






ros map数据坐标变换
坐标系

坐标计算:
图片坐标系下的实际坐标(-10, -26)单位m(非ros坐标,如yaml中的origin)
宽:384px
长:704px
分辨率:0.05m/pxiel
图片坐标系转像素坐标系
Px = 10/0.05 = 200px;
Py = 26/0.05 = 520px;
像素其实是一个小方块,在ros map中,以方块右上角为点,如下图
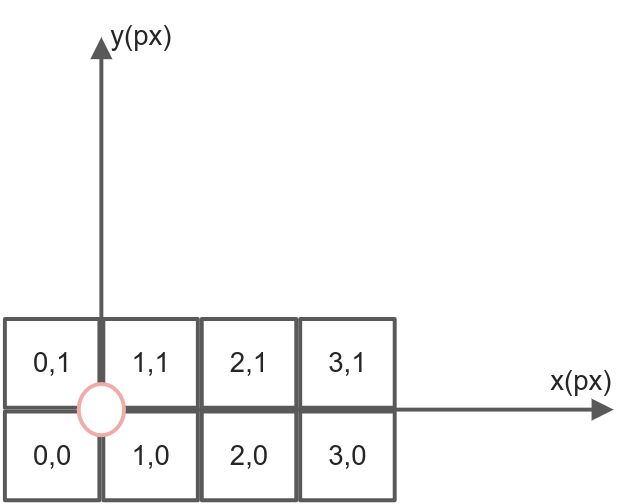
故ros的像素坐标计算应为:
Px = x/resolution-1 = 199px;
Py = y/resolution-1= 519px;
在实际编程中,我们通常只能获得基于地图坐标系的坐标(全局坐标),并不能简便的获得图片坐标。为了获得对应的像素坐标或是图片坐标,我们可以依靠Costmap_2d::Costmap2D中的worldToMap函数来计算获得:
地图坐标——>像素坐标
#include <costmap_2d/costmap_2d.h>
unsigned int mx;//像素坐标x
unsigned int my;//像素坐标y
costmap_2d::Costmap2D master_grid;
master_grid.worldToMap(mark_x_, mark_y_, mx, my);//mark_x_, mark_y_为地图坐标
像素坐标——>图片坐标
x = -(Px+1)*resolution
y = -(Py+1)*resolution
nav_msgs/OccupaidGrid计算
该msg中的data储存的ros像素坐标(199px,519px)对应的data[]数组序号计算
index = Py*width+Px
即,像素坐标(199px, 519px)对应的数组序号为
519 * 384+199 = 199495














 1898
1898











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









