







SLAM学习 | 单目相机标定(附代码实测可用)
概要: 这篇文章介绍如何解决做SLAM过程中遇到的相机标定问题。关于针孔相机模型及其畸变的问题,高博在其《视觉SLAM十四讲》第五章中有详细的介绍。书中提到的相机内部参数包括内参矩阵和畸变系数,其中内参矩阵有4个待定参数,畸变分为径向畸变和切向畸变,径向畸变用k表示,一般用2-3个即可,切向畸变用p表示,一般用2个表示,相机标定的目的就是为了估计这些参数。本文使用张正友标定法进行相机标定,并进行相关实验。
关键字: 单目相机; 张正友标定法
1 针孔相机模型
针孔相机模型在《视觉SLAM十四讲》中有详细介绍,我在这里不打算再赘述,这里只介绍其中最关键的一张图:
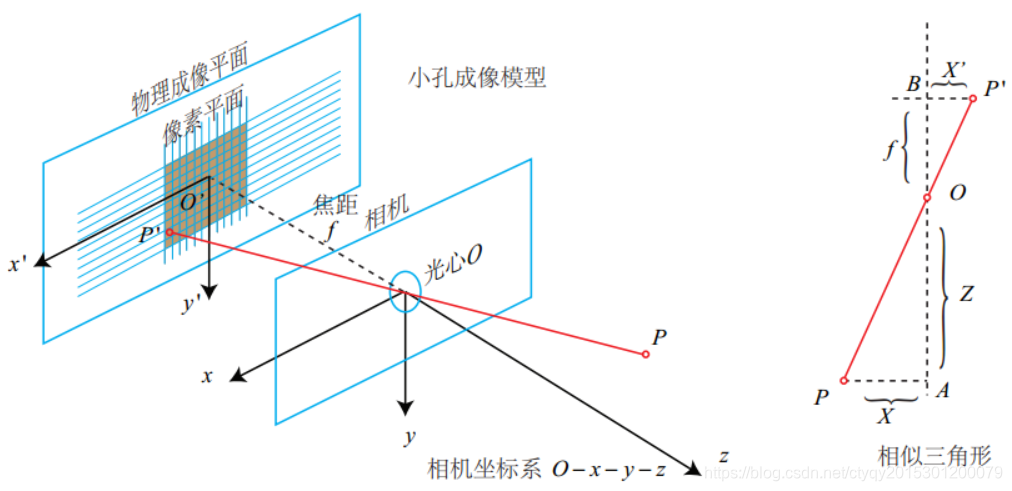
相机在成像过程中涉及四种坐标系,分别是:世界坐标系、相机坐标系、归一化成像平面坐标系和像素坐标系。这其中的相机坐标系和归一化成像平面坐标系的XYZ三轴方向已经在图1中给出,相机坐标系的三轴方向是:
X、Y、Z三轴分别指向相机右侧、下侧和沿着光轴指向正前方
尤其需要注意的是,ORB-SLAM2中的相机坐标也是按照图1给出的,相机校正过程中计算得到的内参矩阵也是在这一坐标系下得出的。
2 张正友标定法
在SLAM领域,绝大部分情况下都是用的张正友标定法来做相机标定。“张正友标定”是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法。文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
文章引用如下:
网上有很多实现张正友标定法的公开代码,这里选用其中用C++实现的一种,实测可以使用。记录如下:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
void main()
{
ifstream fin("calibration_MI9_image.txt"); /* 标定所用图像文件的路径 */
ofstream fout("calibration_MI9_result.txt"); /* 保存标定结果的文件 */
//读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
cout << "开始提取角点………………"<<endl;
int image_count = 0; /* 图像数量 */
Size image_size; /* 图像的尺寸 */
Size board_size = Size(4, 6); /* 标定板上每行、列的角点数 */ // 注意!这里得参数因图像而异
vector<Point2f> image_points_buf; /* 缓存每幅图像上检测到的角点 */
vector<vector<Point2f>> image_points_seq; /* 保存检测到的所有角点 */
string filename;
//int count = -1;//用于存储角点个数。
while (getline(fin, filename))
{
image_count++;
// 用于观察检验输出
cout << "image_count = " << image_count << ", and image_name = " << filename << endl;
/* 输出检验*/
//cout << "-->count = " << count << endl;
Mat imageInput = imread(filename);
if (image_count == 1) //读入第一张图片时获取图像宽高信息
{
image_size.width = imageInput.cols;
image_size.height = imageInput.rows;
cout << "image_size.width = " << image_size.width << endl;
cout << "image_size.height = " << image_size.height << endl;
}
/* 提取角点 */
if (0 == findChessboardCorners(imageInput, board_size, image_points_buf))
{
cout << "can not find chessboard corners!\n"; //找不到角点
exit(1);
}
else
{
Mat view_gray;
cvtColor(imageInput, view_gray, CV_RGB2GRAY);
/* 亚像素精确化 */
find4QuadCornerSubpix(view_gray, image_points_buf, Size(5, 5)); //对粗提取的角点进行精确化
image_points_seq.push_back(image_points_buf); //保存亚像素角点
/* 在图像上显示角点位置 */
drawChessboardCorners(view_gray, board_size, image_points_buf, true); //用于在图片中标记角点
imshow("Camera Calibration", view_gray);//显示图片
waitKey(500);//暂停0.5S
}
}
int total = image_points_seq.size();
cout << "total = " << total << endl;
int CornerNum = board_size.width*board_size.height; //每张图片上总的角点数
for (int ii = 0; ii<total; ii++)
{
if (0 == ii%CornerNum)// 24 是每幅图片的角点个数。此判断语句是为了输出 图片号,便于控制台观看
{
int i = -1;
i = ii / CornerNum;
int j = i + 1;
cout << "--> 第 " << j << "图片的数据 --> : " << endl;
}
if (0 == ii % 3) // 此判断语句,格式化输出,便于控制台查看
{
cout << endl;
}
else
{
cout.width(10);
}
//输出所有的角点
cout << " -->" << image_points_seq[ii][0].x;
cout << " -->" << image_points_seq[ii][0].y;
}
cout << "角点提取完成!\n";
//以下是摄像机标定
cout << "开始标定………………";
/*棋盘三维信息*/
Size square_size = Size(10, 10); /* 实际测量得到的标定板上每个棋盘格的大小 */
vector<vector<Point3f>> object_points; /* 保存标定板上角点的三维坐标 */
/*内外参数*/
Mat cameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 摄像机内参数矩阵 */
vector<int> point_counts; // 每幅图像中角点的数量
Mat distCoeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
vector<Mat> tvecsMat; /* 每幅图像的旋转向量 */
vector<Mat> rvecsMat; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
int i, j, t;
for (t = 0; t<image_count; t++)
{
vector<Point3f> tempPointSet;
for (i = 0; i<board_size.height; i++)
{
for (j = 0; j<board_size.width; j++)
{
Point3f realPoint;
/* 假设标定板放在世界坐标系中z=0的平面上 */
realPoint.x = i*square_size.width;
realPoint.y = j*square_size.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
object_points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,假定每幅图像中都可以看到完整的标定板 */
for (i = 0; i<image_count; i++)
{
point_counts.push_back(board_size.width*board_size.height);
}
/* 开始标定 */
calibrateCamera(object_points, image_points_seq, image_size, cameraMatrix, distCoeffs, rvecsMat, tvecsMat, 0);
cout << "标定完成!\n";
//对标定结果进行评价
cout << "开始评价标定结果………………\n";
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /* 保存重新计算得到的投影点 */
cout << "\t每幅图像的标定误差:\n";
fout << "每幅图像的标定误差:\n";
for (i = 0; i<image_count; i++)
{
vector<Point3f> tempPointSet = object_points[i];
/* 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 */
projectPoints(tempPointSet, rvecsMat[i], tvecsMat[i], cameraMatrix, distCoeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = image_points_seq[i];
Mat tempImagePointMat = Mat(1, tempImagePoint.size(), CV_32FC2);
Mat image_points2Mat = Mat(1, image_points2.size(), CV_32FC2);
for (int j = 0; j < tempImagePoint.size(); j++)
{
image_points2Mat.at<Vec2f>(0, j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at<Vec2f>(0, j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err /= point_counts[i];
std::cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
std::cout << "总体平均误差:" << total_err / image_count << "像素" << endl;
fout << "总体平均误差:" << total_err / image_count << "像素" << endl << endl;
std::cout << "评价完成!" << endl;
//保存定标结果
std::cout << "开始保存定标结果………………" << endl;
Mat rotation_matrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout << "相机内参数矩阵:" << endl;
fout << cameraMatrix << endl << endl;
fout << "畸变系数:\n";
fout << distCoeffs << endl << endl << endl;
for (int i = 0; i<image_count; i++)
{
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << tvecsMat[i] << endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(tvecsMat[i], rotation_matrix);
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << rotation_matrix << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << rvecsMat[i] << endl << endl;
}
std::cout << "完成保存" << endl;
fout << endl;
return;
}
注意,上述代码中一般来说有3处需要根据自己的情况修改:
1-main函数开头的一句话:
ifstream fin("calibration_MI9_image.txt"); /* 标定所用图像文件的路径 */<font>
中的calibration_MI9_image.txt是将拍摄黑白格得到的图像名按行排列在一个txt文件中,该文件名以及文件的内容都需要根据自己的实际内容修改。
2-main函数开头的一句话:
ofstream fout("calibration_MI9_result.txt"); /* 保存标定结果的文件 */
中的calibration_MI9_result.txt是相机校正的结果所存放在的一个txt文件中,该文件名需要根据自己的实际内容修改,文件内容由代码产生,无需用户处理。
3-main函数开头的一句话:
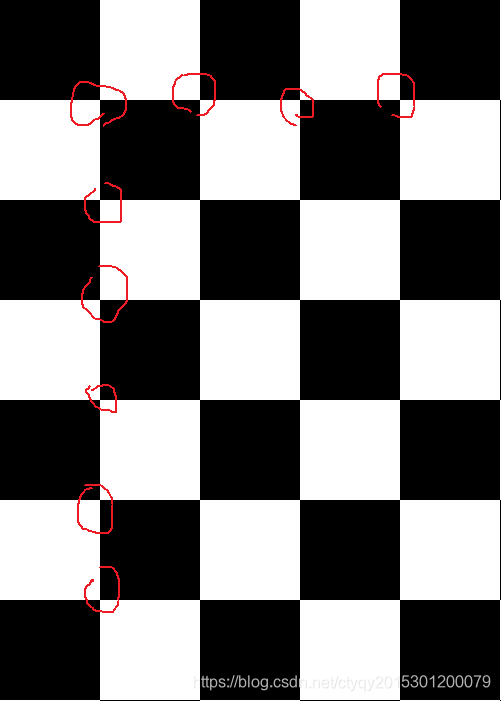
Size board_size = Size(4, 6); /* 标定板上每行、列的角点数 */ // 注意!这里得参数因图像而异
其中的4和6分别是打印的黑白格点图中横竖角点的数目。例如在图2中,横竖角点的数目分别是4和6(只有两块黑色方格对角分布构成的才算角点),因此图2中一共有24个角点:
3 VS2013下配置openCV
由于选用的相机标定代码是C++写的,因此选择在Windows系统下配置VS2013和openCV。关于Windows系统下配置VS2013和openCV的资料和博客网上非常多,就不再赘述了,这里就只记录几点我在配环境时踩过的坑。
1-在往系统中添加环境变量时记得把64位和32位的都添加进去;
2-在VS软件中需要配置的地方有:(1)属性-VC++目录-包含目录,(2)属性-VC++目录-库目录,(3)属性-链接器-输入-附加依赖项;
3-保险起见,在配置“属性-链接器-输入-附加依赖项”时,最好不要把debug版本的lib和release版本的lib同时添加进去,因为在大多数情况下我们只会用到debug版本。即使要添加,也应该将所有的debug版本的lib和release版本的lib分开写,千万不能一个XXX.lib,一个XXXd.lib交替着写(根据我的经验,交替写会报出莫名其妙的错误);
4-VS的版本和openCV中cv文件夹的版本是这样对应的:VS2010—vc10,VS2012—vc11,VS2013—vc12,不同的VS版本应该选用不同的vc文件夹;
5-其他……想起来再说。
4 标定过程与结果
首先,从不同角度拍摄黑白格点图,并依次命名,如图3所示:

然后,将这些图片的名字集中到一个txt文件中,如图4所示:
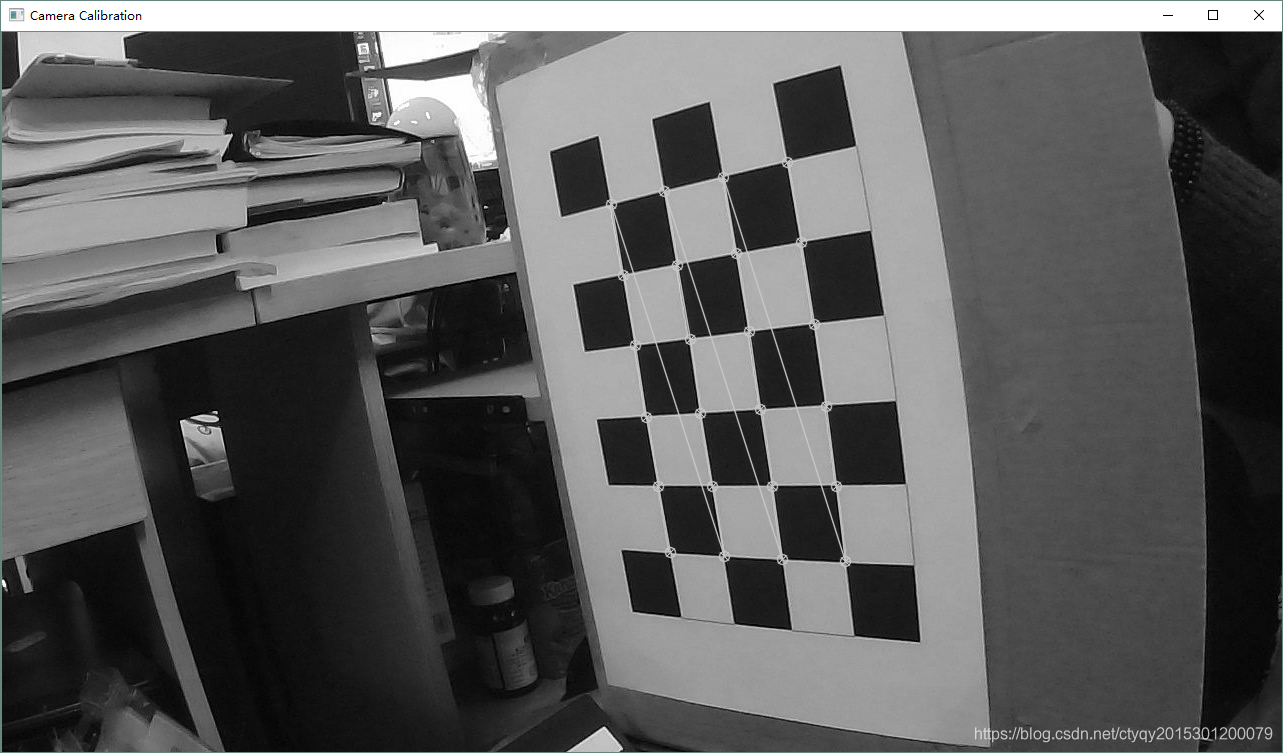
最后,就可以运行代码了。效果如图5和图6所示:
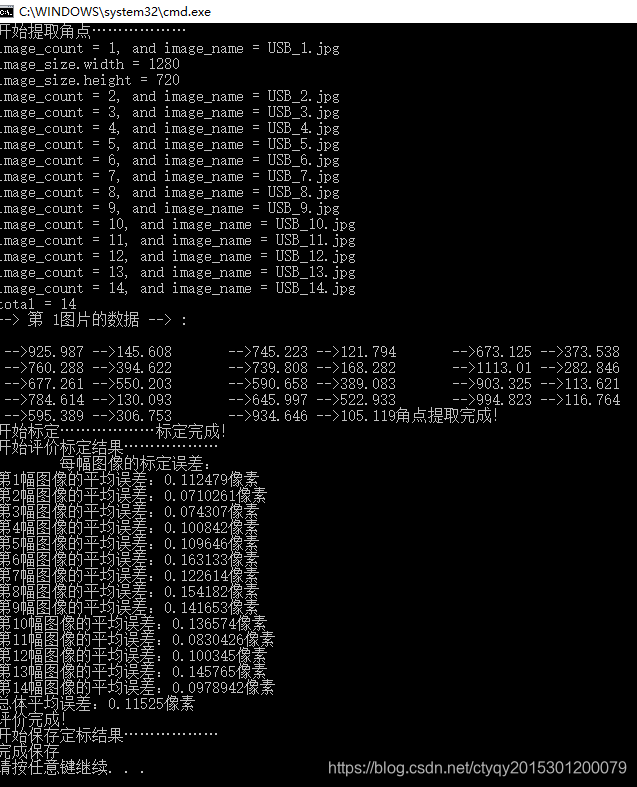
最终得到的结果可以在同路径下对应txt文件中查看,如图7所示:
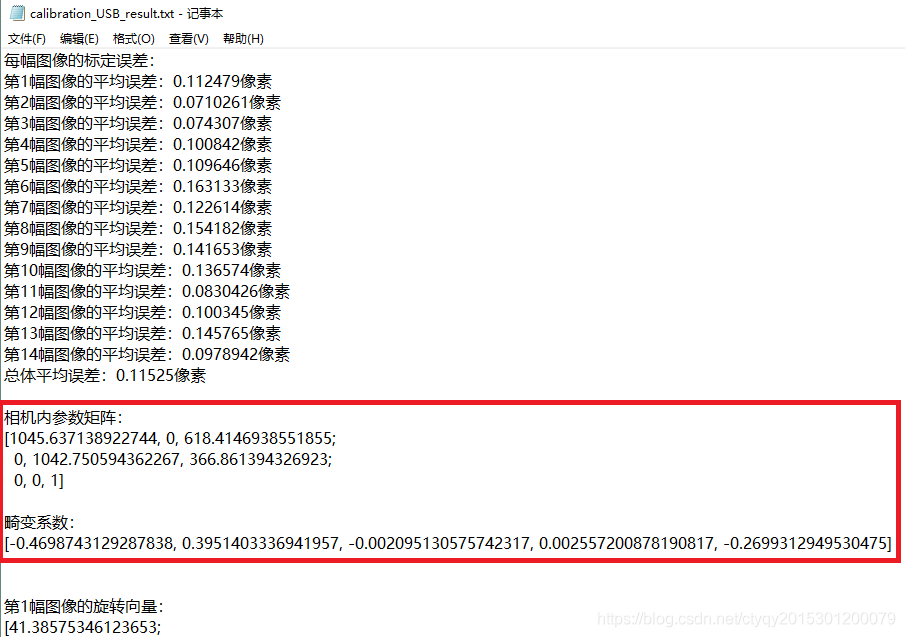
从图7中可以看出,张正友标定法不仅可以得到相机的内参,包括内参矩阵和畸变系数,也就是图中红色方框标记出来的部分;还可以得到相机的外参,包括旋转矩阵和旋转向量,也就是图7中txt文件没有完全显示出来的下文。
最后,得到相机的内参后,将其带入SLAM的配置文件,就可以进行后续的工作了。
5 经验总结与注意事项
相机标定的过程虽然简单(事实上确实很简单,别人把代码都给出来了),但是我也是踩了不少坑(事实上我经常踩坑,就相机标定这个事儿也是别人5分钟我要弄上个两天才好)。因此在这里把遇到的一些坑和解决方案记录下来。
1-VS2013下配置openCV时,一定要注意在配置“属性-链接器-输入-附加依赖项”时,debug版本的lib和release版本的lib不能交叉添加;
2-黑白格数量不要太多,形成4*6个交叉点是比较合适的;
3-确保打印机墨盒存量足够,不要打出来的黑色格子不够黑;往板子上贴的之后要平整;
4-拍摄时务必注意不要在格纸上有反光;
5-拍摄角度要不同,但是也别过于倾斜,会造成算法识别不出来。















 712
712











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









