







在github看到很多关于相机参数设置的的讨论, 这一篇就是对看到的内容做一个整理和总结,
一. 易混淆概念
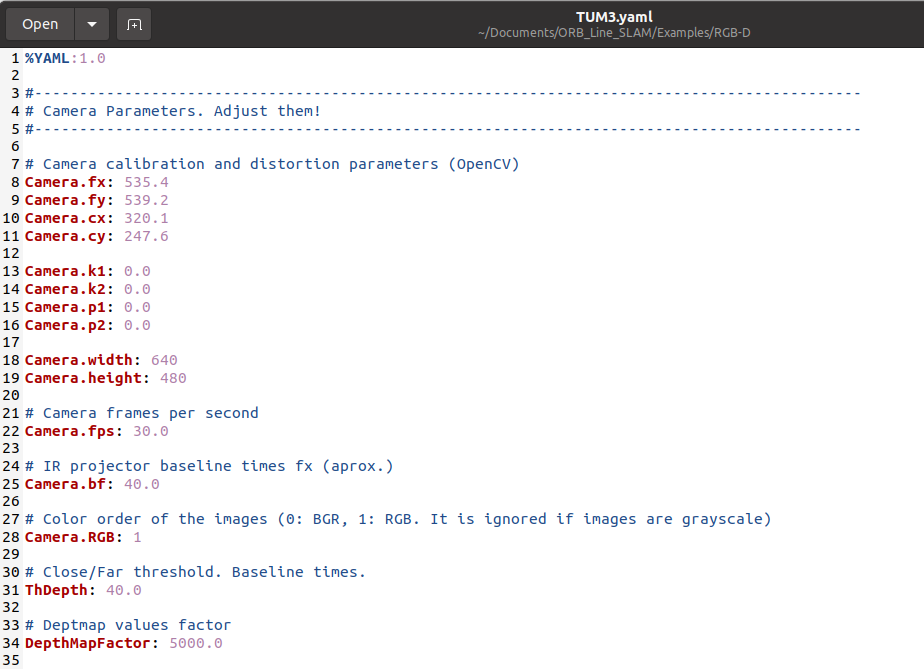
1.Camera.bf
根据文档的注释,这个参数是指的:基线距离(单位:米) * fx(单位:像素)
2.ThDepth
这是一个深度阈值,用于区分哪些特征点是近点,哪些是远点。关于更多的信息,可以参考我之前的笔记。
双目关键点
双目关键点的深度如果小于40倍基线长度的值,就被叫做近关键点,否则就是远关键点。近关键点可以较好的被三角化,并提供尺度,平移,旋转信息。而远关键点可以提供比较好的旋转信息,但只能有比较差的尺度和平移信息,远点用多视角进行三角化。
在YAML中,这个参数默认就是40,符合论文所提到的内容。根据作者本人在gitub的发言,这个阈值在50左右都是安全的。如果是用于不同的数据集,可以参考作者在不同YAML中的设定。
3. DepthMapFactor(用于RGBD)
DepthMapFactor是一个比例系数,根据TUM数据集官网的说明,对于RGB-D数据集,深度图像的缩放系数为5000,即深度图像中的像素值为5000,对应于离摄像机1米的距离,10000对应于2米的距离,等等。像素值为0意味着缺失值/没有数据。
二. 直接运行和在ROS下运行的区别
这一点是因为看到了有好几个issue都是在问,为什么同样的参数,同样的数据集,用两种方式跑下来,结果差很多。这一点是因为:1)在ros中也许出现了丢帧; 2)参数设置不当(通常会被忽略),在使用RGBD相机时,ROS的参数设置是要修改的。
根据官网的信息,直接运行时,DepthMapFactor=5000(对于16bit的PNG图片);而在ROS下运行时,DepthMapFactor=1(对于ROS bag文件中的32bit的浮点图)。
官网上还写了一个怎么从像素坐标算出3D点的代码,从这个代码更好理解为什么说DepthMapFactor是一个比例系数。
fx = 525.0 # focal length x
fy = 525.0 # focal length y
cx = 319.5 # optical center x
cy = 239.5 # optical center y
factor = 5000 # for the 16-bit PNG files
# OR: factor = 1 # for the 32-bit float images in the ROS bag files
for v in range(depth_image.height):
for u in range(depth_image.width):
Z = depth_image[v,u] / factor;
X = (u - cx) * Z / fx;
Y = (v - cy) * Z / fy;
三. TUM RGB-D数据集相关
这一小节是想记录一下在官网发现的一点小细节。
- 对于彩色图像
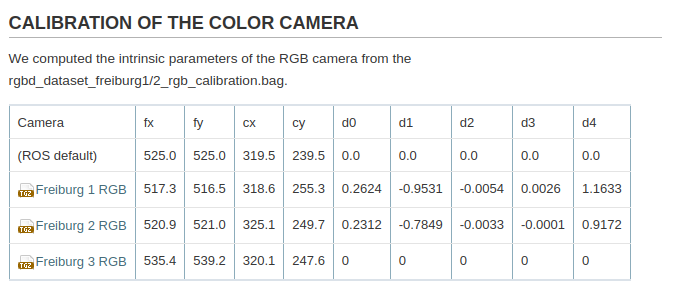 Freiburg 3序列的彩色和红外图像都已经过去畸变处理,因此畸变参数都为零。原始的畸变值可以在tgz文件中找到。
Freiburg 3序列的彩色和红外图像都已经过去畸变处理,因此畸变参数都为零。原始的畸变值可以在tgz文件中找到。
注意:我们建议使用ROS的默认参数集(即没有失真),因为对预注册的深度图像进行去畸变并非易事。
- 对于深度图像
通过比较报告的深度值和从RGB棋盘上估计的深度来验证深度值。在这个实验中,TUM的人发现来自Kinect的报告深度值偏离了一个恒定的比例系数,如下表所示。他们已经对所有序列的深度图像进行了相应的预缩放,所以你这边不需要任何操作。

参考资料:

















 721
721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









