







本文总结一下马尔科夫决策过程之Bellman Equation(贝尔曼方程)
1
Bellman Equation for MRPs
首先我们从value function的角度进行理解,value function可以分为两部分:

见下面的推导公式:
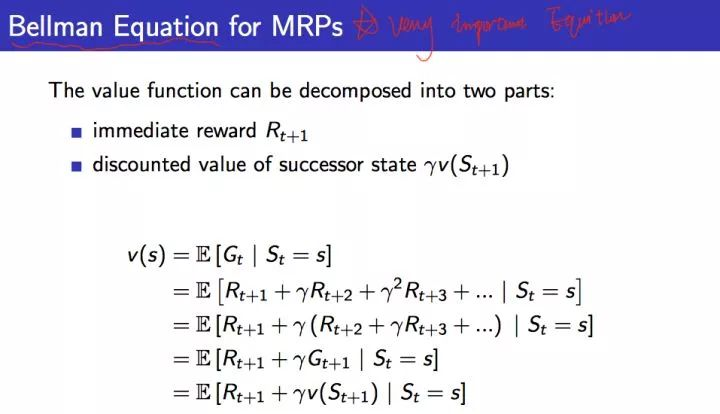
我们直接从第一行到最后一行是比较好理解的,因为从状态s到状态s+1,是不确定,还是之前的例子。
比如掷骰子游戏,当前点数是1的情况下,下一个状态有可能是1,2,3,4,5,6的任意一种状态可能,所以最外层会有一个期望符号。
如果我们跟着一直推下来的话:有疑问的会在导出最后一行时,将G(t+1)变成了v(St+1)。其理由是收获的期望等于收获的期望的期望。参考叶强童鞋的理解。
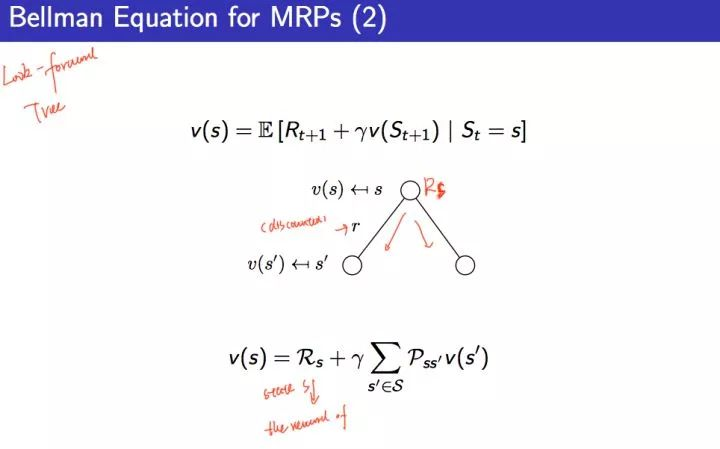
则最后我们得到了针对MRP的Bellman方程:

通过方程可以看出v(s)由两部分组成,一是该状态的即时奖励期望,即时奖励期望等于即时奖励,因为根据即时奖励的定义,它与下一个状态无关。
这里解释一下为什么会有期望符合,是因为从状态s的下一个状态s+1可能有多个状态,比如掷骰子,下一个状态可能有1,2,3,4,5,6,从s到下一个状态都是有一定概率,所以会有期望符合。
另一个是下一时刻状态的价值期望,可以根据下一时刻状态的概率分布得到其期望,比如在上面掷骰子例子中,从状态1到下一个状态1,2,3,4,5,6求期望的做法,我们可以直接用概率公式p(1->1),p(1->2),p(1->3),p(1->4),p(1->5),p(1->6) 然后乘以对应下一状态的价值函数即可。
如果用s’表示s状态下一时刻任一可能的状态,那么Bellman方程可以写成:

完整的slides如下:
2
Example: Bellman Equation for Student MRP
好,我们在上面既然知道了通过Bellman Equation来迭代的计算每个状态的价值函数,下面我们举出一个例子来算一个状态的value function帮助理解
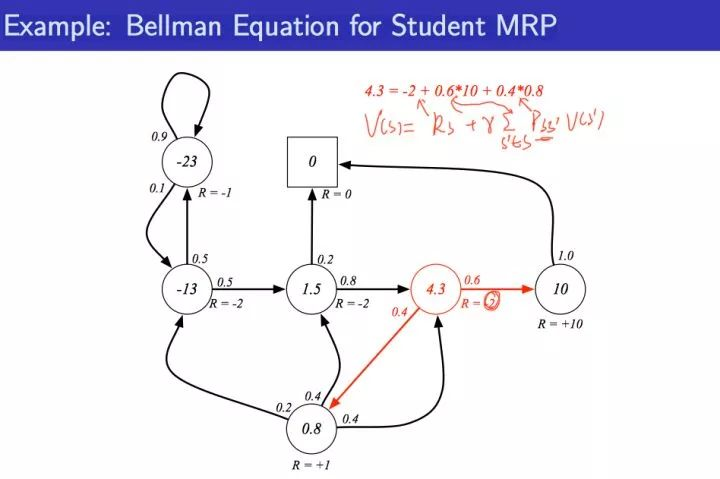
通过上图我们分析一下4.3如何计算?见下图即可:

可能还有一些童鞋会问,算该状态的value function的时候,其它的状态的value function是怎么知道的呢?
比如算4.3的时候,我们如何知道它后继状态的value funciton为0.8,10。其实这些值一开始可以任意初始化,后面可以学习更新,就类似于神经网络的权值参数,一开始任意初始化,后面通过loss反向更新一样。
3
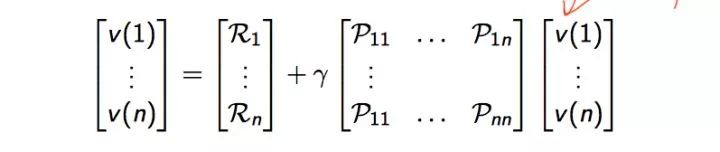
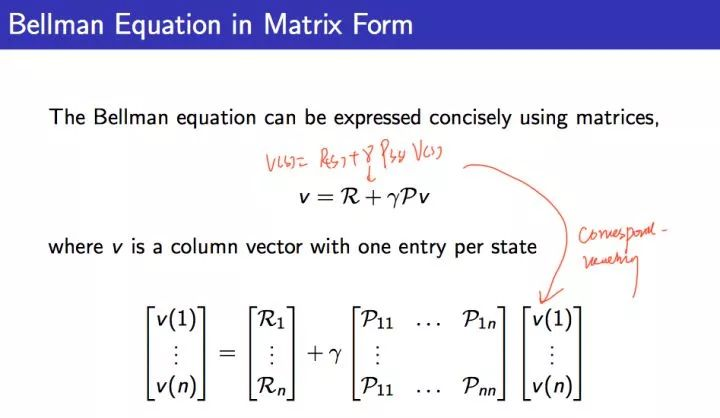
Bellman Equation in Matrix Form
最后我们可以给出Bellman方程的矩阵形式和求解

结合矩阵的具体表达形式如下:
总的slides如下:
Bellman方程是一个线性方程组,理论上解可以直接求解:
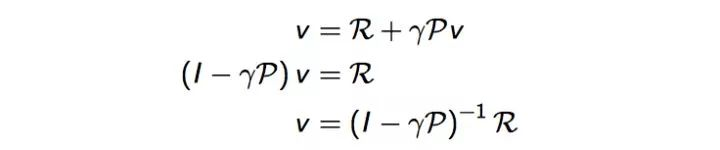
但是它的计算复杂度是0(n^3), 是状态数量,因为矩阵的求逆过程为0(n^3)。
由于求解复杂度较高。因此直接求解仅适用于小规模的MRPs。
大规模MRP的求解通常需要使用迭代法。常用的迭代方法有:
- 动态规划Dynamic Programming、
- 蒙特卡洛评估Monte-Carlo evaluation、
- 时序差分学习Temporal-Difference,

















 3053
3053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









