







✅博主简介:本人擅长建模仿真、数据分析、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。
新能源汽车的迅速发展带动了电动机控制技术的进步,其中永磁同步电机(PMSM)凭借其高效、节能、体积小、结构简单的优势,成为了该领域的主流选择。然而,尽管PMSM具备诸多优点,但在实际应用中,尤其是对新能源汽车驱动的控制系统,仍存在诸多挑战,如抖振、大超调、抗干扰能力差等问题。这些问题直接影响了车辆的稳定性、安全性以及驾驶的舒适性。为了提升PMSM的控制性能,控制算法的优化成为了研究的重点方向。基于此,本文探讨了PMSM控制算法,尤其是滑模控制算法的应用与改进。
首先,永磁同步电机的工作原理是基于同步转子的永磁体产生的磁场与定子绕组的电磁场相互作用来实现旋转驱动。PMSM的转子通常由稀土材料制造,这使得其具有极高的磁能积,因此在重量和体积上相比于传统的异步电机有明显优势。此外,PMSM的转矩和转速控制精度高,能够较好地满足新能源汽车对电机动态响应性能的需求。然而,尽管PMSM在结构和效率上有显著优势,控制算法的复杂性也相应增加。传统的PMSM控制方法,如矢量控制和直接转矩控制,虽然能够实现较好的稳态性能,但在动态过程中往往会面临大超调、抖振等问题,影响系统的整体性能。因此,如何改进现有控制算法,使得PMSM能够在动态性能上有更优表现,成为了当前研究的重点。
滑模控制(SMC)作为一种对系统参数不敏感的控制方法,因其在提高动态响应速度和系统鲁棒性方面的优势,逐渐成为PMSM控制算法中的热点。然而,滑模控制的不足之处也很明显,主要表现为系统抖振问题。在PMSM的速度控制系统中,抖振会导致电机转速的不稳定,进而影响整车的平稳运行。为了克服这一问题,本文在传统的滑模控制算法基础上,设计了一种基于改进型指数趋近律的滑模控制算法。通过对符号函数进行平滑处理,抑制了因开关频率过高导致的高频振荡现象。同时,利用MATLAB仿真对改进前后的算法进行了性能对比,结果表明,改进后的滑模控制器在减少超调和抑制抖振方面表现出明显优势。
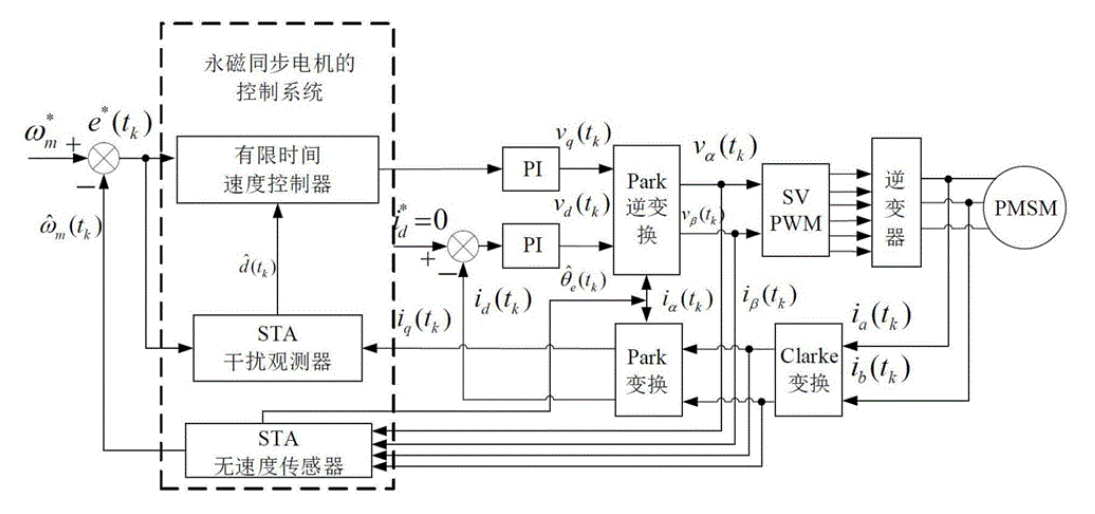
其次,PMSM控制系统的核心在于精确获取转子的位置和速度信息。传统的控制方法依赖于机械传感器,如编码器和测速器等,来实时获取电机的转速和位置信息。但这些传感器的使用不仅增加了系统的复杂性和成本,还容易受到外部干扰的影响,导致控制精度下降。针对这一问题,本文提出了一种基于无速度传感器的滑模观测器(SMO)算法。该算法通过对PMSM的电流和电压进行实时观测,采用滑模变结构的方法来估算转子的位置信息,减少了对传统机械传感器的依赖。滑模观测器在观测过程中能够有效滤除噪声,并且具有较强的鲁棒性,保证了系统在复杂环境下的稳定运行。
此外,滑模观测器中的锁相环技术也进行了改进,设计了一种基于饱和函数的锁相环滑模观测器。通过用饱和函数替代传统的开关函数,显著减少了高频信号切换引起的系统抖振问题,同时提高了位置信息的估算精度。具体而言,锁相环通过电机的电流和电压信号,推算出转子的转速和角度信息,能够在电机工作过程中对位置和速度进行精准跟踪。这种基于无速度传感器的滑模观测器,结合饱和函数的优化设计,使得系统能够在不依赖机械传感器的情况下实现高精度的速度和位置估算,减少了系统的硬件复杂度,并且提升了动态响应速度和抗干扰能力。
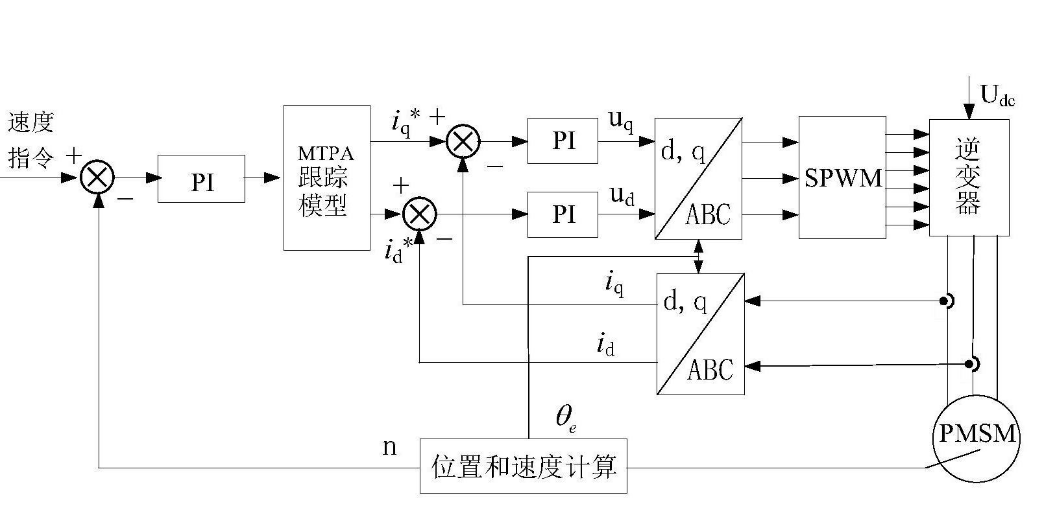
在控制算法的优化设计中,本文还特别关注了矢量控制方法的应用。矢量控制是目前PMSM控制中的主流方法之一,通过对定子电流进行解耦控制,实现对转矩和磁链的独立调节。然而,传统的矢量控制方法在处理非线性动态系统时,容易出现超调、振荡等现象。为了解决这些问题,本文将改进后的滑模控制算法与矢量控制相结合,通过动态调整控制参数,使得系统能够快速响应外部干扰,减少转速波动,提升了电机的稳态和动态性能。仿真结果表明,经过改进后的矢量控制算法在保持系统稳定性的同时,显著提升了动态响应性能,减少了超调和振荡。
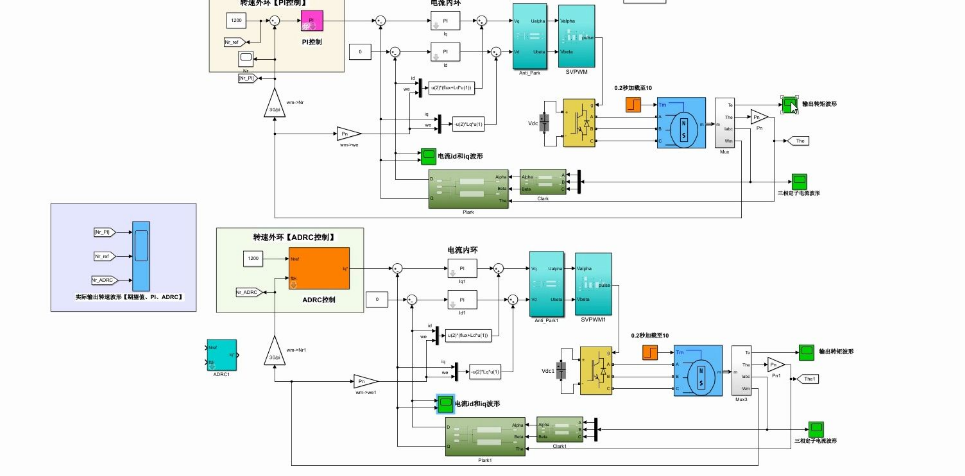
最后,本文还通过MATLAB/Simulink平台搭建了一个完整的PMSM矢量控制仿真系统。在仿真中,通过模拟不同工况下的电机运行,验证了本文提出的滑模控制算法和滑模观测器在实际应用中的有效性。实验结果显示,改进后的控制算法能够在复杂工况下快速收敛,显著减少了速度和位置的估算误差,提升了系统的鲁棒性和抗干扰能力。此外,该仿真平台还可以进一步扩展,用于其他类型电机的控制算法验证和优化设计,具有广泛的应用前景。
import numpy as np
import matplotlib.pyplot as plt
# PMSM参数定义
class PMSM:
def __init__(self, Ld, Lq, Rs, Psi_f, J, B, pole_pairs):
self.Ld = Ld # 电感
self.Lq = Lq # 电感
self.Rs = Rs # 电阻
self.Psi_f = Psi_f # 永磁体磁链
self.J = J # 转动惯量
self.B = B # 阻尼系数
self.pole_pairs = pole_pairs # 极对数
self.id = 0 # d轴电流
self.iq = 0 # q轴电流
self.theta = 0 # 转子位置
self.omega = 0 # 转速
def update(self, vd, vq, dt):
# 电机方程的更新,基于滑模控制算法
did_dt = (vd - self.Rs * self.id + self.omega * self.Lq * self.iq) / self.Ld
diq_dt = (vq - self.Rs * self.iq - self.omega * self.Ld * self.id - self.omega * self.Psi_f) / self.Lq
self.id += did_dt * dt
self.iq += diq_dt * dt
torque = 1.5 * self.pole_pairs * (self.Psi_f * self.iq + (self.Ld - self.Lq) * self.id * self.iq)
domega_dt = (torque - self.B * self.omega) / self.J
self.omega += domega_dt * dt
self.theta += self.omega * dt
# 滑模控制器
class SlidingModeController:
def __init__(self, K, lambda_):
self.K = K # 控制增益
self.lambda_ = lambda_ # 斜率
def control(self, error, error_dot):
s = error_dot + self.lambda_ * error
u = -self.K * np.sign(s) # 滑模控制律
return u
# 仿真主程序
def simulate():
# 电机参数定义
pmsm = PMSM(Ld=0.01, Lq=0.01, Rs=0.1, Psi_f=0.1, J=0.01, B=0.001, pole_pairs=4)
smc = SlidingModeController(K=0.5, lambda_=1.0)
# 仿真参数
t_end = 1.0
dt = 0.001
time_steps = np.arange(0, t_end, dt)
# 数据存储
omega_data = []
theta_data = []
# 初始目标转速
omega_ref = 100.0
for t in time_steps:
error = omega_ref - pmsm.omega
error_dot = -pmsm.omega
# 计算控制输入
vq = smc.control(error, error_dot)
vd = 0 # 简化处理
# 更新电机状态
pmsm.update(vd, vq, dt)
# 存储数据
omega_data.append(pmsm.omega)
theta_data.append(pmsm.theta)
# 绘制仿真结果
plt.plot(time_steps, omega_data)
plt.title("PMSM转速曲线")
plt.xlabel("时间 (s)")
plt.ylabel("转速 (rad/s)")
plt.show()
if __name__ == '__main__':
simulate()


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











