







PSINS
西工大的PSINS工具箱是一种用于惯性导航系统的开源软件工具包。它提供了一系列算法和功能,可用于处理惯性测量单元(IMU)和全球定位系统(GPS)等传感器数据,以实现精确的导航和定位。
西工大的PSINS工具箱在导航中的作用是实现精确的姿态解算、导航解算和集成导航,并提供参数标定功能,以提高导航系统的精度和稳定性。
在协同导航的领域中,工具箱没有进行相关的研究,这里基于工具箱,以主从式协同导航为例,来尝试设计一个基于相对距离观测的协同导航。
【值得注意的是】:仅距离观测时,必须有4个及以上的主机,并以三点法定位和紧耦合/紧组合的原理才能保证滤波收敛。
距离观测
主机和从机之间搭载UWB、WIFI等,即可测量距离,不同的测量方法有不同的误差模型,不再赘述。
PSINS的位置(状态量第7~9维)是纬经高,因此测量相对位置的时候,最好换算成直角坐标系下的xyz来测量。
仿真结果
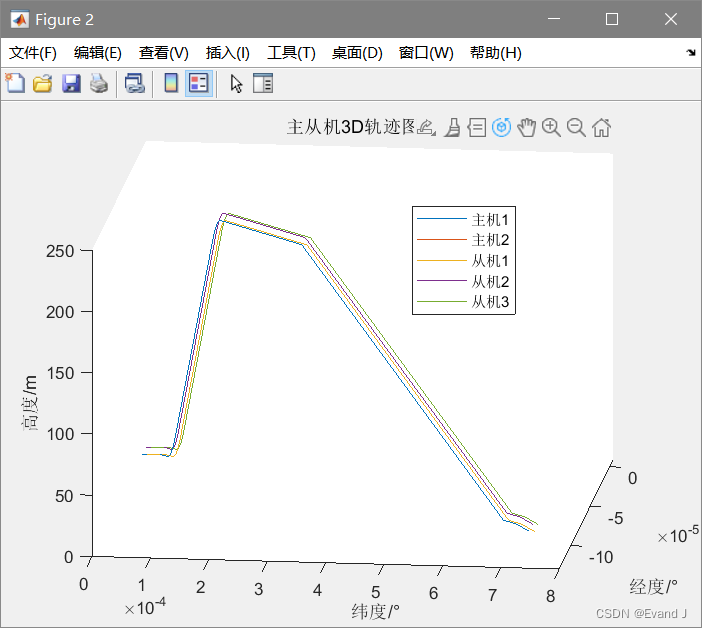
设计5个节点的协同导航,其中主机2个、从机3个。主机搭载GNSS和IMU,使用经典的组合导航。从机搭载IMU和用于观察主机位置的传感器(可以是视觉,也可以是无线电,等等,符合能测量位置的要求即可),使用EKF进行数据融合。五个节点的运行轨迹如下:
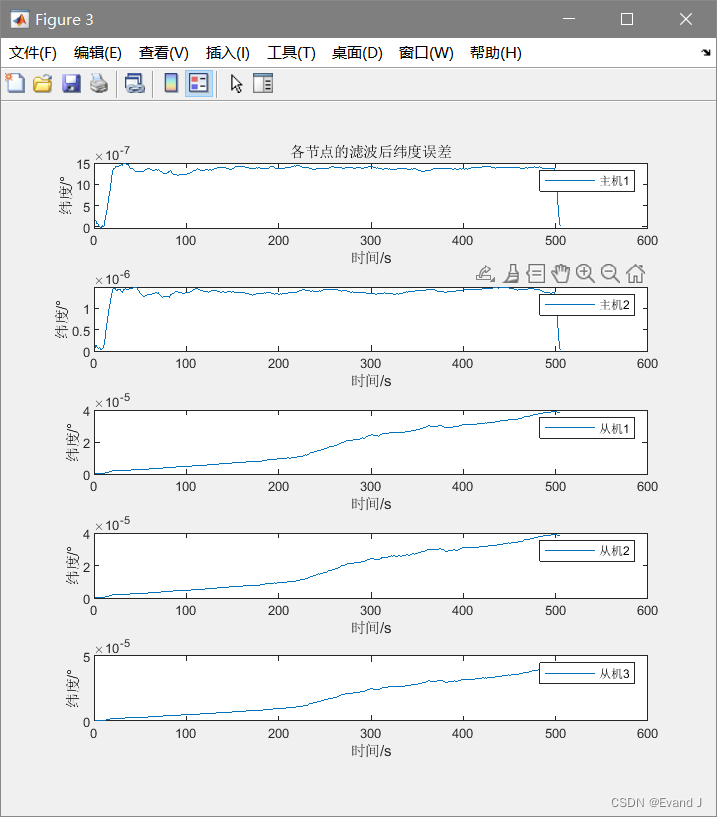
得到的各节点纬度误差曲线图如下:
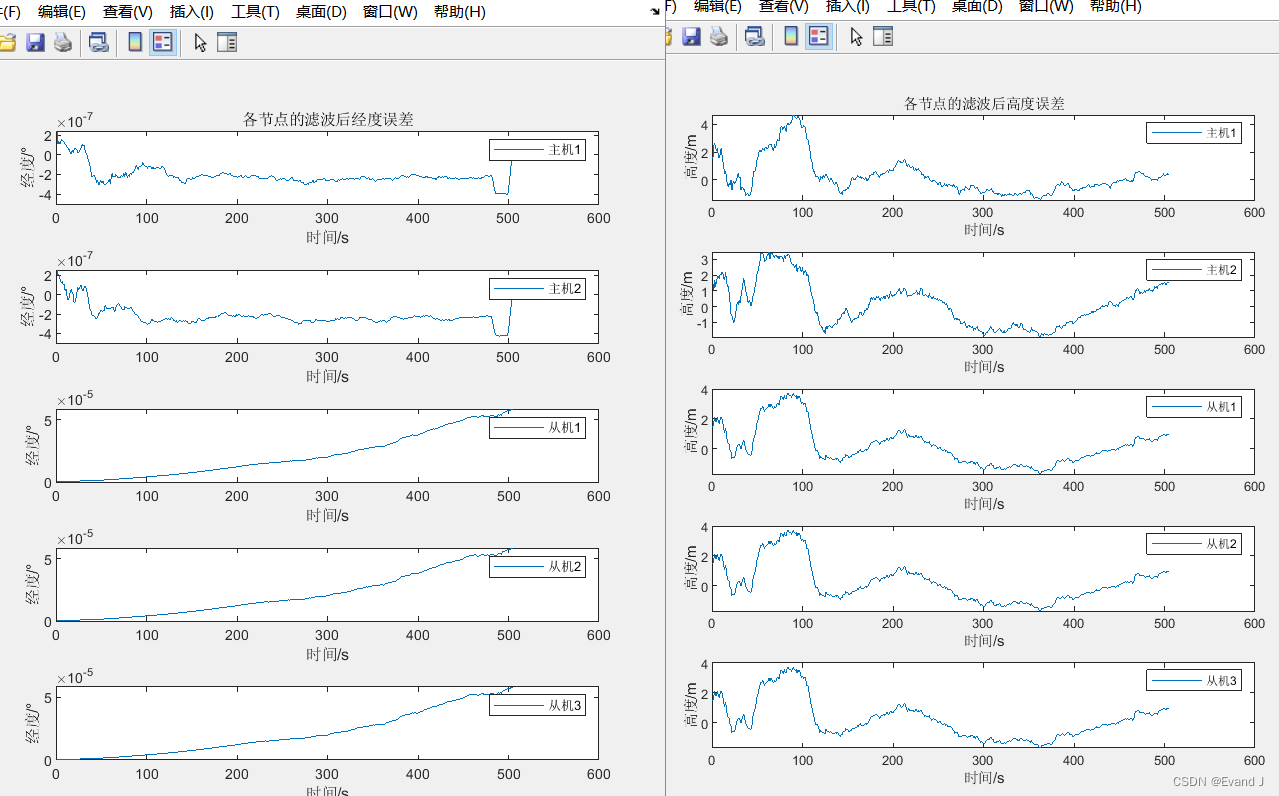
经度和高度误差的曲线如下:
仿真代码
原创的代码,给出来部分截图:

完整代码链接:https://download.csdn.net/download/callmeup/89328091
















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











