






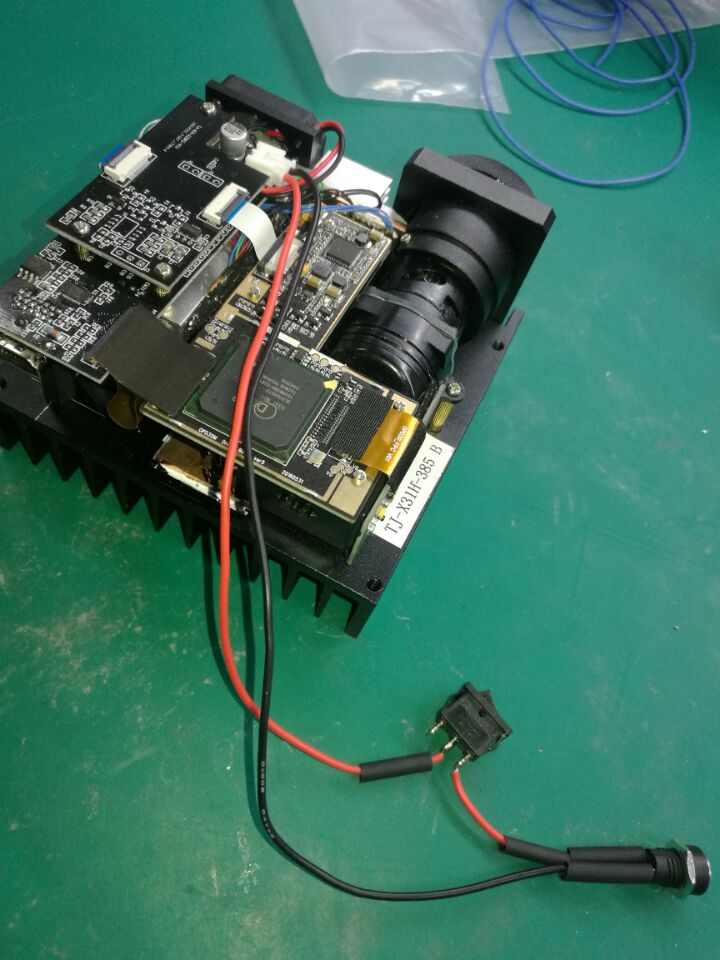
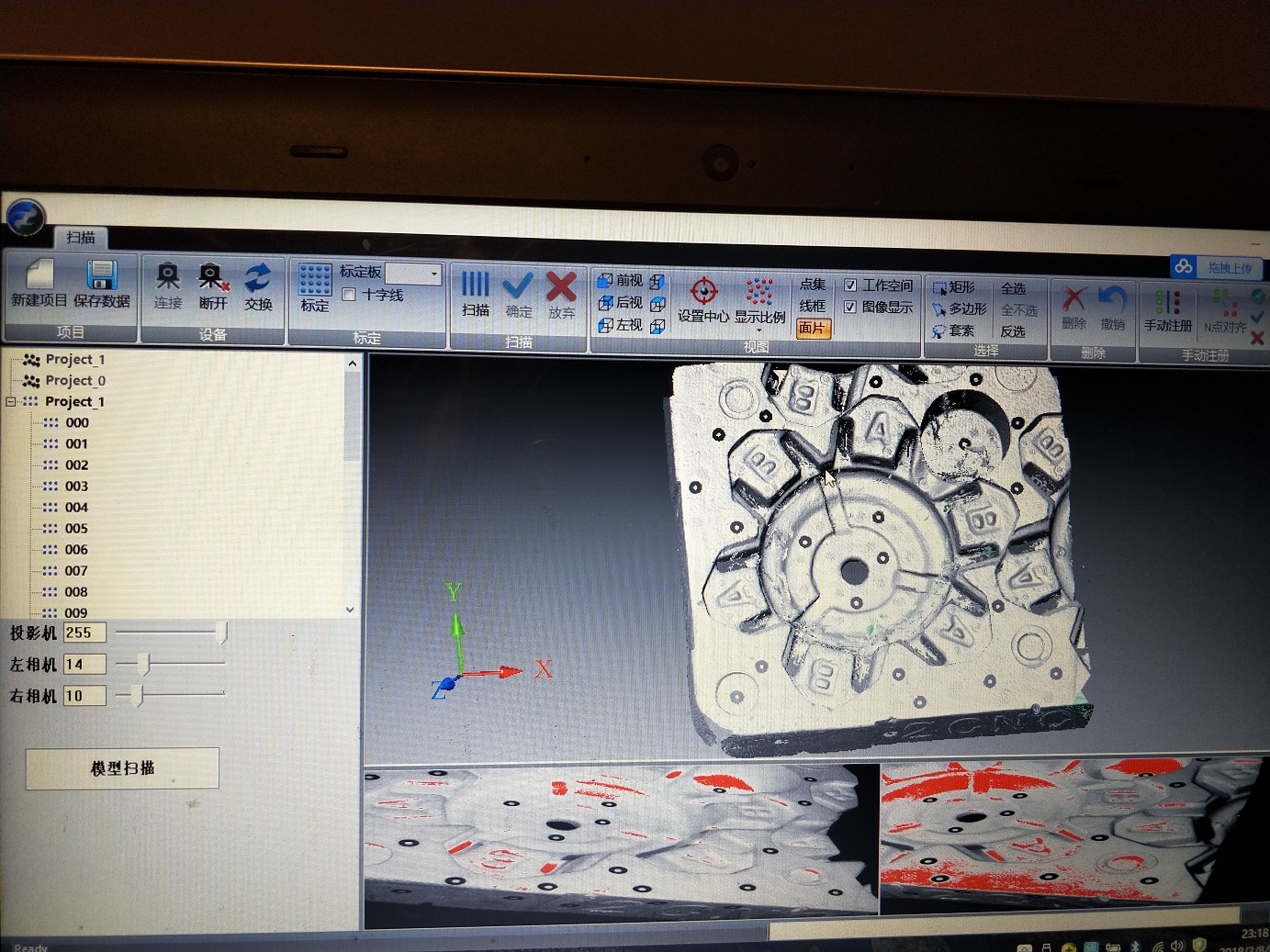
最近将扫描系统的投影仪更换成了蓝光投影仪,蓝光投影仪的好处就是抗干扰比白光要好,尤其的在扫描物体有反光的情况下,而且出来的点云也比白光要光顺一些,缺点就是亮度没有白光的好。硬件设备和扫描效果见下图所示。
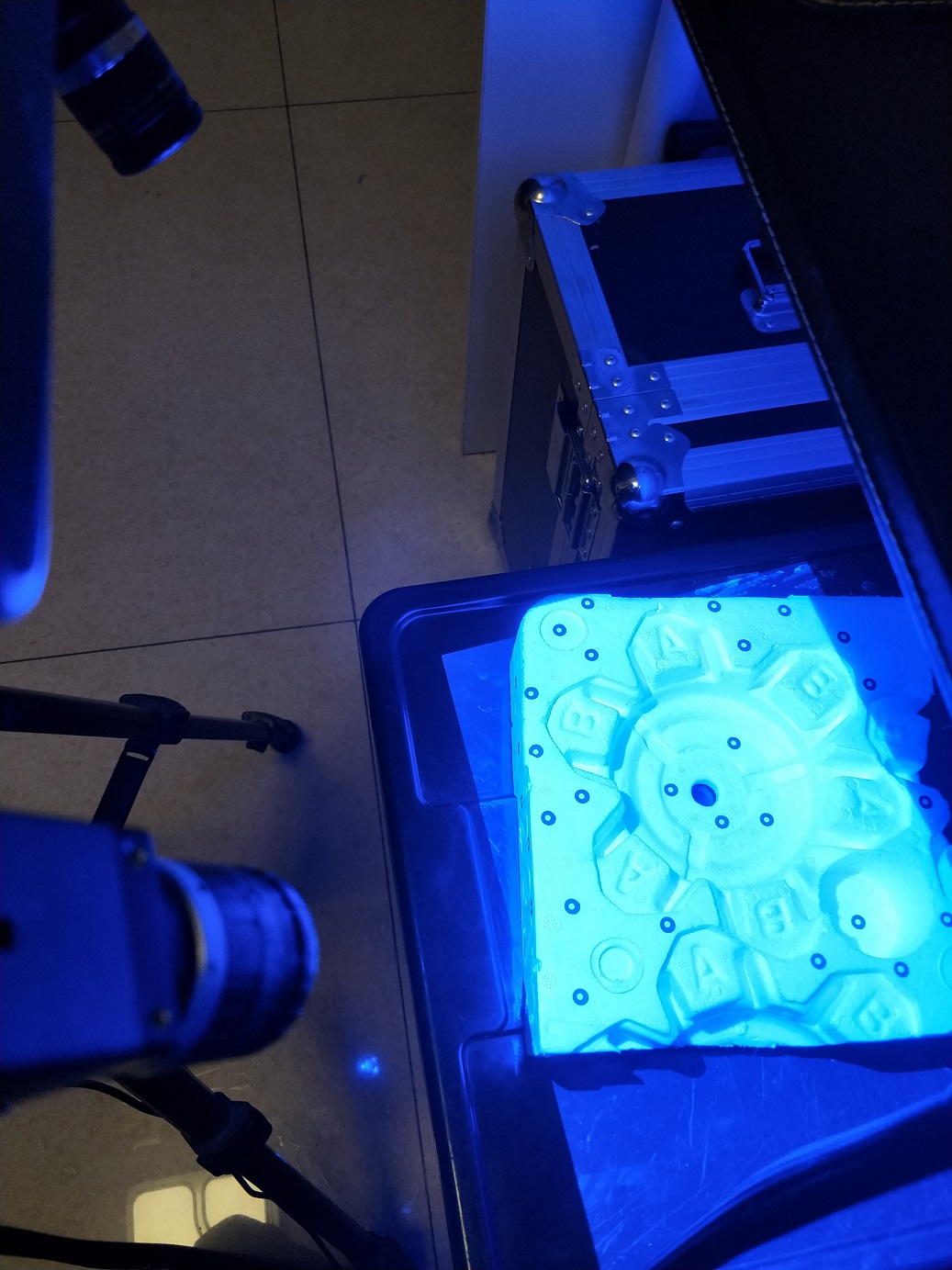
交流加QQ:1264768501

最近将扫描系统的投影仪更换成了蓝光投影仪,蓝光投影仪的好处就是抗干扰比白光要好,尤其的在扫描物体有反光的情况下,而且出来的点云也比白光要光顺一些,缺点就是亮度没有白光的好。硬件设备和扫描效果见下图所示。
交流加QQ:1264768501
 1299
3295
1299
3295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























