







一、背景
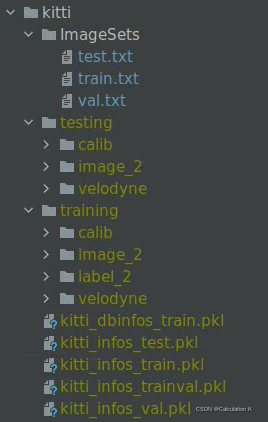
为了使用OpenPCDet的网络框架,借用kitti数据集已有的数据处理方法,我们需要把自己已标注数据进行文件夹和文件进行组织分类,便于进行预处理和加载。例如kitti的数据组织方式如下:
但是通常我们标注好的数据集一般包括两部分(以点云为例,图像类似,联合标定的除外),一是原始数据,包括原始激光雷达点云数据,pcd格式居多,存储的是每个点的三维坐标和对应的反射强度。第二部分是经过人工确认的标签信息,可能包括目标id,类别,坐标(x,y,z),尺寸(长,宽,高),航向角等信息,可以是csv,txt,等多种格式文件。
因此,我们需要手动组织自己的数据集,转换成kitti类似的形式,这里编写脚本根据预设的训练集验证集和测试集比例,自动组织数据
二、大致思路
1、读取工作目录下的数据文件,生成数据文件列表和总数
2、根据比例随机划分各个数据集索引
3、创建目录结构,复制对应索引的文件到指定路径
三、具体实现
import os
import numpy as np
import math
import random
import shutil
from progress.bar import Bar
def Data_PreProcess(rawpath, train_perce, val_perce, test_perce, label_form='txt', data_form='pcd2bin'):
# 1 读取路径下数据文件,并与标签文件名比对,匹配成功生成数据列表和标签列表,以及无标签数据列表
# 2、按预设比例生成各个数据集索引列表
# 3、创建各个数据集文件夹,根据格式要求,重组数据
label_num = 0
data_num = 0
for dir_name in os.listdir(rawpath):
if dir_name == 'label':
label_names = os.listdir(rawpath + 'label/')
label_names.sort()
label_num = len(label_names)
print("=====label==========")
print("Label_nums: ", label_num)
print("Firstlabel: ", label_names[0])
print("Lastlabel : ", label_names[label_num - 1])
elif dir_name == 'data':
data_names = os.listdir(rawpath + 'data/')
data_names.sort()
data_num = len(data_names)
print("=====data==========")
print("data_nums: ", data_num)
print("Firstdata: ", data_names[0])
print("Lastdata : ", data_names[data_num - 1])
else:
continue
if data_num == 0:
print("\nError! can not find 'data' in ", rawpath)
if label_num == 0:
print("\nError! can not find 'label' in ", rawpath)
if data_num != label_num:
print("\nWarning! data_num!=label_num ")
# 检查数据与标签名是否一致
j = 0
for i in range(len(label_names)):
templabel = label_names[i][:-4]
tempdata = data_names[i][:-4]
if templabel != tempdata:
print("label and data not match", templabel, tempdata, i)
j = j + 1
print(" not match num :", j)
# 按比例分配数据集
# 训练集 /和(验证+测试)
train_data, traindata_index, other_data, other_index = DataSplit(data_names, train_perce)
if test_perce == 0 and train_perce + val_perce == 1:
val_data = other_data
valdata_index = other_index
else:
# 再次划分 验证集和测试集
percent = val_perce / (val_perce + test_perce) * 1.0
val_data, valdata_index, test_data, test_index = DataSplit(other_data, percent)
print("=====Spil Set==========")
print("train_num: ", len(train_data))
print("Val_num : ", len(val_data))
print("test_num : ", len(test_data))
# 将分配好的数据配置 写入“dataSets”目录下的 train.txt val.txt test.txt
# 创建目录结构
pre_root_path = rawpath + 'DataGroup/'
DataSets_Path = pre_root_path + '/DataSets'
traindata_Path = pre_root_path + '/training/data'
trainlabel_Path = pre_root_path + '/training/label'
testdata_Path = pre_root_path + '/testing/data'
testlabel_Path = pre_root_path + '/testing/label'
if not os.path.exists(DataSets_Path):
os.makedirs(DataSets_Path)
if not os.path.exists(traindata_Path):
os.makedirs(traindata_Path)
if not os.path.exists(trainlabel_Path):
os.makedirs(trainlabel_Path)
if not os.path.exists(testdata_Path):
os.makedirs(testdata_Path)
if not os.path.exists(testlabel_Path):
os.makedirs(testlabel_Path)
# 创建数据分配文本:
train_filename = DataSets_Path + '/train.txt'
val_filename = DataSets_Path + '/val.txt'
test_filename = DataSets_Path + '/test.txt'
train_cluster = []
test_cluster = []
train_file = open(train_filename, 'w')
for i in train_data:
index = i.rfind('.')
name = i[:index]
train_file.write(name + '\n')
train_cluster.append(name)
train_file.close()
val_file = open(val_filename, 'w')
for i in val_data:
index = i.rfind('.')
name = i[:index]
val_file.write(name + '\n')
train_cluster.append(name)
val_file.close()
test_file = open(test_filename, 'w')
for i in test_data:
index = i.rfind('.')
name = i[:index]
test_file.write(name + '\n')
test_cluster.append(name)
test_file.close()
# 将分配好的数据配置 写入“prepcess”目录下的 training val testing
# training copy data to
data_srcfile = rawpath + '/data/'
label_srcfile = rawpath + '/label/'
tra_data_dstpath = traindata_Path + '/'
tra_label_dstpath = trainlabel_Path + '/'
test_data_dstpath = testdata_Path + '/'
test_label_dstpath = testlabel_Path + '/'
bar = Bar('cluster train_data...', max=len(train_cluster), fill='#', suffix='%(percent)d%%')
for i in train_cluster:
if data_form=='pcd':
pcd2bin(data_srcfile + i + '.pcd', tra_data_dstpath + i + '.bin')
elif data_form == 'bin':
shutil.copy(data_srcfile + i + '.bin', tra_data_dstpath + i + '.bin') # 复制文件 到 training/data
else:
print("Unkown data form! 'bin' or 'pcd' can be read")
if label_form=='csv2txt':
#
print(1)
else:
shutil.copy(label_srcfile + i + '.csv', tra_label_dstpath + i + '.csv') # 复制文件 到 training/label
bar.next()
bar.finish()
bar = Bar('cluster test_data...', max=len(test_cluster), fill='#', suffix='%(percent)d%%')
for i in test_cluster:
if data_form == 'pcd':# 复制文件 到 testing/data
pcd2bin(data_srcfile + i + '.pcd', test_data_dstpath + i + '.bin')
elif data_form == 'bin':
shutil.copy(data_srcfile + i + '.bin', test_data_dstpath + i + '.bin')
else:
print("Unkown data form! 'bin' or 'pcd' can be read")
if label_form=='csv2txt':
#
print(1)
else:
shutil.copy(label_srcfile + i + '.csv', test_label_dstpath + i + '.csv') # 复制文件 到 testing/label
bar.next()
bar.finish()
def DataSplit(raw_data, get_precet):
# 获取数据长度,并生成相同长度索引
dataA = []
dataB = []
index_B = []
length = len(raw_data)
index_rawdata = np.arange(0, length, 1) # 连续索引
index_rawdata_copy = index_rawdata[:] # 复制一分
if get_precet < 1 and get_precet > 0:
get_num = math.floor(length * get_precet) # 向下取整 避免溢出
index_A = random.sample(range(0, length), get_num)
for j in index_A:
dataA.append(raw_data[j])
index_rawdata_copy[j] = -1
for k in index_rawdata_copy:
if k != -1:
index_B.append(k)
dataB.append(raw_data[k])
else:
print('Precentage out of range [0,1]')
return dataA, index_A, dataB, index_B
def read_pcd(filepath):
lidar = []
i=0
with open(filepath, 'r') as f:
line = f.readline().strip()
while line:
linestr = line.split(" ")
i = i + 1
if i>10:#skip pcd file head
if len(linestr) == 3:# only x,y,z
linestr_convert = list(map(float, linestr))
linestr_convert.append(0)
lidar.append(linestr_convert)
if len(linestr) == 4:# x,y,z,i
linestr_convert = list(map(float, linestr))
lidar.append(linestr_convert)
line = f.readline().strip()
return np.array(lidar)
def pcd2bin(pcd_fullname, bin_fullname):
pl = read_pcd(pcd_fullname)
pl = pl.reshape(-1, 4).astype(np.float32) # x,y,z,i
pl.tofile(bin_fullname)
if __name__ == '__main__':
Data_PreProcess("/data/OpenPCDet/data/rawdata/", 0.5, 0.3, 0.2, 'txt', 'bin')
四、最终形成的目录结构















 3237
3237











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









