







一、API-rate
#rate 频率,hz,10赫兹:一秒钟执行10次
rospy.Rate(10)控制频率:
#!/usr/bin/env python
#coding:utf-8
#ros的python环境
import rospy
if __name__ == '__main__':
#ros的节点,需要传入节点的名称
rospy.init_node('hello_node')
print 'hello ros python'
#rate 频率,hz赫兹,一秒钟执行1次
rate = rospy.Rate(1)
while True:
print 'hello ros python'
rate.sleep()//休眠(1/rate)秒
rospy.spin()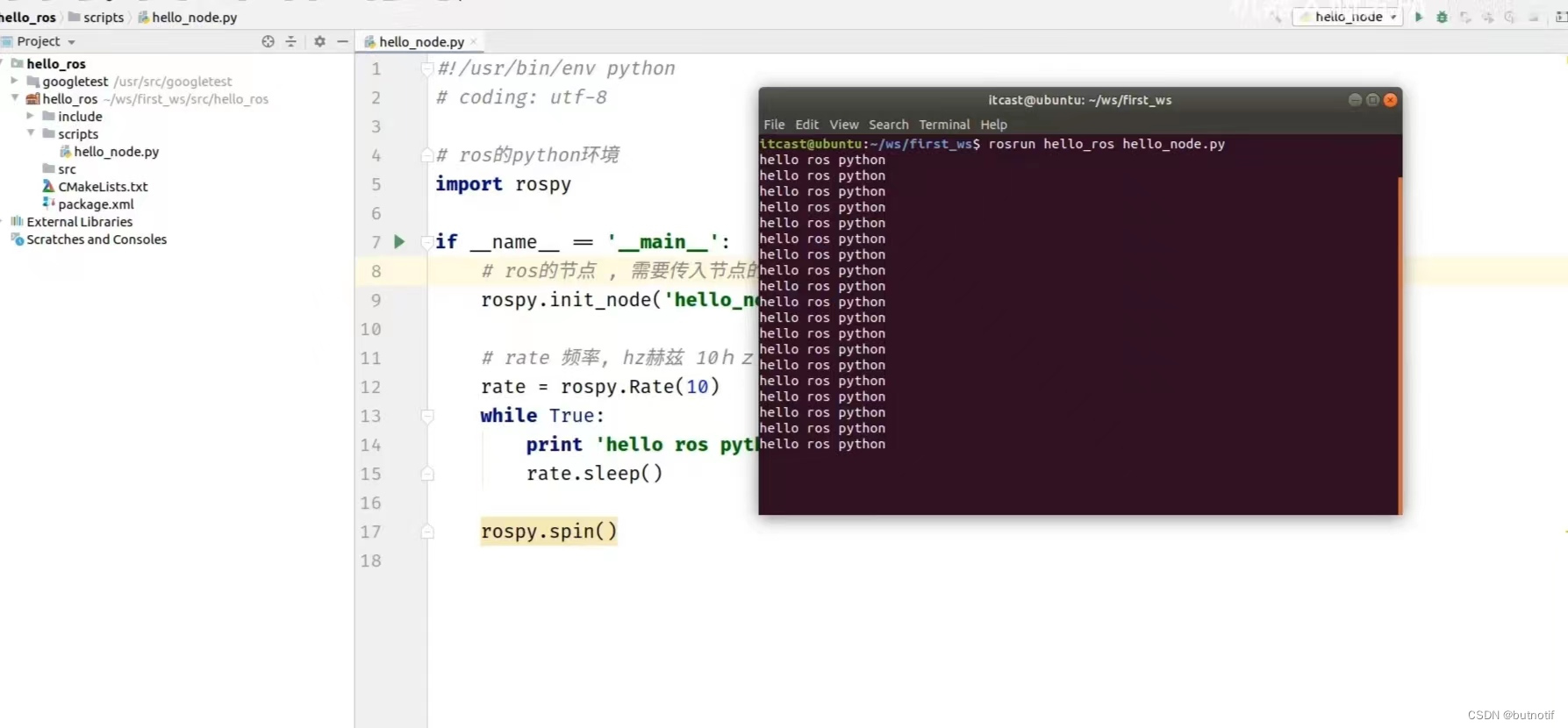
API-节点状态判断
#当前节点已经被终止
rospy.is_shutdown()实例:
#!/usr/bin/env python
#coding:utf-8
#ros的python环境
import rospy
if __name__ == '__main__':
#ros的节点,需要传入节点的名称
rospy.init_node('hello_node')
print 'hello ros python'
#rate 频率,hz赫兹,一秒钟执行10次
rate = rospy.Rate(1)
while not rospy.is_shutdown():
print 'hello ros python'
rate.sleep()
rospy.spin()

命令行中按住ctrl+c就会终止节点(进程),如上图所示。














 164
164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









