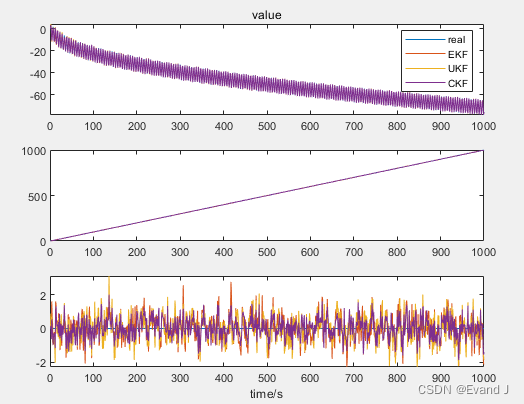
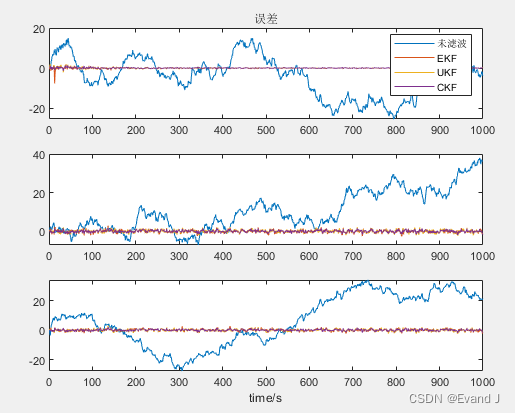
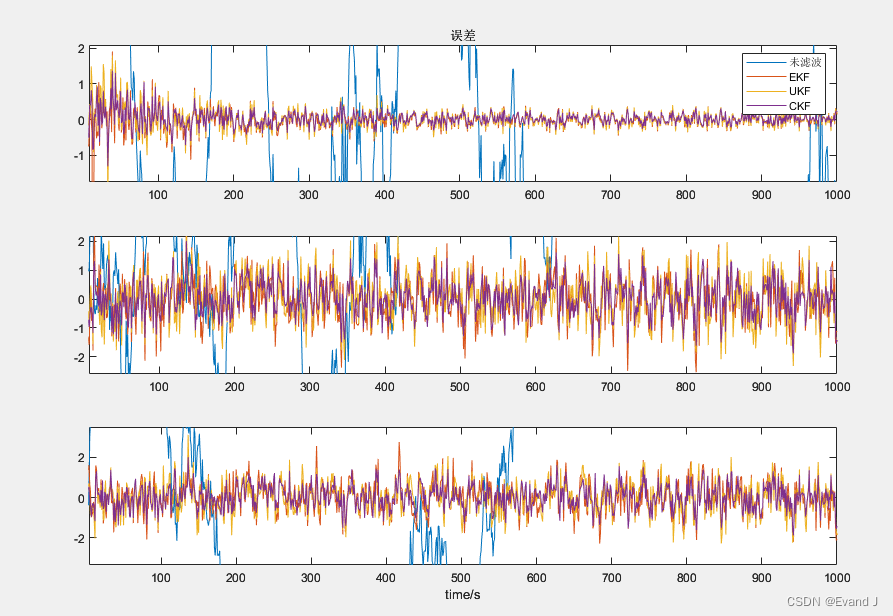
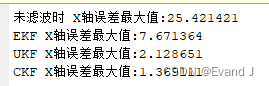
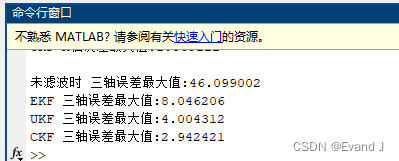
使用MATLAB模拟三维的滤波,包含扩展卡尔曼滤波EKF、无迹卡尔曼滤波UKF、容积卡尔曼滤波CKF。 状态更新和观测更新均为非线性的,模拟一定强度的机动性,可用于卡尔曼滤波方法的对比学习,自己修改成需要的运动模型后,可以用于组合导航(GPS+DVL形式)。 运行结果 真值的三轴数据和各个滤波方法估计出来的三轴值: 三轴误差时序图: 因为几个滤波结果较为相近,将其放大,得到: 能看出来CKF的效果是最好的。 误差输出 程序源码









 订阅专栏 解锁全文
订阅专栏 解锁全文















 1077
1077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








