







发那科六轴机械手码垛实例笔记
这次码垛的目标是一个6*3*1的测试工装板,利用一体式两段气缸,配合拧紧工具,对每个工位进行拧紧
-
如下图,刚开始程序肯定进行复位,等待位
-
检测原位传感器,然后置位一级气缸,使吸钉管到吸钉位,打开吸真空阀,检测压力传感器是否满足,如果有就保持,下一步到码垛程序
-
如下图,按F1指令,添加码垛指令,有4种类型
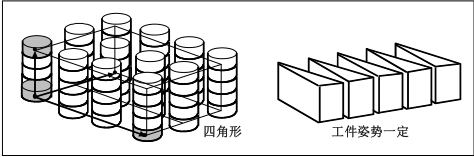
PALLETIZING B_i --对应所有工件的姿势一定,堆上时的底面(最底下的面)形状为直线(工件都在xyz一直线上),或底面为平行四边形的情形,堆积模式简单,路径模式一种
注解:路径模式指的是码垛时的接入点以及逃点的路径,设定时一般设定一个点,系统会自动计算其他点位的接入点及逃点,仅针对一种路径的情况
PALLETIZING BX_i -- B_i的升级版,都是针对堆积模式简单的码垛,但是这种提供多种路径模式多种
PALLETIZING E_i -- 堆积模式较为复杂,路径模式一种,工位没有在XYZ的一条直线上,当然也能兼容B的码垛功能,也能使用在堆积模式简单的情况
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2711
2711











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











