








目录
一、理论基础
混合磁悬浮减振器是一种结合电磁悬浮和磁阻尼的新型减振器,具有高的振动隔离和阻尼性能特点,在航空航天、高速铁路等领域具有广泛的应用前景。本文提出一种基于模糊PID的混合磁悬浮减振器设计及控制方法。
混合磁悬浮减振器由电磁悬浮系统和磁阻尼系统组成。电磁悬浮系统通过控制电磁铁的电流,产生与振动方向相反的电磁力,实现振动的抵消与隔离。磁阻尼系统利用磁性材料的磁阻尼效应,通过控制磁场的变化,产生与振动方向相反的阻尼力,进一步提高减振效果。
模糊PID控制是一种将模糊逻辑与PID控制相结合的控制方法,具有对非线性系统的鲁棒性和适应性。通过将系统误差、误差变化等作为模糊逻辑输入,模糊PID控制器可以实现对PID参数的在线调整,提高系统的控制性能。
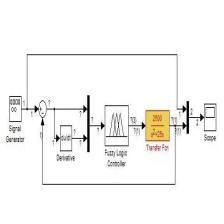
在混合磁悬浮减振器设计中,首先需要建立系统的数学模型。根据磁场和振动的耦合作用,可以建立电磁悬浮和磁阻尼系统的动力学模型。然后,通过模糊逻辑和PID控制器的设计,实现对混合磁悬浮减振器的控制。控制系统的结构框图如图所示。
其中,传感器负责实时监测减振器的振动情况,并将信号传输给模糊PID控制器;控制器根据输入信号和设定的减振目标,计算出电磁铁和磁阻尼系统的控制信号,并输出给执行器;执行器根据控制信号调节电磁铁和磁阻尼系统的参数,实现减振器的振动控制。
在控制过程中,模糊PID控制器是核心部件。根据模糊逻辑输入,控制器可以自动调整PID参数,实现对不同振源和工况下的最优控制。PID参数的调整公式可以表示为:
PID参数调整公式:
其中,Kp、Ki、Kd分别为比例、积分、微分系数;e(t)、de(t)分别为系统误差和误差变化;ΔTi、ΔTd为模糊逻辑输出,根据系统误差和误差变化的模糊逻辑输入计算得出;ΔKp、ΔKi、ΔKd为PID参数的调整量,根据模糊逻辑输出和PID参数调整规则计算得出。
在实际控制过程中,需要根据不同的振动工况和振源特性,确定模糊逻辑输入和输出变量的隶属函数、调整规则等参数。通过对这些参数的合理设置,可以提高混合磁悬浮减振器的减振效果。
此外,为了进一步提高混合磁悬浮减振器的性能,还可以采用一些先进的控制策略,如自适应控制、鲁棒控制等。这些控制策略可以与模糊PID控制相结合,实现对复杂工况和多变振源的有效控制。
总之,基于模糊PID的混合磁悬浮减振器设计及控制方法具有较高的应用价值和发展前景。通过合理的系统设计和参数优化,可以提高减振器的性能和适应性,满足不同领域对减振降噪的需求。
磁流变减振控制的阻尼具有可控性、非线性、滞后和饱和等特性,控制器的开发具有非常大的复杂性.结合磁流变阻尼控制器的控制原理以及设计功能进行模糊PID控制,提出采用三闭环磁流变阻尼控制系统的设计思路.包括加速度环、电压环和电流环,以保证控制系统的精度和实时性,本文详细介绍并进行了磁流变减振控制器的硬件电路设计和DSP控制系统的软件设计,对磁流变减振控制的台架试验.试验结果表明,磁流变阻尼控制器是准确可行的.
采用模糊自适应PID控制器的车辆行驶控制仿真设计,旨在解决前车自动跟车,接收前车传输的行驶状态,计算前方路况,实现自动驾驶控制的实现。主要设计过程是基于预览理论设计汽车的自动跟随模型并指定要跟随的物理量。模糊PID控制器设计控制方法跟踪给定的物理量,仿真结果为获得。该方法已被证明具有良好的鲁棒性,可确保智能汽车具有良好的路况计算和车辆跟踪精度。并且模糊PID人智能控制器比传统的PID控制器更健壮,控制精度更高。

这是减振系统的原理图

这是减振系统的电磁模块
电磁模块不太理解的话 我有参考文献供参考。
要求设计LQR控制器通过matlab作出 在外力干扰下

其中Xs,Xr,Xu本质上均为t的关系式。
这里,我们需要做一个假设,即Xr的二阶导数为0。(否则三个变量,两个方程,没法求解的)
这样,我们就可以建立关于地面位移的相对位移的方程式
于是上面的式子可以等效为:

 因此,这个系统满足振动系统的基本方程模式。
因此,这个系统满足振动系统的基本方程模式。

我们根据上面的模型,进行控制对象的建模,然后再基于这个控制对象,进行LQR控制器的设计,最后在Simulink中仿真实现。
这个式子和一般式子不同的是,他的方程右边有一个随着时间而发生变化的变量。
这个方程,我们用如下的式子表示:

假设系统的控制输出Z,那么Z的表达式为:


以上就是推导得到的系统的状态方程,下面我们基于这个状态方程计算对应的LQR控制器。
根据上面的式子,我们可以设计最优LQR控制器:
下面,我们讨论一下关于输入U1和U2,从方程上讲,U1和U2,就是对应的

这里,随时间变化的就是f这个变量,mg和fd为常量。
二、核心程序
clc;
clear;
close all;
warning off;
m1 = 25;
m2 = 20;
S = 0.009;
N = 500;
R = 1;
i0 = 0.2;
lnm = 64;
A = 5.12;
k1 = 0.3;
kd = 0.6;
c1 = 0.5;
cd = 0.3;
g = 9.18;
L0 = 1000;
k1s = -244043.62;
k2s = -5002.34;
k3s = -35.68;
m = 311.84;
z0 = 20;
u0 = 10;
Hc = 800;
hmp = 34;
ur = 10000;
%计算状态方程
AA1 = [0,0,m1,0;
0,0,0,m2;
m1,0,0,0;
0,m2,0,0;];
AA2= [-m1,0,0,0;
0,-m2,0,0;
0,0,k1,0;
0,0,0,kd];
AA = -inv(AA1)*AA2;
BB1= AA1;
BB2= [0,0;
0,0;
1,0;
0,1];
BB = inv(BB1)*BB2;
CC = [1,0,0,0;
0,1,0,0;
0,0,0,0;
0,0,0,0];
DD = [0,0;
0,0;
0,0;
0,0];
sys=ss(AA,BB,CC,DD)
Q = diag([5 1 2 6]);
R = eye(2);
k = LQR(AA,BB,Q,R);
%The LQR Controller
k11 = k(1,1);
k21 = k(1,2);
k31 = k(1,3);
k41 = k(1,4);
k12 = k(2,1);
k22 = k(2,2);
k32 = k(2,3);
k42 = k(2,4);

三、仿真测试结果

A08-29
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











