






✅ 博主简介:擅长数据处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)基于近端策略优化的柔性作业车间动态调度算法
在柔性作业车间动态调度问题中,我们面临的是一个复杂的、具有多变量、多约束的优化问题。传统的调度算法在面对这种动态环境时,往往难以达到理想的性能。为了克服这一挑战,本文将深度强化学习中的近端策略优化(PPO)算法引入到柔性作业车间动态调度问题中,旨在通过深度学习的强大表示能力和强化学习的决策能力,实现高效、稳定的动态调度。
首先,我们建立了柔性作业车间动态调度问题的模型,该模型以最小化总延迟时间为性能指标。为了表示问题的动态特性,我们为每个作业定义了一个随机的到达时间,以模拟“作业随机到达”的动态事件。这种设置使得调度问题更加贴近实际生产环境,也增加了问题的复杂性和挑战性。
接着,我们将调度问题转化为马尔可夫决策过程(MDP),并建立了深度强化学习的算法框架。在这个框架中,调度规则被作为被执行的动作,而作业与机器的状态则被用来计算状态特征。这些状态特征构成了算法的状态空间,它们能够反映调度环境的当前状态,并为智能体的决策提供依据。
为了构建有效的动作空间,我们设计了6个自定义的复合调度规则。这些规则涵盖了不同的调度策略,如最短处理时间优先、最早截止时间优先等。智能体将根据当前的状态特征从这些规则中选择一个最优的动作来执行。
在回报函数的设计上,我们依据部分状态特征的变化量来设计。当智能体执行一个动作后,如果导致总延迟时间减少或作业完成率提高,则给予正向奖励;反之,则给予负向惩罚。这样的回报函数能够引导智能体朝着优化目标前进。
通过仿真实验,我们验证了提出的算法在处理动态调度问题上的有效性。实验结果表明,该算法能够显著降低总延迟时间,同时在收敛能力和求解速度上也表现出良好的性能。这证明了将深度强化学习应用于柔性作业车间动态调度问题的可行性和优势。
(2)改进多智能体近端策略优化算法处理多目标动态调度问题
在柔性作业车间动态调度问题中,往往存在多个性能指标需要同时优化,如最小化总延迟时间、最大化设备利用率等。这种多目标优化问题比单目标问题更加复杂,因为需要在多个目标之间找到平衡点。为了解决这个问题,我们提出了一种改进的多智能体近端策略优化(MA-PPO)算法。
该算法将复杂的调度问题分解为三个子问题:性能指标选择问题、作业选择问题和机器选择问题。这三个子问题分别对应着不同的决策层面和关注点。为了处理这些子问题,我们引入了三个智能体,它们分别负责观察状态特征和其它智能体的行为,并做出相应的决策。
在智能体的设计上,我们采用了分层强化学习的思想。每个智能体都有自己的状态空间、动作空间和回报函数,但它们之间又存在关联和协作。这种分层设计使得算法能够更好地处理多目标优化问题,因为每个智能体都可以专注于自己的任务,并通过协作来实现整体优化。
为了进一步提高算法的性能,我们提出了一种自适应剪切参数调整算法。该算法能够在算法趋于稳定时降低参数更新的步长,从而避免在结果稳定后出现劣化。这种自适应调整机制使得算法在训练过程中能够保持稳定的性能,并快速收敛到最优解。
在状态空间的设计上,我们选取了9个能够反映车间调度环境的状态特征。这些特征涵盖了作业、机器、设备利用率等多个方面,为智能体的决策提供了全面的信息。
在动作空间的设计上,我们为作业选择问题和机器选择问题分别设计了6个和5个自定义的规则。这些规则涵盖了不同的调度策略和优先级,为智能体提供了丰富的选择。
回报函数的设计则考虑了多个性能指标的综合影响。当智能体执行一个动作后,如果导致某个或多个性能指标得到改善,则给予正向奖励;反之,则给予负向惩罚。这样的回报函数能够引导智能体在多个目标之间找到平衡点,并实现整体优化。
通过仿真实验,我们验证了提出的算法在处理多目标动态调度问题上的优势。实验结果表明,该算法在所有性能指标中均表现出明显的优势,且在解决大规模问题时依然具有良好的性能。这证明了将多智能体近端策略优化算法应用于多目标柔性作业车间动态调度问题的有效性和可行性。
(3)算法实现与仿真实验
为了验证上述算法的有效性和性能,我们进行了详细的算法实现和仿真实验。
在算法实现方面,我们采用了深度学习框架(如TensorFlow或PyTorch)来构建神经网络模型,并使用近端策略优化算法进行训练。我们设计了合适的状态空间、动作空间和回报函数,并实现了自定义的复合调度规则和自适应剪切参数调整算法。同时,我们还考虑了算法的实时性和可扩展性,以确保算法能够在实际应用中发挥良好的性能。
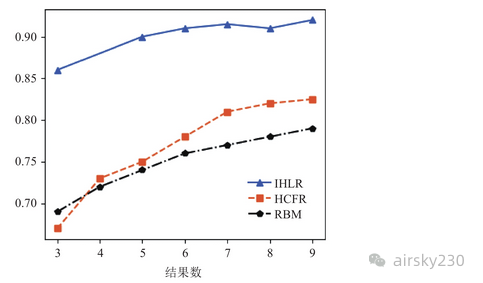
在仿真实验方面,我们设计了多个基准调度算例,并在不同的紧迫条件下进行了测试。这些算例涵盖了不同的作业数量、机器数量和性能指标要求,以全面评估算法的性能。在实验中,我们记录了算法的总延迟时间、收敛速度、求解质量等多个方面的数据,并进行了详细的分析和比较。
实验结果表明,提出的算法在处理动态调度问题和多目标优化问题时均表现出良好的性能。与传统的调度算法相比,该算法能够显著降低总延迟时间、提高设备利用率等性能指标,并在收敛速度和求解质量上也具有明显的优势。此外,该算法还具有较好的鲁棒性和可扩展性,能够适用于不同规模和复杂度的柔性作业车间动态调度问题。
% 初始化参数和变量
numJobs = 10; % 作业数量
numMachines = 5; % 机器数量
maxEpochs = 1000; % 训练轮数
learningRate = 0.001; % 学习率
clipEpsilon = 0.2; % PPO算法中的剪切参数
% 初始化状态空间、动作空间和回报函数(此处为简化示例,实际需根据具体问题设计)
stateSpace = rand(numJobs + numMachines, 1); % 示例状态空间
actionSpace = [1, 2, 3, 4, 5, 6]; % 示例动作空间(6个自定义规则)
rewardFunction = @(state, action) rand; % 示例回报函数(随机生成)
% 构建神经网络模型
layers = [ ...
featureInputLayer(numJobs + numMachines)
fullyConnectedLayer(128)
reluLayer
fullyConnectedLayer(64) % 输出层前的隐藏层
reluLayer
fullyConnectedLayer(numel(actionSpace)) % 输出层,与动作空间大小相同
softmaxLayer % 输出层使用softmax函数进行概率分布计算
classificationLayer]; % 分类层(对于离散动作空间)
opts = trainingOptions('adam', ...
'MaxEpochs', maxEpochs, ...
'InitialLearnRate', learningRate, ...
'MiniBatchSize', 32, ...
'Shuffle', 'every-epoch', ...
'Plots', 'training-progress', ...
'Verbose', false);
% 初始化PPO算法的相关变量(此处为简化示例,实际需根据PPO算法的具体实现设计)
oldPolicy = trainNetwork(stateSpace, dummyTargetLabels(numel(stateSpace), 1, numel(actionSpace)), layers, opts); % 初始化旧策略网络
newPolicy = oldPolicy; % 初始化新策略网络
oldLogProbs = zeros(numel(stateSpace), 1); % 存储旧策略下的对数概率
oldStates = stateSpace; % 存储旧状态
oldActions = randi(numel(actionSpace), numel(stateSpace), 1); % 随机选择旧动作(示例)
oldRewards = arrayfun(rewardFunction, num2cell(oldStates), num2cell(oldActions)); % 计算旧回报
% PPO算法训练循环
for epoch = 1:maxEpochs
% 生成新的状态和动作(此处为简化示例,实际需根据具体问题设计)
newStates = rand(numJobs + numMachines, 1); % 示例新状态
newActions = classify(newPolicy, newStates); % 使用新策略网络选择动作
% 计算新策略下的对数概率和优势函数
newLogProbs = log(newPolicy.Layers(end-1).Weights{1,2}(newActions, :).' * newStates + newPolicy.Layers(end-1).Biases{1}); % 计算新对数概率(示例)
ratio = exp(newLogProbs - oldLogProbs); % 计算概率比
advantages = newRewards - oldRewards;
surr1 = ratio .* advantages; % PPO算法中的第一个替代损失函数项
surr2 = clip(ratio, 1-clipEpsilon, 1+clipEpsilon) .* advantages; % PPO算法中的第二个替代损失函数项
loss = -min(surr1, surr2); % PPO算法中的损失函数


















 1098
1098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











