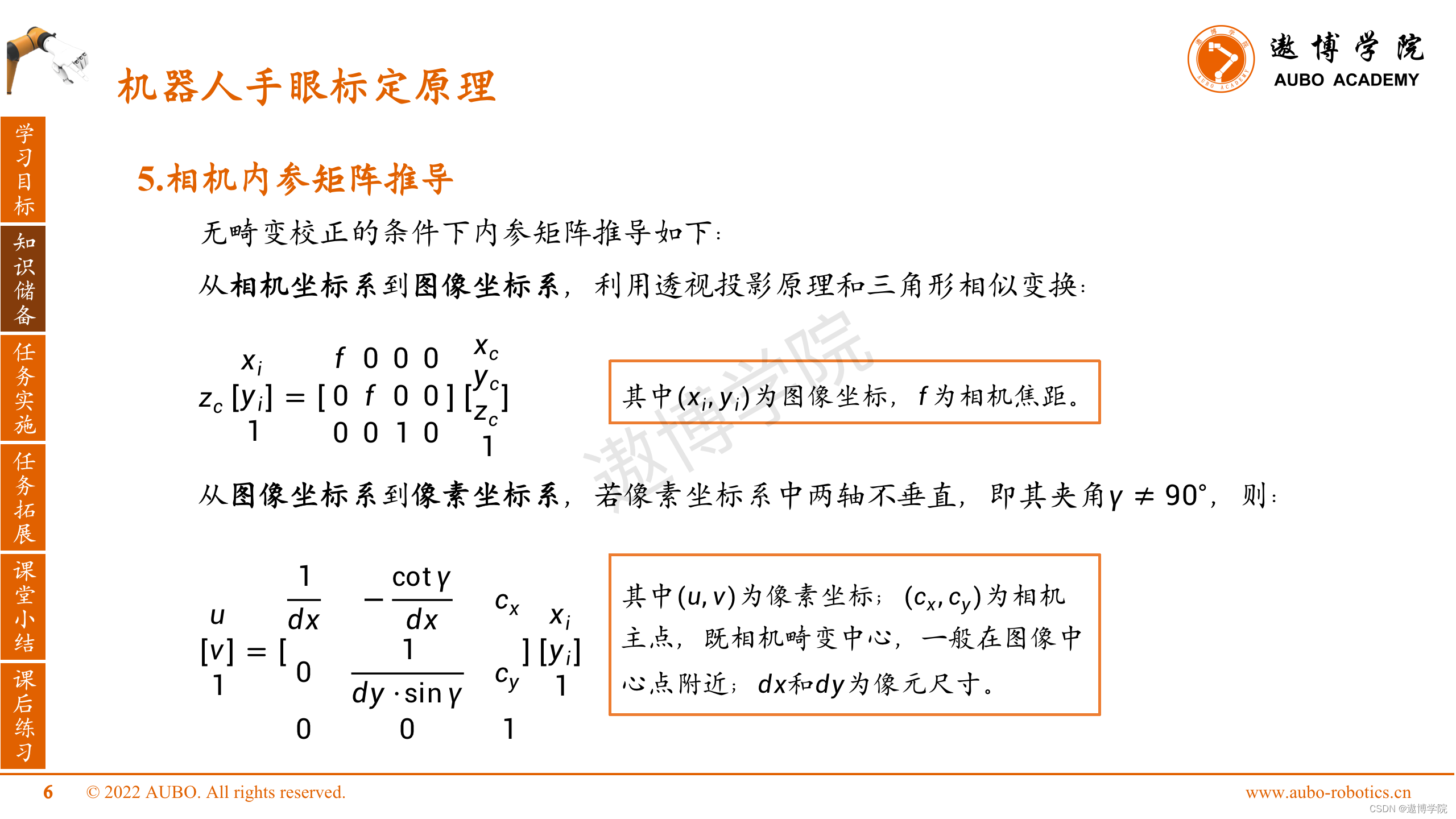
5.相机内参矩阵推导
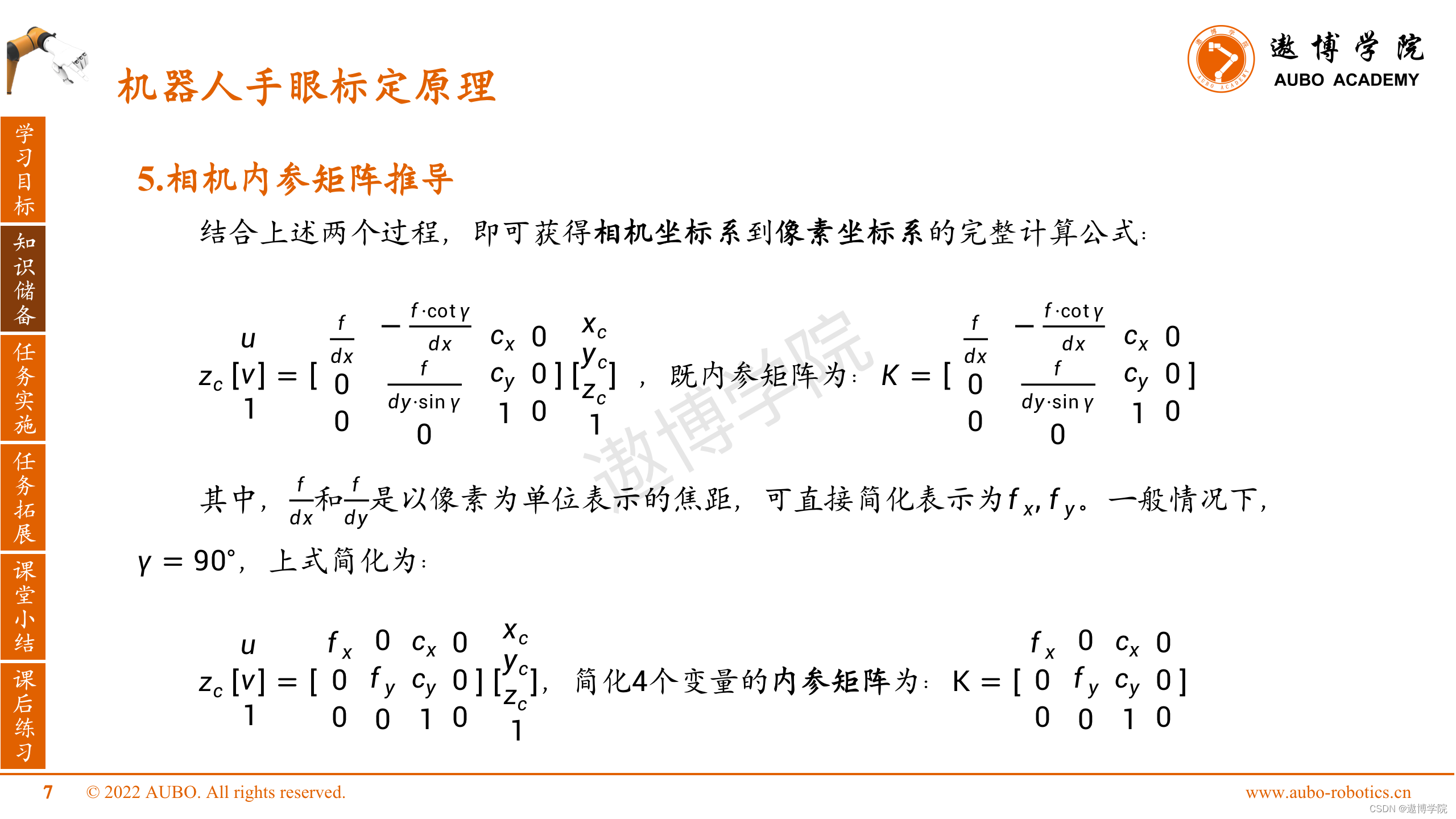
结合上述两个过程,即可获得相机坐标系到像素坐标系的完整计算公式。
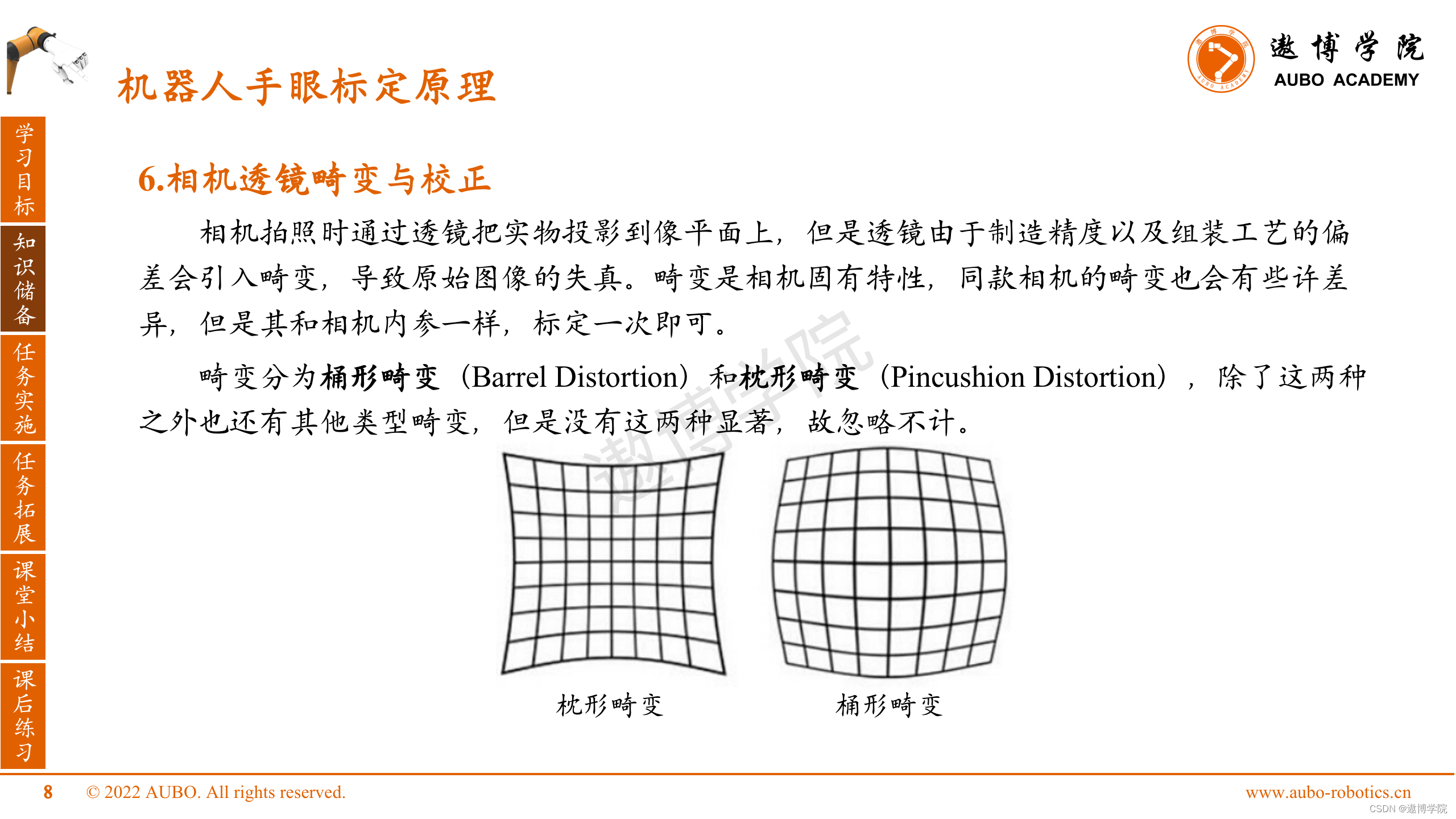
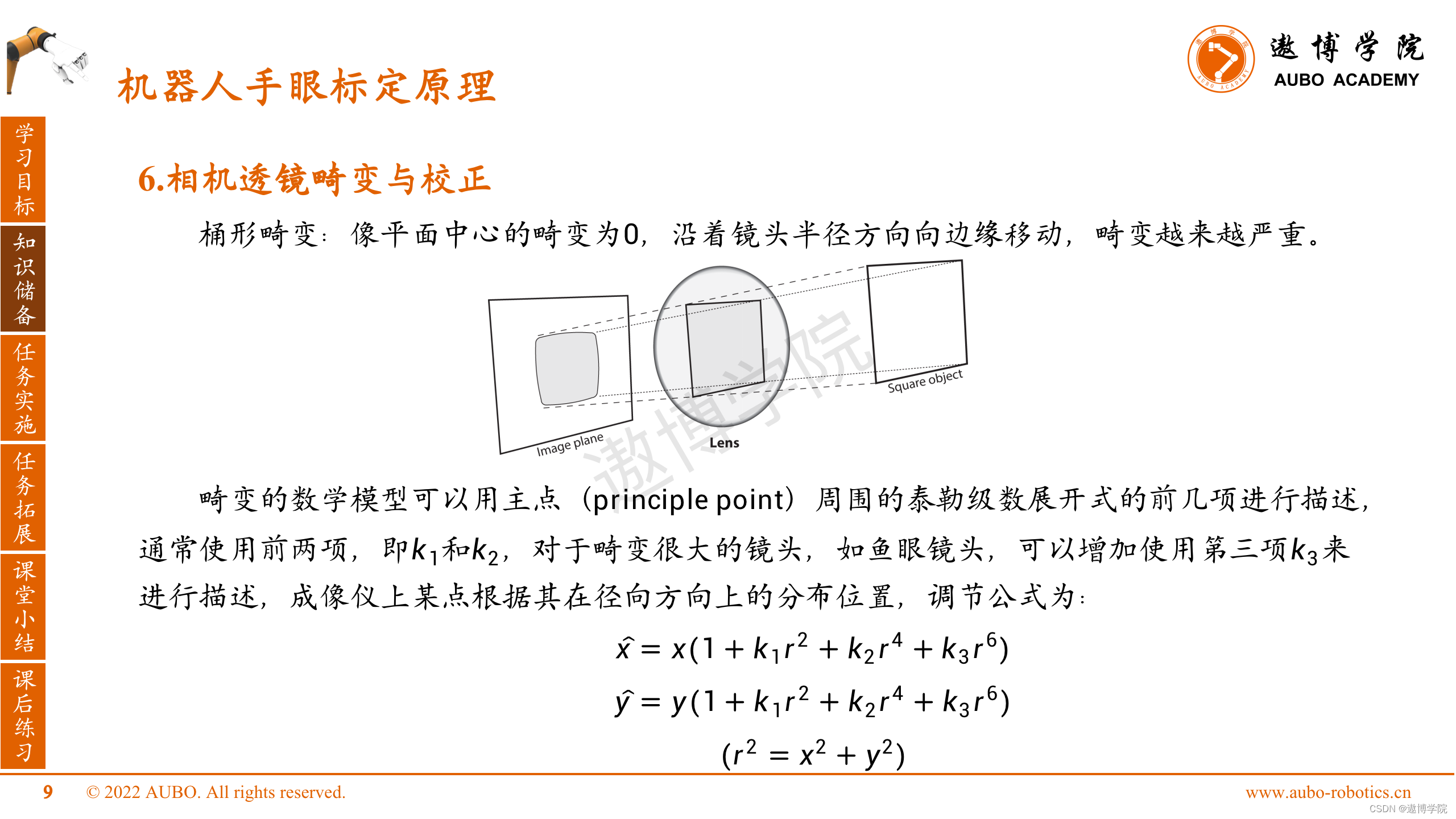
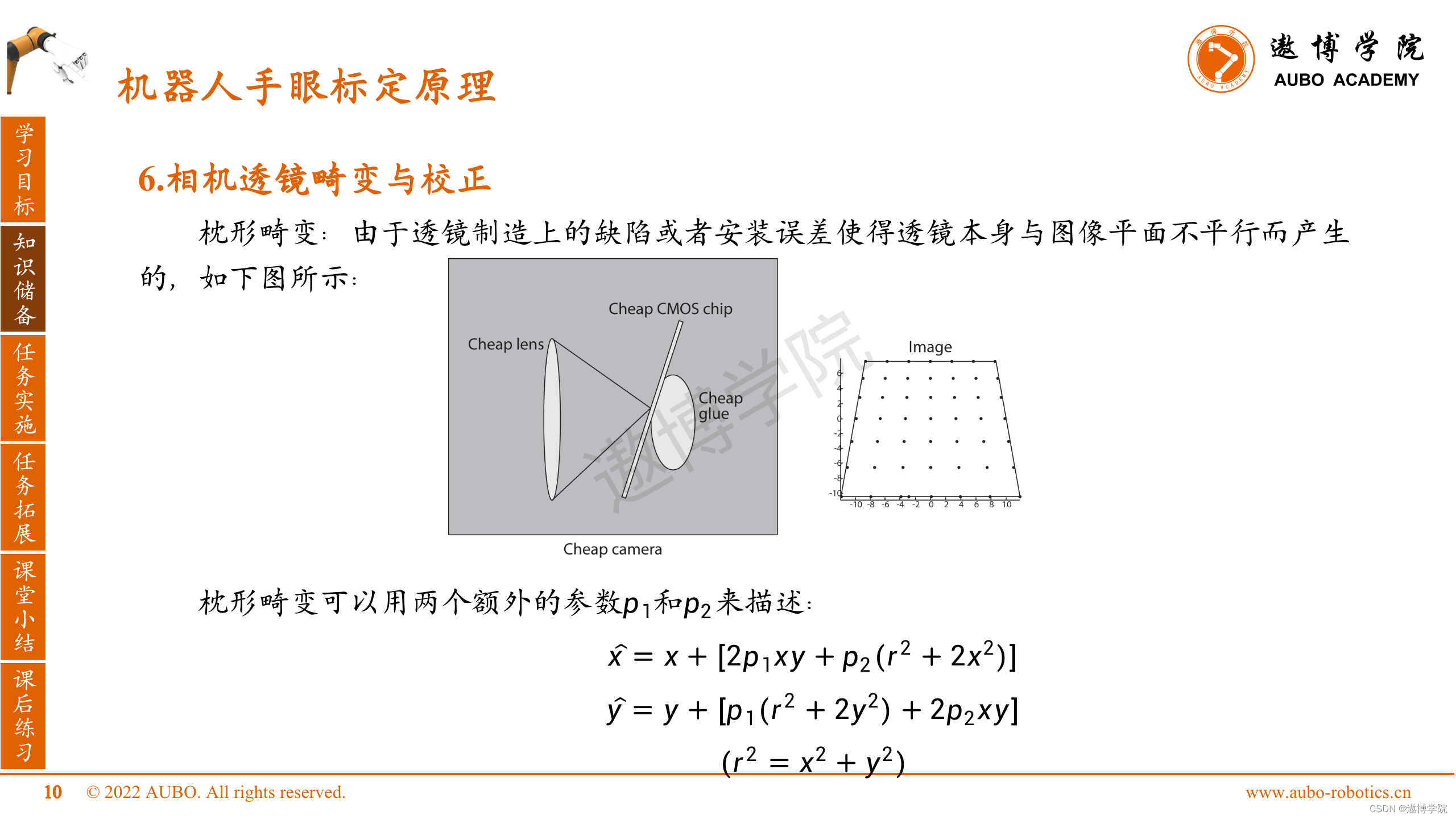
6.相机透镜畸变与校正
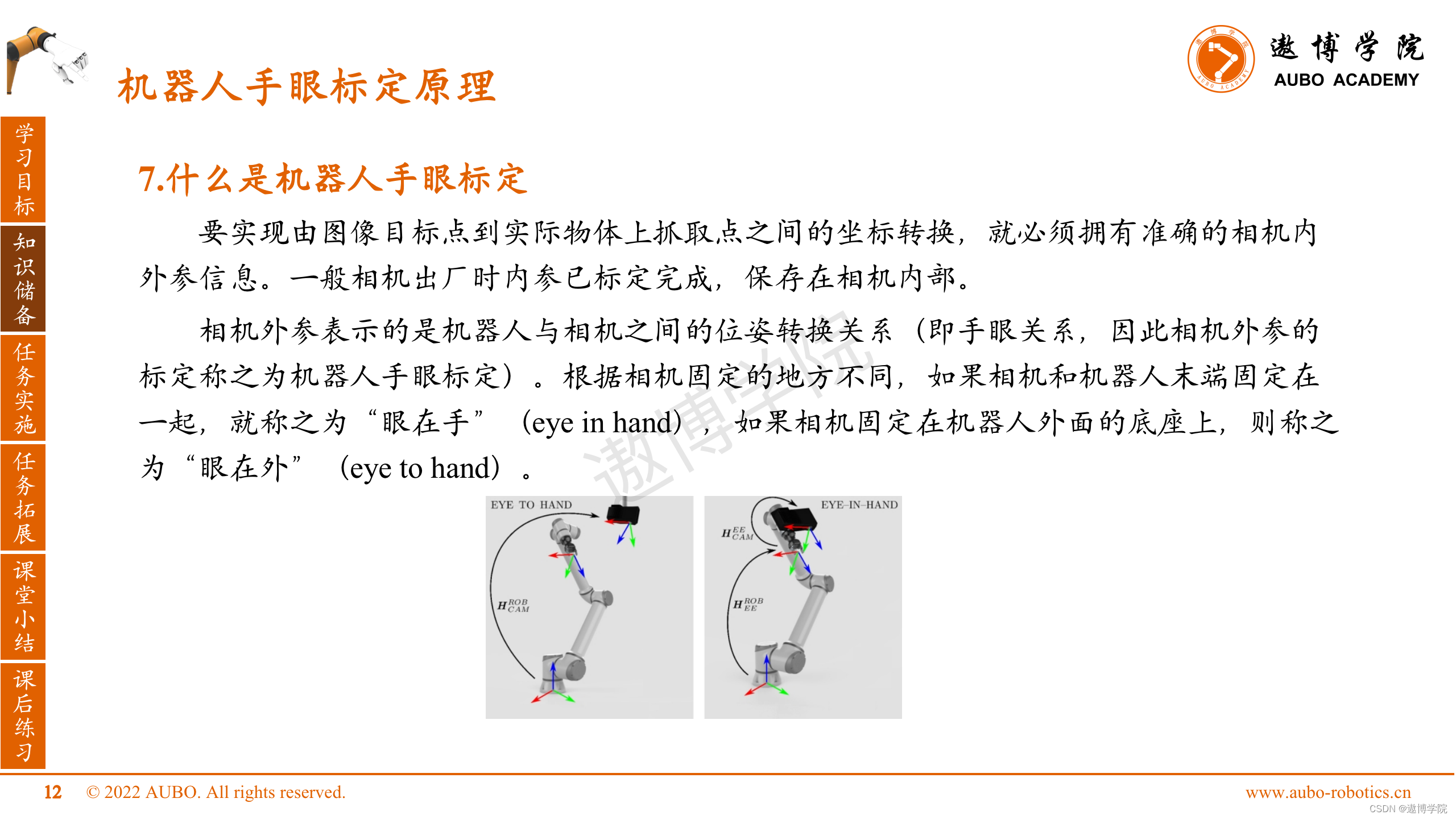
7.什么是机器人手眼标定
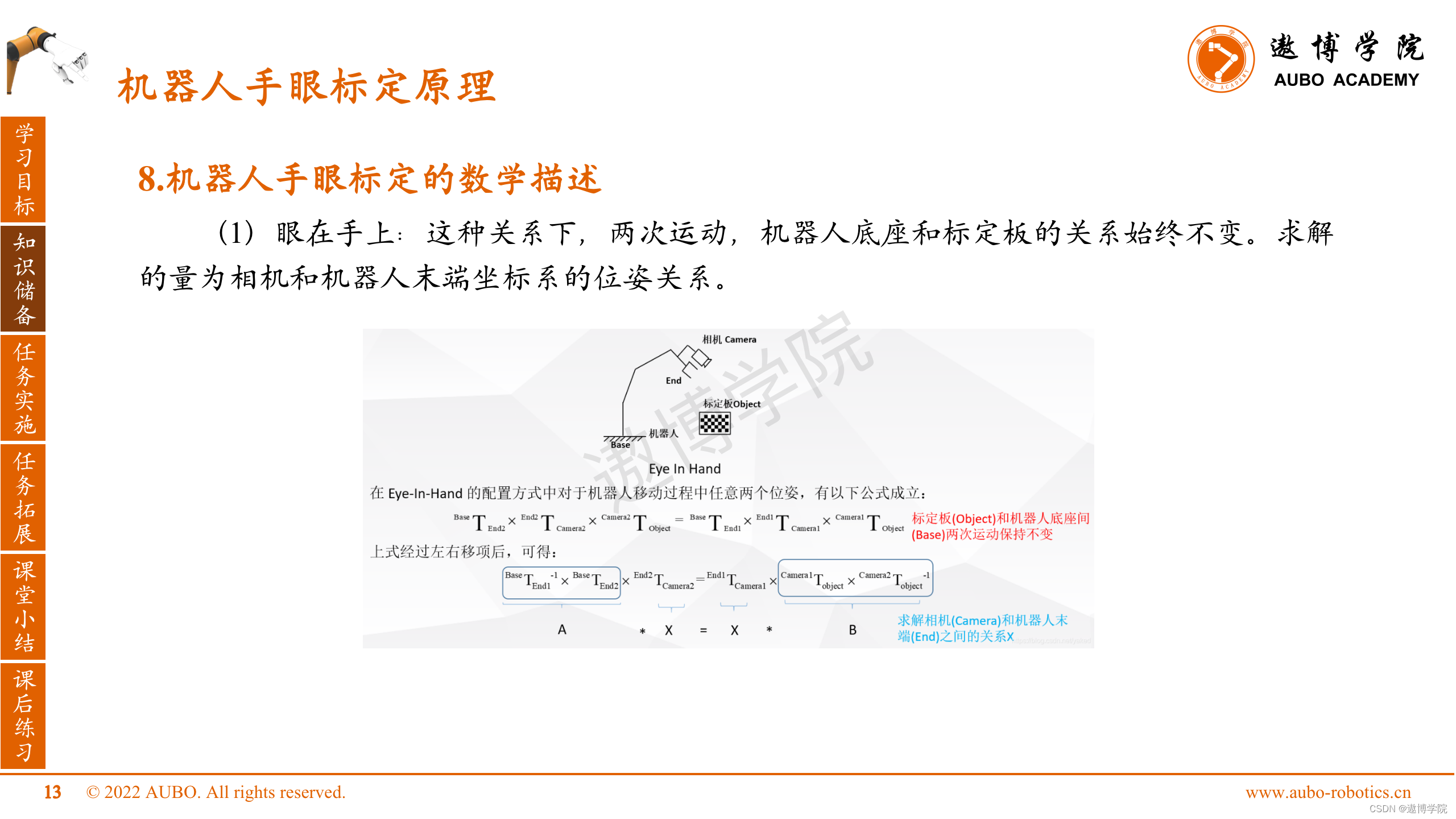
8.机器人手眼标定的数学描述
(1)眼在手上:这种关系下,两次运动,机器人底座和标定板的关系始终不变。求解的量为相机和机器人末端坐标系的位姿关系。
(2)眼在手外:这种关系下,两次运动,机器人末端和标定板的位姿关系始终不变。求解的量为相机和机器人底座坐标系之间的位姿关系。

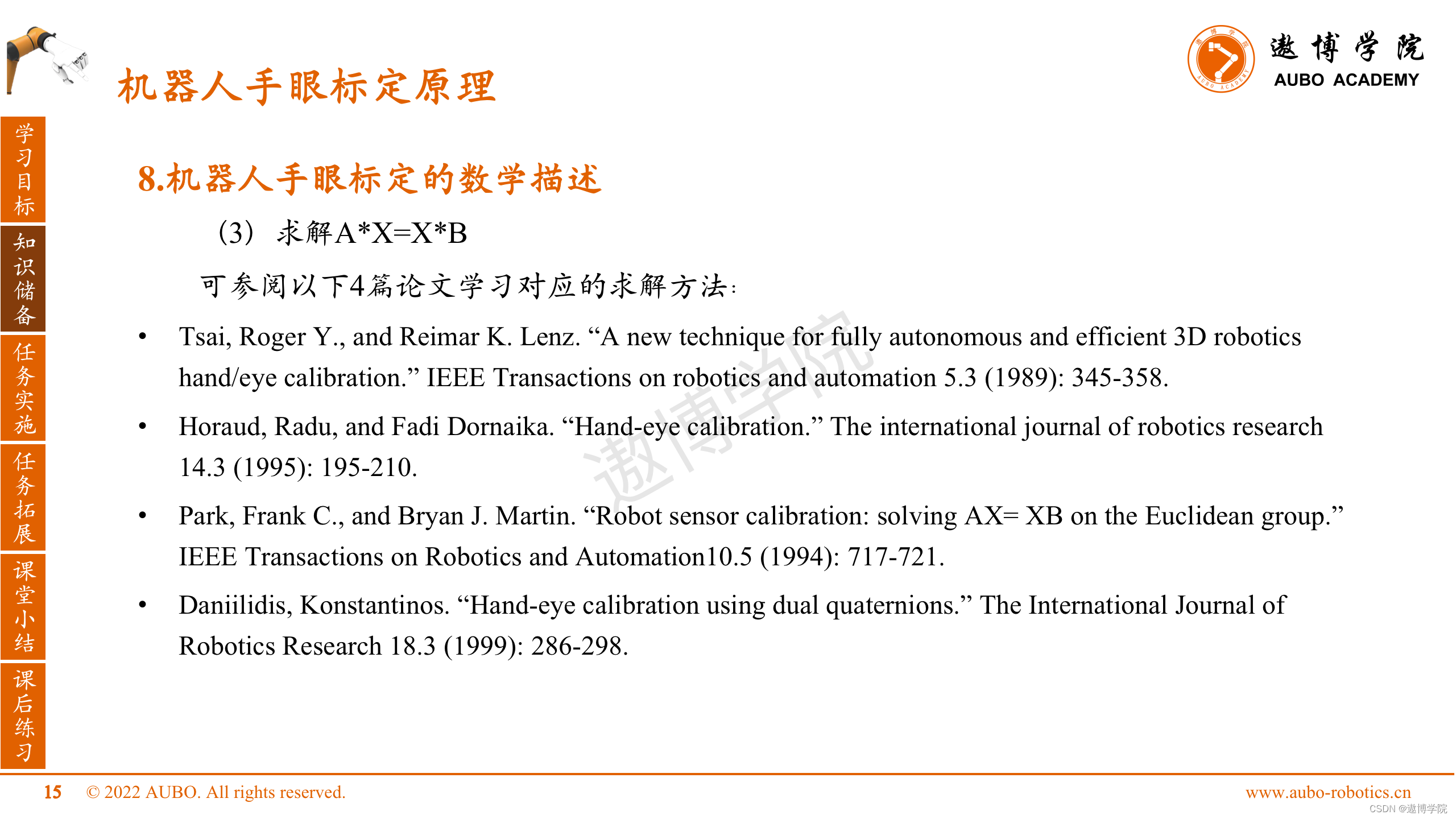
(3)求解A*X=X*B
可参阅以下4篇论文学习对应的求解方法。
五、课堂小结
下面我们进行课堂小结:
1.简述图像与真实三维空间点之间的坐标对应关系用到的四个坐标系及定义。
2.简述相机内外参的基本原理。
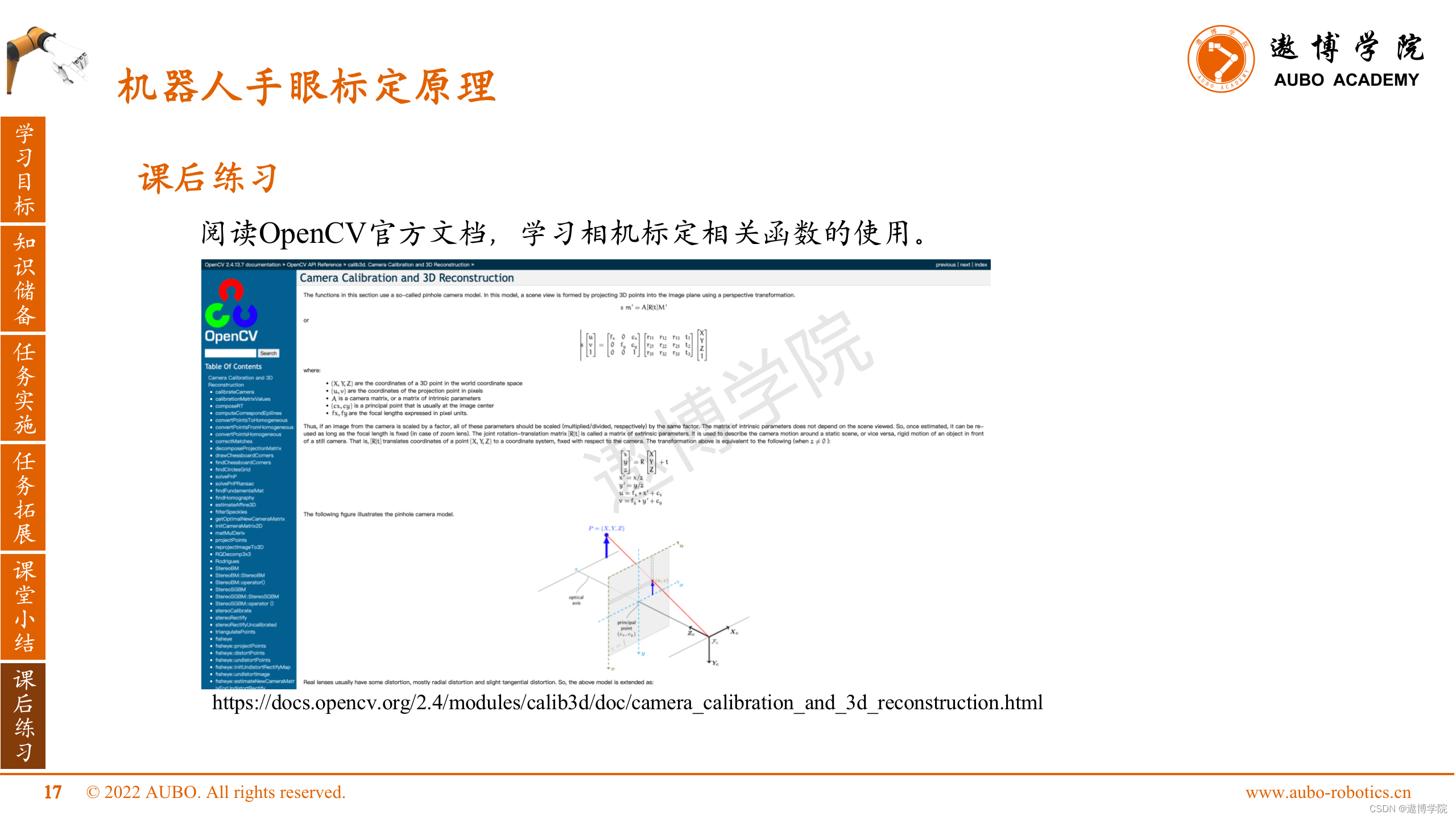
六、课后练习
阅读OpenCV官方文档,学习相机标定相关函数的使用。
在接下来的ROS课程中,我们会讲解遨博E5机械臂与相机手眼标定,欢迎持续关注。
















 2182
2182











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









