






我的专栏目录
小IVan:专题概述及目录
还是先上效果吧
目前(2018年)在游戏中,通常使用韦尔莱积分做动力学模拟。使用韦尔莱积分可以模拟大部分物体的运动。布料,绳子,弹簧,软体,棍子都可以模拟。但是神奇的是,国内几乎找不到什么资料,找到稀少的仅有几篇看了也做不出东西或者不理解。本节将由浅入深一步一步实现各种动力学模拟的效果。
本人只是一个美术,如有错误还请各路大神斧正。
本文的实现环境是:虚幻4引擎 4.19 和VS2017
下面都是c++代码,翻译成c#在unity里也同样适用。
下面是本文的小结顺序:
(1)韦尔莱积分的原理及推导
(2)我们的第一个动力学小球
(3)棍子模拟
(4)三角形稳定的几何结构模拟
(5)约束
(6)布料模拟
(7)发散总结
【1】韦尔莱积分的原理和推导
这里有一篇纯数学的推导
关于verlet算法,有人可以简单地讲解下吗?
但是我看了以后还是感觉有点迷,所以我再来按照我的思路再推导一次
首先先考虑一个质点。一个质点的运动在游戏里其实每帧是位置的改变,我们有一个球,在时间 t 的时候在A位置,在时间 t'’ 的时候在B位置。我们需要按照一定的方法把它从A位置移动到B位置即可,这就是我们的核心诉求。为了模拟真实世界,所以我们的移动方式需要遵循物理定律,这时候我们就把牛顿老爷子的运动三定律请出来了,我们使用运动三定律来移动我们的质点。
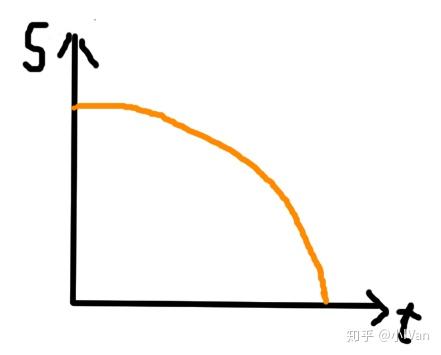
先来一张S-T图,以一个简单的平抛运动为例(规定向上为S正方向)
设:
时间为 
路程为 
速度为 
 时刻的位置为
时刻的位置为 
此时刻的速度为 
 均为向量
均为向量
将  用泰勒展开式展开
用泰勒展开式展开

由图1所示,速度是s-t函数的一阶导数,加速度是s-t的二阶导数,所以:


又由牛顿第二定律:

f为力,m为质量,a为加速度
所以等式可以化简为

同理  可以化简为:
可以化简为:

由 (1)+(2)可得:

这里为什么可以省略约等呢,因为我们的精度要求没那么高,余项的值其实很小可以忽略。
再整理一下
 为质点新的位置
为质点新的位置 
 为质点现在的位置
为质点现在的位置 
 为质点老的位置
为质点老的位置 
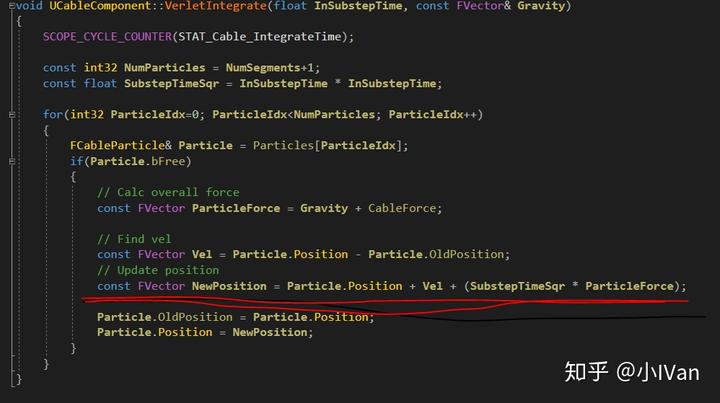
所以我们的代码就可以写成:

代码如下:
【2】我们第一个动力学小球
现在我们有了移动一个质点的物理学方法了,但是这还仅仅不够,我们仅仅有了一个移动质点的方法,我们现在还需要一个质点莱给我们移动,还需要显示它,还需要时间来驱动这个公式。
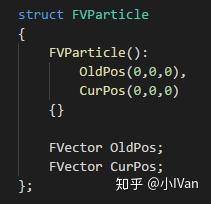
下面第一步,我们要先有一个质点,所以我们定义了一个质点类型
然后定义了一个组件

在这个组件中,声明一个质点数TestParticles数组和一个力ForceDir
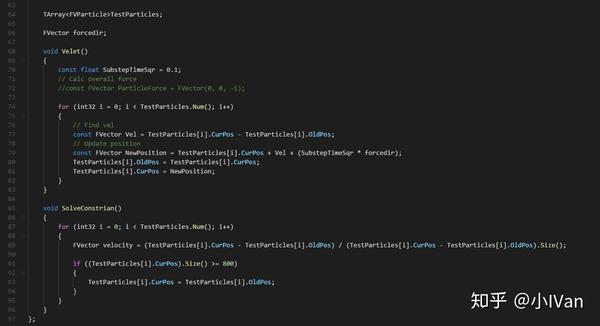
然后是我们的Velet函数,这个函数就是运行我们韦尔莱积分的函数了。为了不让我们的质点掉到无限远处,所以我用一个SolveConstrain函数来限定它,当它到达我定义的地面高度时,新的位置 = 老的位置,这样就相当于它停下不动了。
在组件的构造函数中出事话这些成员变量
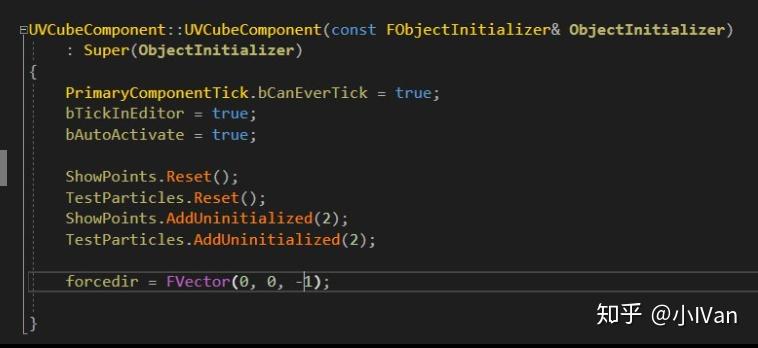
然后在Tick函数中每帧执行我们的函数

这里面这个ShowPoint是一个数组

为了让编辑器里能方便拿到我们质点的位置,这样我们就能用这个数组在蓝图脚本里drawdebugpoint了,来辅助我们观察,让我们能看到我们的质点。
在引擎里创建一个Actor,然后把我们写的这个组件加到Actor里,然后在tick函数里每帧以Shwopoints数组draw一个DebugSphere,那么你将会看到如下效果:
我们的第一个运动的球就出来啦!
完整代码如下:
h文件
#pragma once
#include "CoreMinimal.h"
#include "UObject/ObjectMacros.h"
#include "Components/MeshComponent.h"
#include "VCubeComponent.generated.h"
class UStaticMesh;
struct FVParticle
{
FVParticle():
OldPos(0,0,0),
CurPos(0,0,0)
{}
FVector OldPos;
FVector CurPos;
};
//This is a mesh effect component
UCLASS(hidecategories = (Object, LOD, Physics, Collision), editinlinenew, meta = (BlueprintSpawnableComponent), ClassGroup = Rendering, DisplayName = "VCubeComponent")
class VCUBE_API UVCubeComponent : public UMeshComponent
{
GENERATED_UCLASS_BODY()
public:
UPROPERTY(BlueprintReadWrite, EditDefaultsOnly, Category = VCubeComponent)
TArray<FVector> ShowPoints;
private:
//------------------------------------------------------//
TArray<FVParticle>TestParticles;
FVector forcedir;
void Velet()
{
const float SubstepTimeSqr = 0.1;
// Calc overall force
//const FVector ParticleForce = FVector(0, 0, -1);
for (int32 i = 0; i < TestParticles.Num(); i++)
{
// Find vel
const FVector Vel = TestParticles[i].CurPos - TestParticles[i].OldPos;
// Update position
const FVector NewPosition = TestParticles[i].CurPos + Vel + (SubstepTimeSqr * forcedir);
TestParticles[i].OldPos = TestParticles[i].CurPos;
TestParticles[i].CurPos = NewPosition;
}
}
void SolveConstrian()
{
for (int32 i = 0; i < TestParticles.Num(); i++)
{
FVector velocity = (TestParticles[i].CurPos - TestParticles[i].OldPos) / (TestParticles[i].CurPos - TestParticles[i].OldPos).Size();
if ((TestParticles[i].CurPos).Size() >= 800)
{
TestParticles[i].CurPos = TestParticles[i].OldPos;
}
}
}
};
cpp文件
#include "VCubeComponent.h"
//
UVCubeComponent::UVCubeComponent(const FObjectInitializer& ObjectInitializer)
: Super(ObjectInitializer)
{
PrimaryComponentTick.bCanEverTick = true;
bTickInEditor = true;
bAutoActivate = true;
ShowPoints.Reset();
TestParticles.Reset();
ShowPoints.AddUninitialized(2);
TestParticles.AddUninitialized(2);
forcedir = FVector(0, 0, -1);
}
void UVCubeComponent::OnRegister()
{
Super::OnRegister();
TestParticles[0].CurPos = GetOwner()->GetActorLocation();
TestParticles[1].CurPos = FVector(0, 0, 0);
MarkRenderDynamicDataDirty();
}
void UVCubeComponent::TickComponent(float DeltaTime, enum ELevelTick TickType, FActorComponentTickFunction *ThisTickFunction)
{
Super::TickComponent(DeltaTime, TickType, ThisTickFunction);
Velet();
SolveConstrian();
ShowPoints[0] = TestParticles[0].CurPos;
ShowPoints[1] = TestParticles[1].CurPos;
// Need to send new data to render thread
MarkRenderDynamicDataDirty();
UpdateComponentToWorld();
}
【3】棍子模拟
我们有了一个球以后,我们可以尝试再在TestParticles数组里加入第二个质点,然后蓝图里以这个质点再画一次DebugSphere。
我们现在只有了棍子的两端,这时候我们需要一个方式来让棍子的两端不碰在一起
然后在Tick函数中和注册函数中:

于是你就能看到下面的效果了:
【4】三角形稳定结构模拟
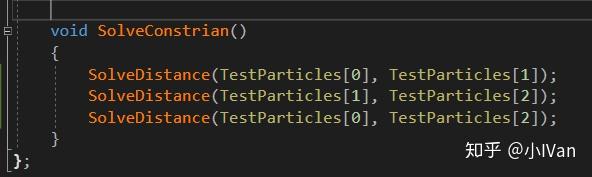
有了一根棍子,我们再加两根棍子,就是个闭合三角形
效果如下:
我们在constrain里指认一下就可以了
我们还可以加一个点模拟四面体
【5】约束
目前约束有以下几种方法
(1)棍子约束
(2)软棍子约束
软棍子约束就是,假设有A--B--C三个质点,我先对AB用棍子约束,在对AC用棍子约束多step一次
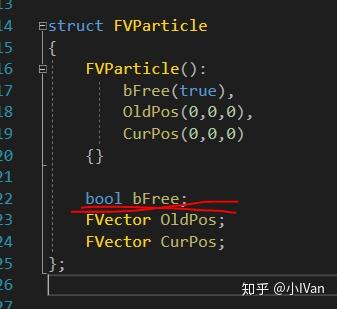
(3)钉子约束
就是让粒子不运动,给个bool判断一下是否bFree就可以了
(4)角度约束(群里一哥们儿的代码,他写了我就不想写了)
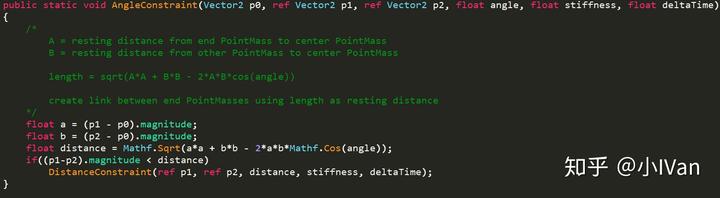
然后你就能做各种约束啦
【6】布料模拟
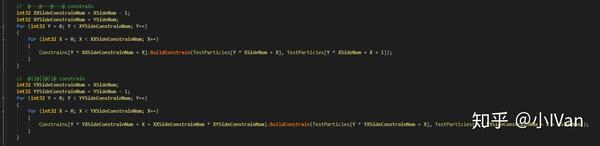
主要是约束的构建比较麻烦,需要质点构建横竖两个方向的约束,我的方法是先构建横着的,再构建竖着的。
然后我们就能做出布料啦!
【7】发散
以上还没有使用角度约束,我们还可以用韦尔来积分制作橡胶棒,弯曲树木的躯干等等效果。还可以制作软体。
布料demo核心代码:
粒子类型和约束类型部分:
struct FVParticle
{
FVParticle():
bFree(true),
OldPos(0,0,0),
CurPos(0,0,0)
{}
bool bFree;
FVector OldPos;
FVector CurPos;
};
struct FVConstrain
{
FVConstrain(){}
FVParticle* particleA;
FVParticle* particleB;
void BuildConstrain(FVParticle& A, FVParticle& B)
{
particleA = &A;
particleB = &B;
}
void SolveDistance()
{
if (particleA == nullptr || particleB == nullptr) return;
float DisierDistance = 49;
FVector Delta = particleB->CurPos - particleA->CurPos;
float CurrentDistance = Delta.Size();
float ErrorFactor = (CurrentDistance - DisierDistance) / CurrentDistance;
if (particleA->bFree && particleB->bFree)
{
particleA->CurPos += ErrorFactor * 0.5f * Delta;
particleB->CurPos -= ErrorFactor * 0.5f * Delta;
}
else if (particleA->bFree)
{
particleA->CurPos += ErrorFactor * Delta;
}
else if (particleB->bFree)
{
particleB->CurPos -= ErrorFactor * Delta;
}
//Simple collision
if ((particleA->CurPos).Size() >= 700)
{
particleA->CurPos = particleA->OldPos;
}
if ((particleB->CurPos).Size() >= 700)
{
particleB->CurPos = particleB->OldPos;
}
}
void DrawDebugConstrain(UWorld* world)
{
DrawDebugCylinder(world, particleA->CurPos, particleB->CurPos, 1.0, 6, FColor::Blue, false, -1, 0, 1.0);
}
};
组件头文件部分:
TArray<FVParticle>TestParticles;
TArray<FVConstrain>Constrains;
FVector forcedir;
void Velet()
{
const float SubstepTimeSqr = 0.1;
// Calc overall force
//const FVector ParticleForce = FVector(0, 0, -1);
for (int32 i = 0; i < TestParticles.Num(); i++)
{
if (TestParticles[i].bFree)
{
// Find vel
const FVector Vel = TestParticles[i].CurPos - TestParticles[i].OldPos;
// Update position
const FVector NewPosition = TestParticles[i].CurPos + Vel + (SubstepTimeSqr * forcedir);
TestParticles[i].OldPos = TestParticles[i].CurPos;
TestParticles[i].CurPos = NewPosition;
}
}
}
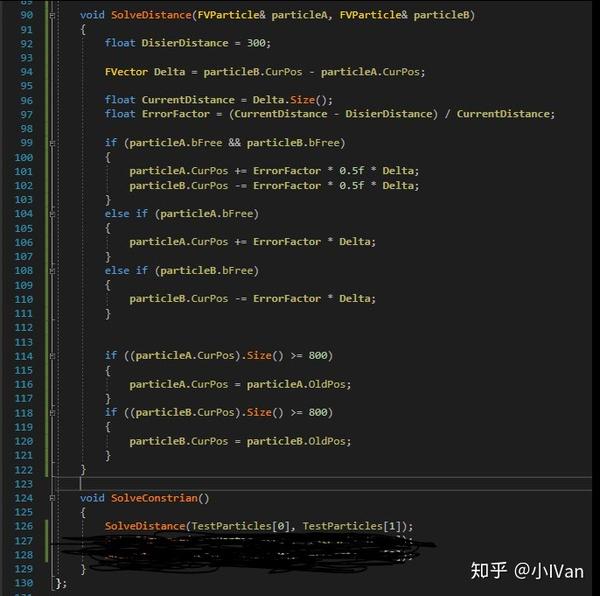
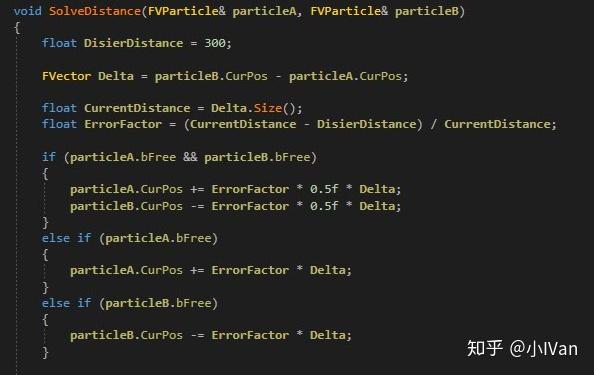
void SolveDistance(FVParticle& particleA, FVParticle& particleB)
{
float DisierDistance = 300;
FVector Delta = particleB.CurPos - particleA.CurPos;
float CurrentDistance = Delta.Size();
float ErrorFactor = (CurrentDistance - DisierDistance) / CurrentDistance;
if (particleA.bFree && particleB.bFree)
{
particleA.CurPos += ErrorFactor * 0.5f * Delta;
particleB.CurPos -= ErrorFactor * 0.5f * Delta;
}
else if (particleA.bFree)
{
particleA.CurPos += ErrorFactor * Delta;
}
else if (particleB.bFree)
{
particleB.CurPos -= ErrorFactor * Delta;
}
//Simple collision
if ((particleA.CurPos).Size() >= 800)
{
particleA.CurPos = particleA.OldPos;
}
if ((particleB.CurPos).Size() >= 800)
{
particleB.CurPos = particleB.OldPos;
}
}
void SolveConstrian()
{
for (int32 i = 0; i < Constrains.Num(); i++)
{
Constrains[i].SolveDistance();
}
}
组件cpp部分
UVCubeComponent::UVCubeComponent(const FObjectInitializer& ObjectInitializer)
: Super(ObjectInitializer)
{
PrimaryComponentTick.bCanEverTick = true;
bTickInEditor = true;
bAutoActivate = true;
forcedir = FVector(0, 0, -1);
}
void UVCubeComponent::OnRegister()
{
Super::OnRegister();
int32 XSideNum = 10;
int32 YSideNum = 10;
int32 TestParticleNum = XSideNum * YSideNum;
int32 ConstrainNum = (4 * TestParticleNum - 2 * XSideNum - 2 * YSideNum) * 0.5;
ShowPoints.Reset();
TestParticles.Reset();
Constrains.Reset();
ShowPoints.AddUninitialized(TestParticleNum);
TestParticles.AddUninitialized(TestParticleNum);
Constrains.AddUninitialized(ConstrainNum);
for (int32 Y = 0; Y < YSideNum; Y++)
{
for (int32 X = 0; X < XSideNum; X ++)
{
TestParticles[Y * XSideNum + X].CurPos = FVector(X * 50, Y * 50, 0);
if ((Y == 0 && X ==0) || (Y == 0 && X == XSideNum - 1))
{
//TestParticles[Y * XSideNum + X].bFree = false;
}
}
}
// @---@---@---@ constrain
int32 XXSideConstrainNum = XSideNum - 1;
int32 XYSideConstrainNum = YSideNum;
for (int32 Y = 0; Y < XYSideConstrainNum; Y++)
{
for (int32 X = 0; X < XXSideConstrainNum; X++)
{
Constrains[Y * XXSideConstrainNum + X].BuildConstrain(TestParticles[Y * XSideNum + X], TestParticles[Y * XSideNum + X + 1]);
}
}
// @||@||@||@ constrain
int32 YXSideConstrainNum = XSideNum;
int32 YYSideConstrainNum = YSideNum - 1;
for (int32 Y = 0; Y < YYSideConstrainNum; Y++)
{
for (int32 X = 0; X < YXSideConstrainNum; X++)
{
Constrains[Y * YXSideConstrainNum + X + XXSideConstrainNum * XYSideConstrainNum].BuildConstrain(TestParticles[Y * YXSideConstrainNum + X], TestParticles[Y * YXSideConstrainNum + X + XSideNum]);
}
}
MarkRenderDynamicDataDirty();
}
void UVCubeComponent::TickComponent(float DeltaTime, enum ELevelTick TickType, FActorComponentTickFunction *ThisTickFunction)
{
Super::TickComponent(DeltaTime, TickType, ThisTickFunction);
Velet();
SolveConstrian();
for (int32 i = 0; i < TestParticles.Num(); i++)
{
ShowPoints[i] = TestParticles[i].CurPos;
}
for (auto cons : Constrains)
{
cons.DrawDebugConstrain(GetOwner()->GetWorld());
}
// Need to send new data to render thread
MarkRenderDynamicDataDirty();
UpdateComponentToWorld();
}
我的环境模拟篇还有更深层次的运用
YivanLee:虚幻4渲染编程(环境模拟篇)【第五卷:可交互物理植被模拟 - 上】
Enjoy it !
最后展示一下我拿PhysicsX制作的物理吊桥:
















 704
704

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











