






pcl --- Module filters
https://pointclouds.org/documentation/group__filters.html
点云数据类型
sensor_msgs::LaserScan
sensor_msgs::PointCloud — ROS message (deprecated)
sensor_msgs::PointCloud2 — ROS message
pcl::PCLPointCloud2 — PCL data structure mostly for compatibility with ROS
pcl::PointCloud<T> — standard PCL data structure
sensor_msgs::LaserScan
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
sensor_msgs::PointCloud2
std_msgs/Header header
uint32 seq
time stamp
string frame_id
uint32 height //点云的高度,如果是无序点云,则为1
uint32 width //每行点云的宽度
sensor_msgs/PointField[] fields
uint8 INT8=1
uint8 UINT8=2
uint8 INT16=3
uint8 UINT16=4
uint8 INT32=5
uint8 UINT32=6
uint8 FLOAT32=7
uint8 FLOAT64=8
string name
uint32 offset
uint8 datatype
uint32 count
bool is_bigendian
uint32 point_step //每个点占用的比特数,1个字节对应8个比特数
uint32 row_step //每一行占用的比特数
uint8[] data //为序列化后的数据,直接获得不了信息,序列化是为了方便信息传输和交换,使用时需要反序列化
bool is_dense //是否有非法数据点,true表示没有
pcl::PCLPointCloud2
namespace pcl
{
struct PCLPointCloud2
{
PCLPointCloud2 () : header (), height (0), width (0), fields (),
is_bigendian (false), point_step (0), row_step (0),
data (), is_dense (false)
{
#if defined(BOOST_BIG_ENDIAN)
is_bigendian = true;
#elif defined(BOOST_LITTLE_ENDIAN)
is_bigendian = false;
#else
#error "unable to determine system endianness"
#endif
}
::pcl::PCLHeader header;
pcl::uint32_t height;
pcl::uint32_t width;
std::vector< ::pcl::PCLPointField> fields;
pcl::uint8_t is_bigendian;
pcl::uint32_t point_step;
pcl::uint32_t row_step;
std::vector<pcl::uint8_t> data;
pcl::uint8_t is_dense;
public:
typedef boost::shared_ptr< ::pcl::PCLPointCloud2> Ptr;
typedef boost::shared_ptr< ::pcl::PCLPointCloud2 const> ConstPtr;
}; // struct PCLPointCloud2
typedef boost::shared_ptr< ::pcl::PCLPointCloud2> PCLPointCloud2Ptr;
typedef boost::shared_ptr< ::pcl::PCLPointCloud2 const> PCLPointCloud2ConstPtr;
}
pcl::PCLPointCloud2 是 ROS(机器人操作系统)消息类型,取代旧的 sensors_msgs::PointCloud2。因此,它只能在与 ROS 进行交互时使用。
PCLPointCloud2 --- PointCloud转化
// 从 PCLPointCloud2 转化为 PointCloud
void fromPCLPointCloud2(const pcl::PCLPointCloud2& msg, cl::PointCloud<PointT>& cloud);
// 内部调用 fromPCLPointCloud2 函数
void fromROSMsg (const pcl::PCLPointCloud2& msg, pcl::PointCloud<PointT>& cloud);
// 从 PointCloud 转化为 PCLPointCloud2
void toPCLPointCloud2(const pcl::PointCloud<PointT>& cloud, pcl::PCLPointCloud2& msg);
// 内部调用 toPCLPointCloud2 函数
void toROSMsg (const pcl::PointCloud<PointT>& cloud, pcl::PCLPointCloud2& msg);
1.体素网格滤波
pcl::VoxelGrid< pcl::PCLPointCloud2 > Class Reference
Definition at line 513 of file voxel_grid.h.
构造函数
VoxelGrid () :
leaf_size_ (Eigen::Vector4f::Zero ()),
inverse_leaf_size_ (Eigen::Array4f::Zero ()),
downsample_all_data_ (true),
save_leaf_layout_ (false),
min_b_ (Eigen::Vector4i::Zero ()),
max_b_ (Eigen::Vector4i::Zero ()),
div_b_ (Eigen::Vector4i::Zero ()),
divb_mul_ (Eigen::Vector4i::Zero ()),
filter_field_name_ (""),
filter_limit_min_ (std::numeric_limits<float>::lowest()),
filter_limit_max_ (std::numeric_limits<float>::max()),
filter_limit_negative_ (false),
min_points_per_voxel_ (0)
{
filter_name_ = "VoxelGrid";
}setLeafSize()
/** \brief Set the voxel grid leaf size.
* \param[in] leaf_size the voxel grid leaf size
*/
inline void
setLeafSize (const Eigen::Vector4f &leaf_size)
{
leaf_size_ = leaf_size;
// Avoid division errors
if (leaf_size_[3] == 0)
leaf_size_[3] = 1;
// Use multiplications instead of divisions
inverse_leaf_size_ = Eigen::Array4f::Ones () / leaf_size_.array ();
}
/** \brief Set the voxel grid leaf size.
* \param[in] lx the leaf size for X
* \param[in] ly the leaf size for Y
* \param[in] lz the leaf size for Z
*/
inline void
setLeafSize (float lx, float ly, float lz)
{
leaf_size_[0] = lx; leaf_size_[1] = ly; leaf_size_[2] = lz;
// Avoid division errors
if (leaf_size_[3] == 0)
leaf_size_[3] = 1;
// Use multiplications instead of divisions
inverse_leaf_size_ = Eigen::Array4f::Ones () / leaf_size_.array ();
}setInputCloud()
template <typename PointT> void
pcl::PCLBase<PointT>::setInputCloud (const PointCloudConstPtr &cloud)
{
input_ = cloud;
}filter()
void pcl::Filter< PointT >::filter ( PointCloud & output )
Calls the filtering method and returns the filtered dataset in output.
Parameters
[out] output the resultant filtered point cloud dataset 测试
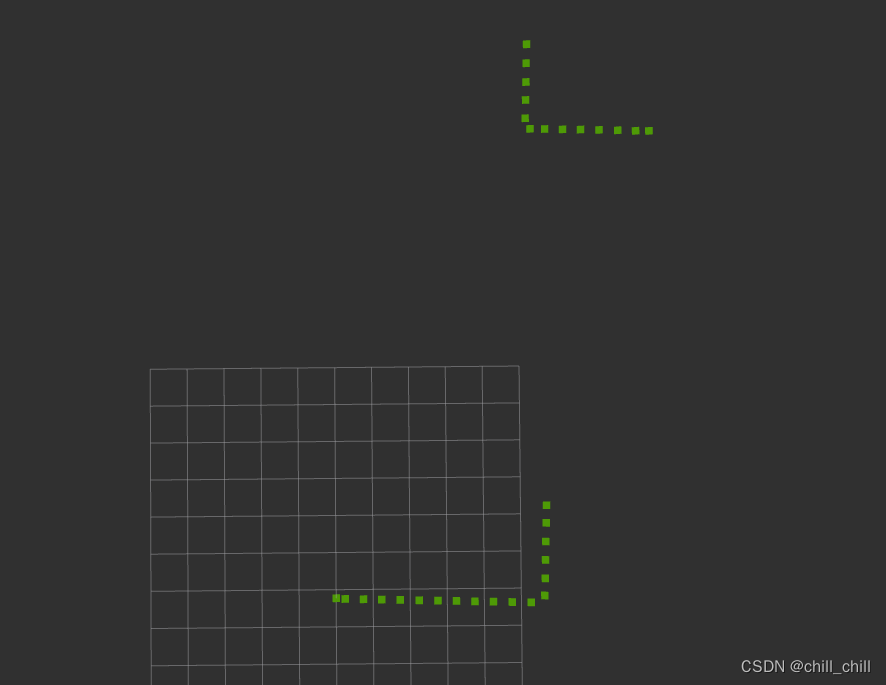
pcl::VoxelGrid<pcl::PCLPointCloud2> downsample_filter;
downsample_filter.setLeafSize(0.1, 0.1, 0.1);
downsample_filter.setDownsampleAllData(true);
downsample_filter.setInputCloud(cloudPtr);
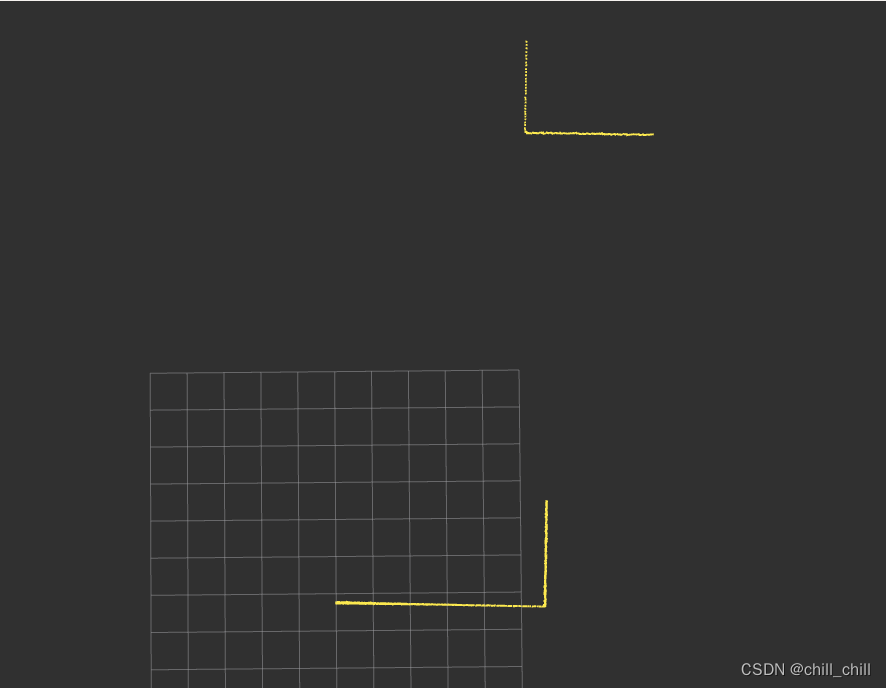
downsample_filter.filter(cloud_filtered); 原始点云
2.直通滤波
setFilterFieldName ()
void setFilterFieldName (const std::string &field_name)
Provide the name of the field to be used for filtering data.
In conjunction with setFilterLimits, points having values outside this interval will be discarded.
Parameters
[in] field_name the name of the field that contains values used for filtering 测试
pcl::PassThrough<pcl::PCLPointCloud2> pass; //创建滤波器对象
pass.setInputCloud(cloud_in); //设置待滤波的点云
pass.setFilterFieldName ("x"); //设置在x轴方向上进行滤波
// pass.setNegative(false); //false:保留当前范围内数据;true:取反;
pass.setFilterLimits (3., 10.); //设置滤波范围为min~max,在范围之外的点会被剪除
pass.filter (cloud_out); //存储 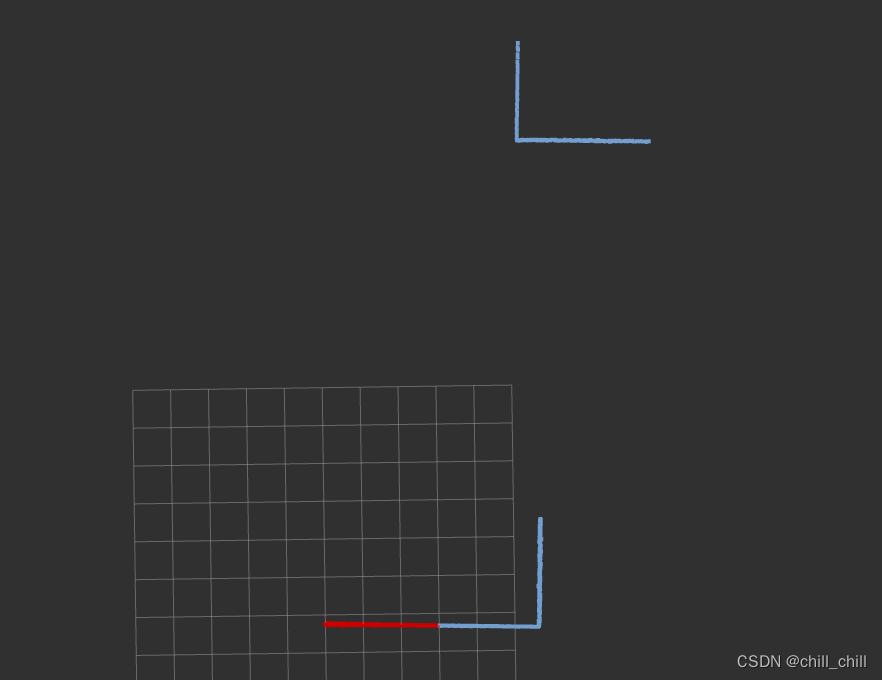
3.半径滤波
void setRadiusSearch(double radius)
Set the sphere radius that is to be used for determining the k-nearest neighbors for filtering.
Parameters
radius the sphere radius that is to contain all k-nearest neighbors setMinNeighborsInRadius(int min_pts)
Set the minimum number of neighbors that a point needs to have in the given search radius in order to be considered an inlier (i.e., valid).
Parameters
min_pts the minimum number of neighbors 测试
pcl::RadiusOutlierRemoval<pcl::PCLPointCloud2> outrem; // 创建滤波器
outrem.setInputCloud(cloud_in); //设置输入点云
/****搜索半径设为radius,在此半径内点必须要有至少num个邻居时,此点才会被保留***/
outrem.setRadiusSearch(0.5); //设置在radius半径的范围内找邻近点
outrem.setMinNeighborsInRadius(100); //设置查询点的邻近点集数小于num的删除
outrem.filter(cloud_out); //执行条件滤波,存储结果到cloud_filter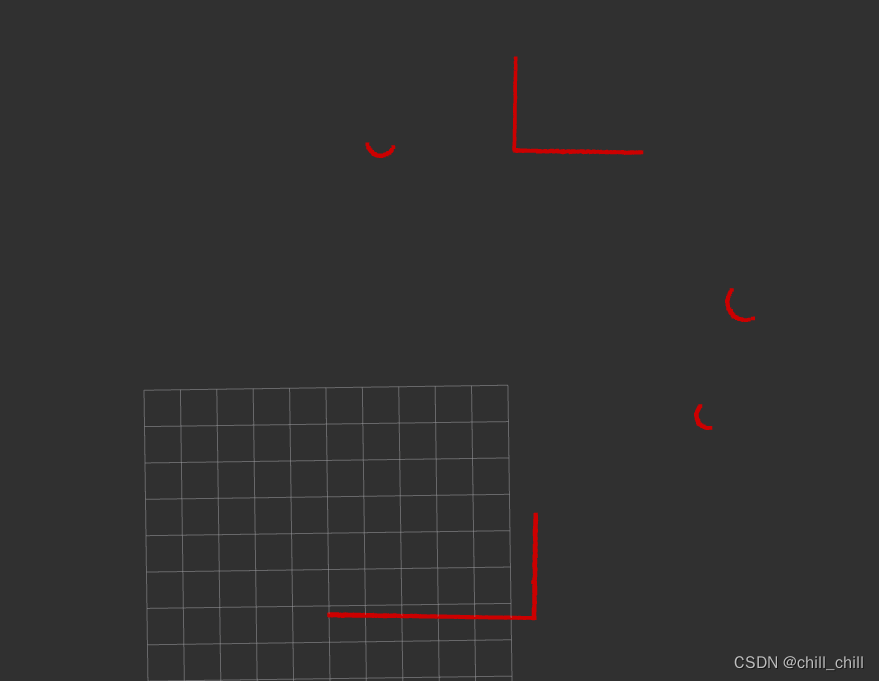
4.统计滤波器
void setMeanK(int nr_k)
Set the number of points (k) to use for mean distance estimation.
Parameters
nr_k the number of points to use for mean distance estimation setStddevMulThresh(0.5)
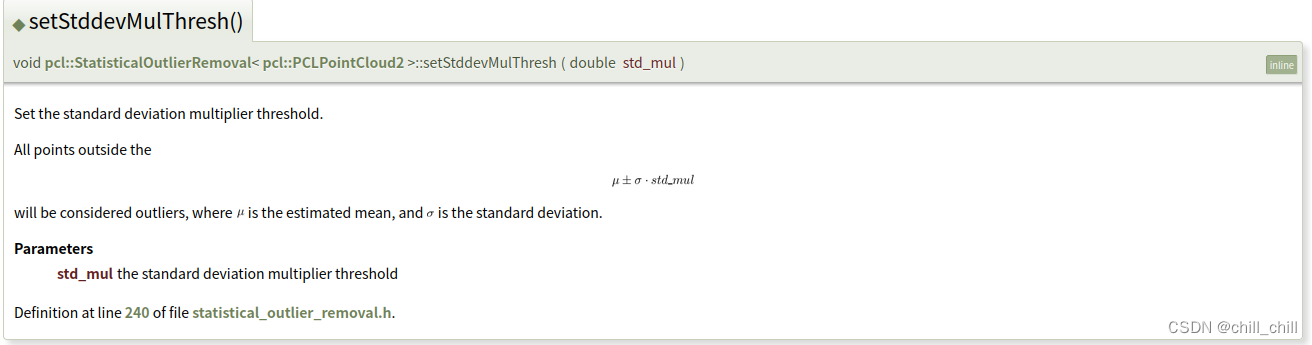
测试
pcl::StatisticalOutlierRemoval<pcl::PCLPointCloud2> Static; //创建滤波器对象
Static.setInputCloud(cloud_in); //设置待滤波的点云
Static.setMeanK(50); //设置在进行统计时考虑查询点临近点数
Static.setStddevMulThresh(0.5); //设置判断是否为离群点的阈值
Static.filter(cloud_out); //存储















 6919
6919











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









