




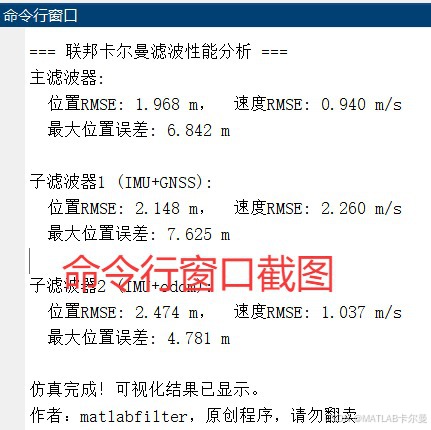
本程序实现标准结构的联邦卡尔曼滤波( F K F FKF FKF),融合 I M U + G N S S IMU+GNSS IMU+GNSS与 I M U + o d o m IMU+odom IMU+odom两个子滤波器,通过主滤波器统一估计二维位置、速度与加速度。系统考虑公共信息管理、信息加权融合及反馈机制,具备高精度和鲁棒性,适用于多传感器导航仿真。
程序介绍
本联邦卡尔曼滤波(Federated Kalman Filter)的MATLAB例程适用于多传感器融合系统。介绍如下:
系统架构
- 主滤波器: 负责全局状态融合
- G N S S GNSS GNSS子滤波器: 处理位置观测数据
- IMU子滤波器: 处理加速度观测数据
- 里程计子滤波器: 处理速度观测数据
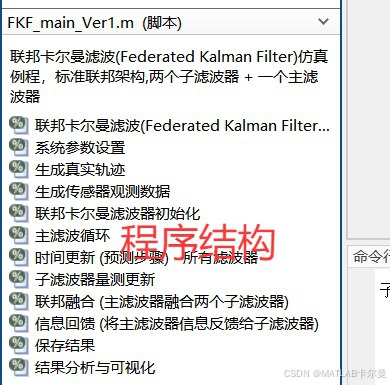
代码结构
主程序部分:
├── 参数设置
├── 轨迹生成
├── 传感器数据生成
├── 滤波器初始化
├── 主滤波循环
├── 结果分析
└── 扩展功能演示
函数定义部分:
├── generate_true_trajectory()
├── generate_sensor_data()
├── initialize_federated_filter()
├── run_federated_filter()
├── time_update()
├── measurement_update()
├── federated_fusion()
├── information_feedback()
├── analyze_results()
└── demo_adaptive_federated_filter()
运行结果
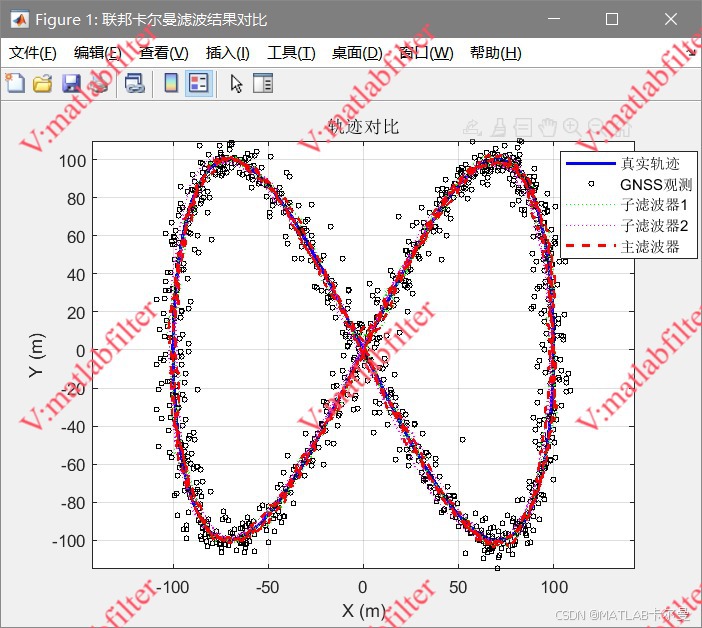
各方法得到的轨迹对比:
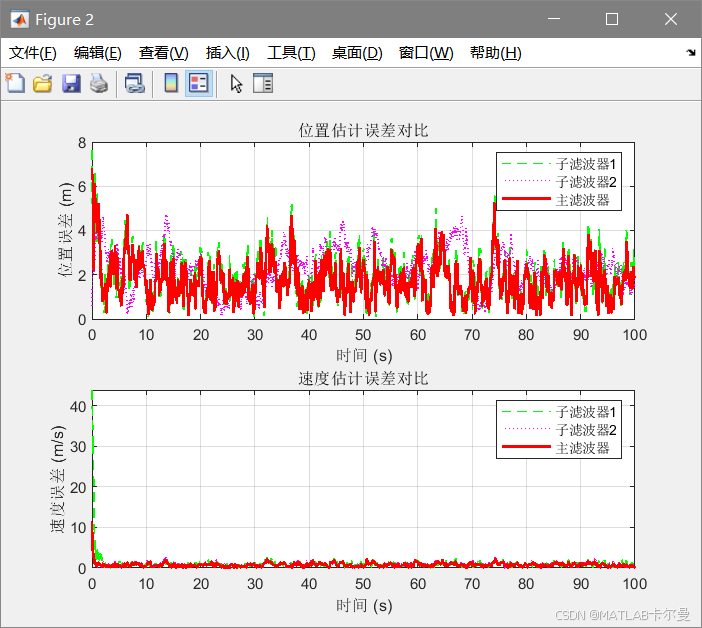
各方法得到的误差对比:
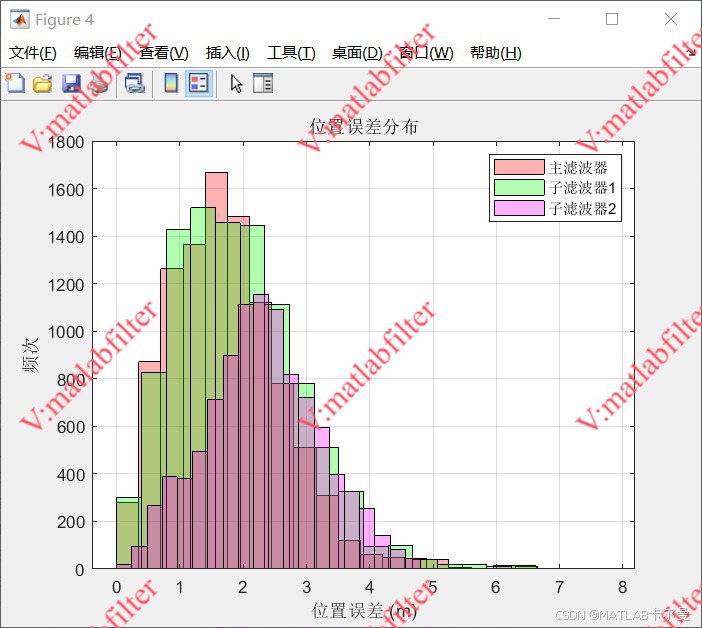
位置误差的分布柱状图:
命令行窗口输出的误差特性:
MATLAB源代码
代码结构:
部分代码如下:
%% 联邦卡尔曼滤波(Federated Kalman Filter)仿真例程,标准联邦架构,两个子滤波器 + 一个主滤波器
% 子滤波器1:IMU+GNSS
% 子滤波器2:IMU+odom
% 主滤波器:融合两个子滤波器的信息
% author:Evand(V:matlabfilter)
% 2025-08-05/Ver1
clear; clc; close all;
rng(0);
%% 系统参数设置
dt = 0.01; % 采样时间 (s)
T_sim = 100; % 仿真时间 (s)
N = T_sim / dt; % 仿真步数
% 状态向量: [x, y, vx, vy, ax, ay]' (位置、速度、加速度)
n_states = 6;
% 系统噪声参数
process_noise_std = 0.1; % 过程噪声标准差
% 传感器噪声参数
GNSS_noise_std = 5; % GNSS位置噪声标准差 (m)
imu_noise_std = 0.1; % IMU加速度噪声标准差 (m/s²)
odom_noise_std = 4; % 里程计速度噪声标准差 (m/s)
fprintf('开始联邦卡尔曼滤波仿真...\n');
%% 生成真实轨迹
t = (0:N-1) * dt;
...
完整代码下载链接:https://download.csdn.net/download/callmeup/91597532
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











