










专用集成电路 – 运算电路
@(知识点汇总)
1. 二进制加法器
二进制加法器接收加数A和B,以及进位Ci,输出和S,以及进位输出Co.
二进制加法器的真值表如下:
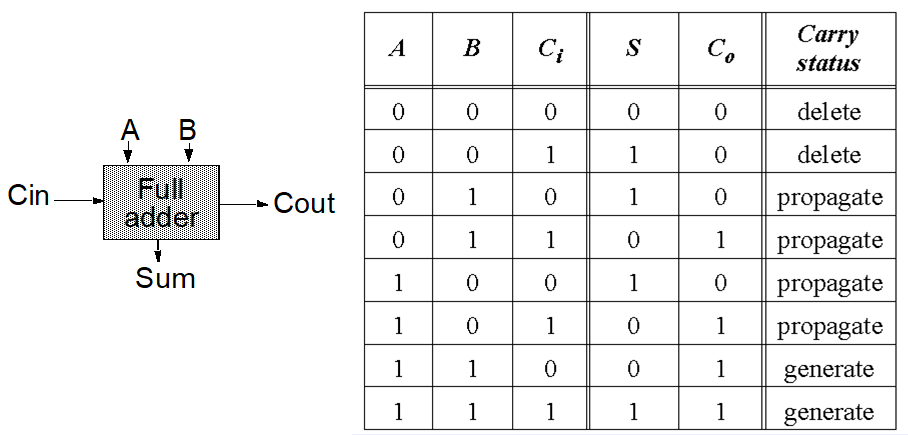
逻辑表达式:
S
=
A
⊕
B
⊕
C
i
S = A \oplus B \oplus C_i
S=A⊕B⊕Ci
C
o
=
A
B
+
B
C
i
+
A
C
i
C_o = AB+BC_i+AC_i
Co=AB+BCi+ACi
从实现的角度,可以将S和Co定义为一些中间信号:
- G = A B G=AB G=AB:进位产生(generate),为1时,保证 C o = 1 C_o=1 Co=1
- D = A ‾ ⋅ B ‾ D=\overline{A}\cdot \overline{B} D=A⋅B:进位取消(delet),为1时,保证 C o = 0 C_o=0 Co=0
- P = A ⊕ B P = A\oplus B P=A⊕B:进位传播(propagate),为1时,保证 C o = C i C_o=C_i Co=Ci
上面的几个变量均和Ci无关,可以将逻辑表达式写为这些值的函数:
C
o
(
G
,
P
)
=
G
+
P
C
i
C_o(G,P) = G + PC_i
Co(G,P)=G+PCi
S
(
G
,
P
)
=
P
⊕
C
i
S(G,P) = P\oplus C_i
S(G,P)=P⊕Ci
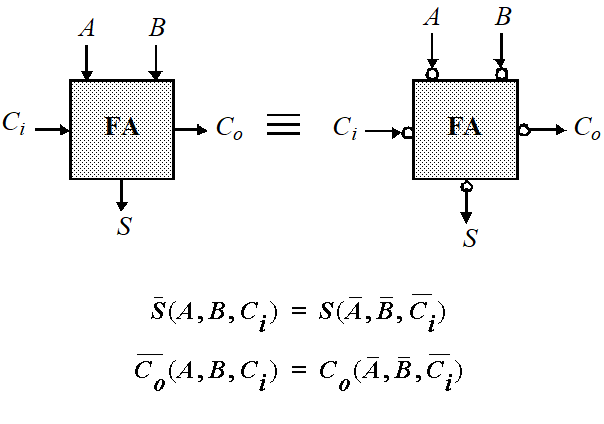
二进制全加器的一个特性是,输入反向的话,输出也反向,可以通过逻辑表达式观察得到:
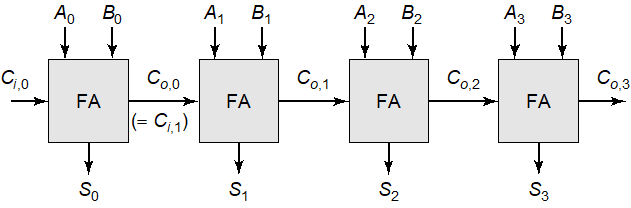
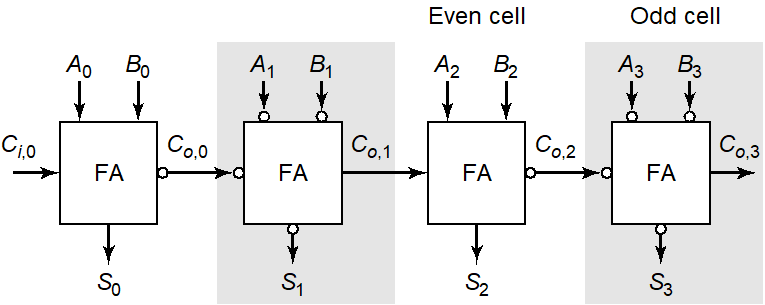
1.1 逐位进位加法器
也叫行波进位加法器。通过把N个二进制全加器(FA)串联起来得到。
1.2 静态CMOS加法器
如果直接用CMOS实现上面的二进制全加器,将会消耗36个管子,而实际上可以通过将逻辑表达式变形,来使得“和”与“进位产生”电路共享某些逻辑:
C
o
=
A
B
+
B
C
i
+
A
C
i
C_o = AB +BC_i+AC_i
Co=AB+BCi+ACi
S
=
A
B
C
i
+
C
o
‾
(
A
+
B
+
C
i
)
S = ABC_i+\overline{C_o}(A+B+C_i)
S=ABCi+Co(A+B+Ci)
从真值表很容易验证这与之前的式子等价。并且只需要28管:
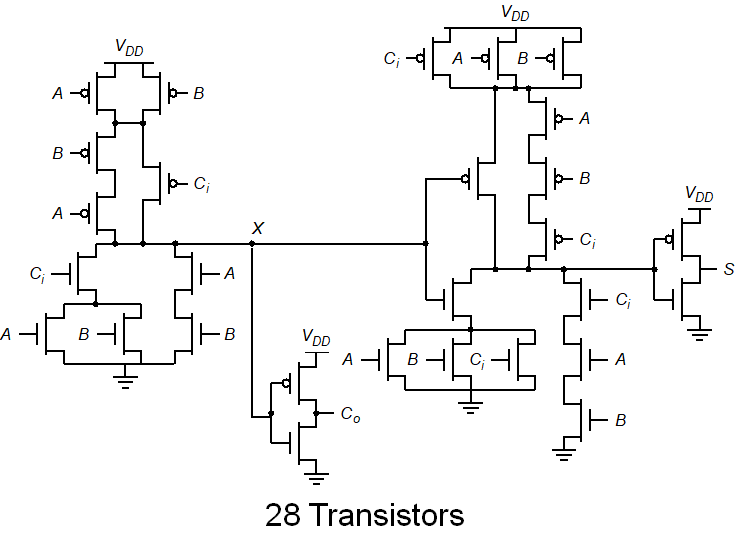
上面电路用到了一个小技巧,就是将Ci关键信号放在靠近输出端,可以避免内部节点充放电等待Ci信号的到来,改善输出的延时。
缺陷:
- 进位产生与和产生电路中堆叠了很多PMOS管
- Co信号的本征负载电容很大,包括两个扩散电容,6个栅极电容加上布线电容。
- 在进位产生电路中经过了两个反向级,如果进位链输出的负载很小,两级逻辑引起额外的延时。
- 和的产生要求一个额外的逻辑级
延时优化:
利用全加器的反向特性,输入反向输出也反向,可以在加法器链中引入输入反向的全加器:
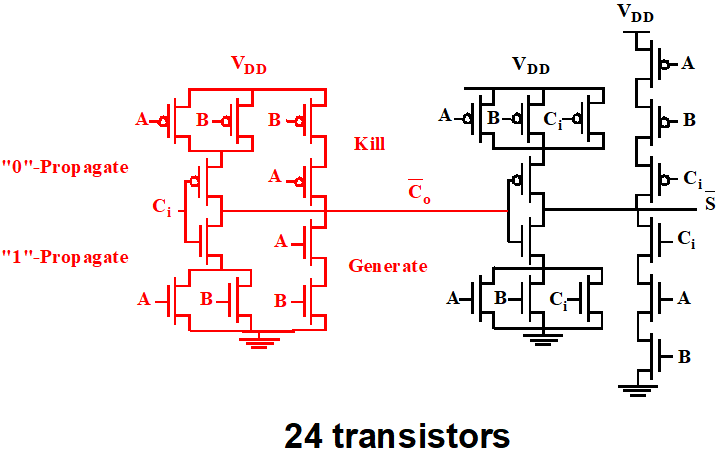
1.3 镜像加法器(mirror adder)
镜像加法器的特点:
- 基于G,D,P变量
- 取消了进位反向门
- PDN和PUN不再是对偶的CMOS结构,而是对称结构。
- 只消耗24个晶体管
- 只有在进位产生电路的管子需要优化尺寸改善速度,求和电路的晶体管都可以使用最小尺寸。关键点在于使 C o ‾ \overline{C_o} Co处电容最小。
G
=
A
B
G=AB
G=AB,
D
=
A
‾
⋅
B
‾
D=\overline{A}\cdot \overline{B}
D=A⋅B,$P = A\oplus B
(
与
(与
(与A+B$等价)
C
o
(
G
,
P
)
=
G
+
P
C
i
C_o(G,P) = G + PC_i
Co(G,P)=G+PCi,
S
=
A
B
C
i
+
C
o
‾
(
A
+
B
+
C
i
)
S = ABC_i+\overline{C_o}(A+B+C_i)
S=ABCi+Co(A+B+Ci)
可以分析一下镜像加法器的工作方式,实际上镜像加法器的进位电路巧妙利用了进位产生,消除和传播:
- 当A=B=1时,G=1,表示进位产生,此时通过PDN的两个串联NMOS可以将输出拉低,得到Co的反向信号,并且此时PUN不导通;
- 当A=B=0时,D=1,表示进位消除,此时通过PUN的两个串联PMOS可以将输出拉高,得到Co的反向信号;并且此时PDN不导通;
- 当A和B不全为1时,P=1,表示进位传播。PUN和PDN都部分导通(输入为A和B的PMOS和NMOS都有一个导通),上拉还是下拉取决于进位输入Ci,与公式中的 P C i PC_i PCi相匹配,并且输出Co的反向信号。
- 对于和电路也可以同样分析。
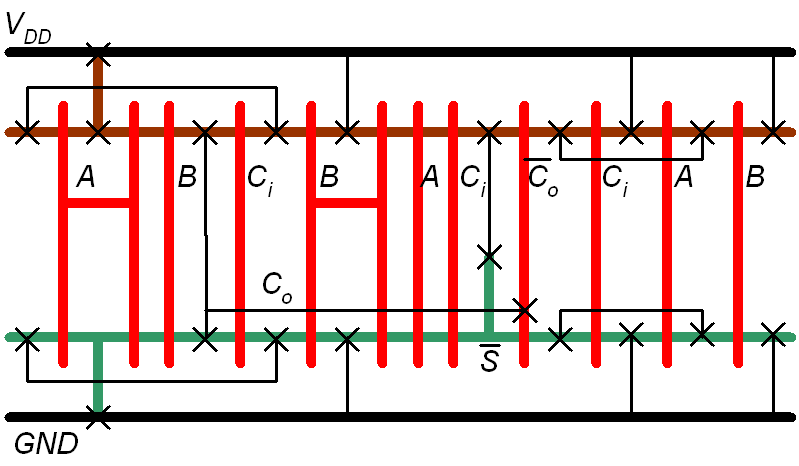
镜像加法器的版图:
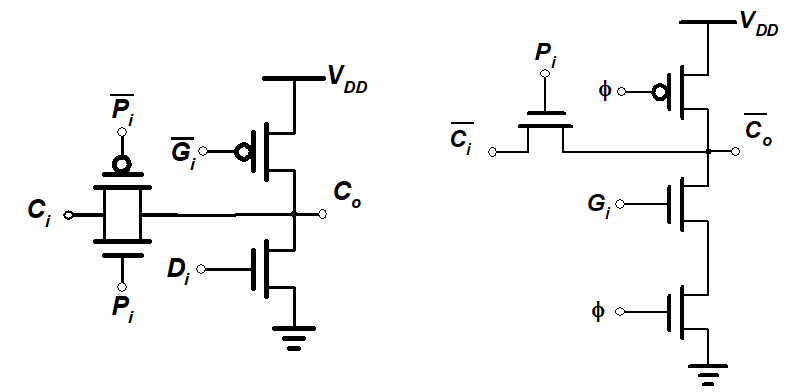
1.4 传输门型加法器
使用传输门来构建和与进位电路,特点是它的和与进位输出具有近似的延时。也是24管。
G
=
A
B
G=AB
G=AB,
D
=
A
‾
⋅
B
‾
D=\overline{A}\cdot \overline{B}
D=A⋅B,$P = A\oplus B
(
与
(与
(与A+B$等价)
C
o
(
G
,
P
)
=
G
+
P
C
i
C_o(G,P) = G + PC_i
Co(G,P)=G+PCi,
S
(
G
,
P
)
=
P
⊕
C
i
S(G,P) = P\oplus C_i
S(G,P)=P⊕Ci
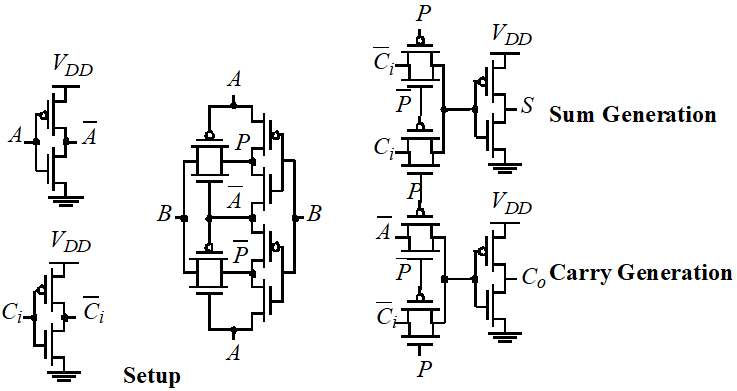
需要注意的是,在Co的产生电路中,用到了一个变换:
C
o
=
P
‾
⋅
A
‾
+
P
⋅
C
i
‾
‾
=
P
C
i
+
A
C
i
+
A
P
‾
=
P
C
i
+
A
⋅
A
⊙
B
=
P
C
i
+
A
B
C_o=\overline{\overline{P} \cdot \overline{A} + P\cdot \overline{C_i}} = PC_i+AC_i+A\overline{P}=PC_i+A\cdot A\odot B = PC_i+AB
Co=P⋅A+P⋅Ci=PCi+ACi+AP=PCi+A⋅A⊙B=PCi+AB
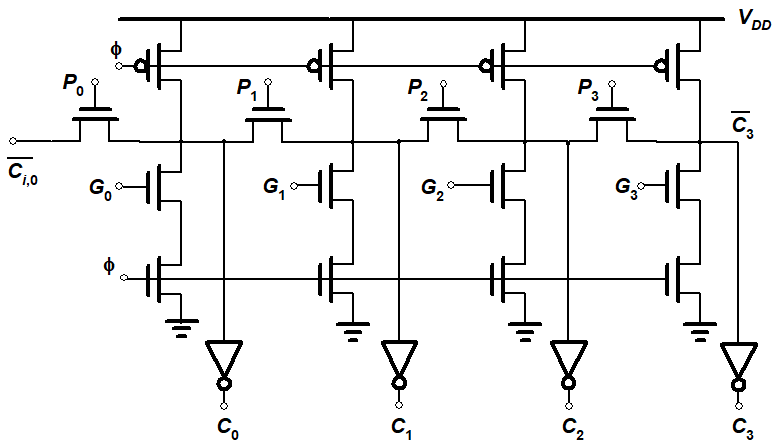
1.5 曼彻斯特进位链加法器
在传输门加法器中,进位电路可以进行优化,比如可以使用进位消除和产生信号来控制进位电路(下左图):
此外,使用动态逻辑可以更加简化,传输门也只需要使用单管,并且不需要进位取消电路。如上面右图。在预充电( ϕ = 0 \phi=0 ϕ=0)时,输出节点充到VDD,表示Co=0;求值时,根据G和Ci信号决定有无进位产生。下图是曼彻斯特进位链的构造:
上图中加法器进位链在最坏情况下的延时模型可模拟为线性RC网络。其延时为:
t
p
=
0.69
∑
i
=
1
N
C
i
(
∑
j
=
1
i
R
j
)
=
0.69
N
(
N
+
1
)
2
R
C
t_p = 0.69\sum_{i=1}^N C_i(\sum_{j=1}^iR_j) = 0.69\frac{N(N+1)}{2}RC
tp=0.69i=1∑NCi(j=1∑iRj)=0.692N(N+1)RC
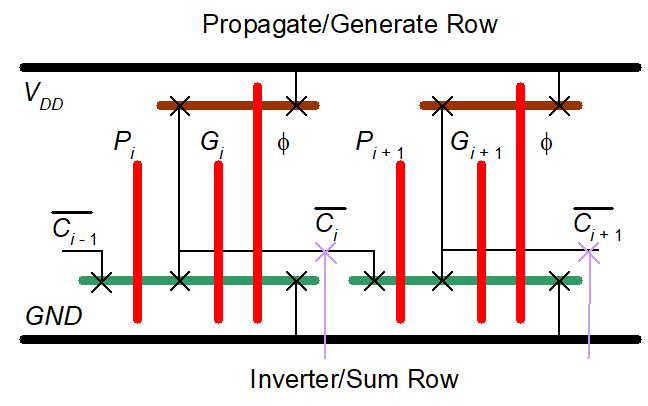
版图:
1.6 进位旁路加法器(Carry-Bypass Adder)
旁路进位加法器又叫进位跳跃加法器(carry-skip adder) :
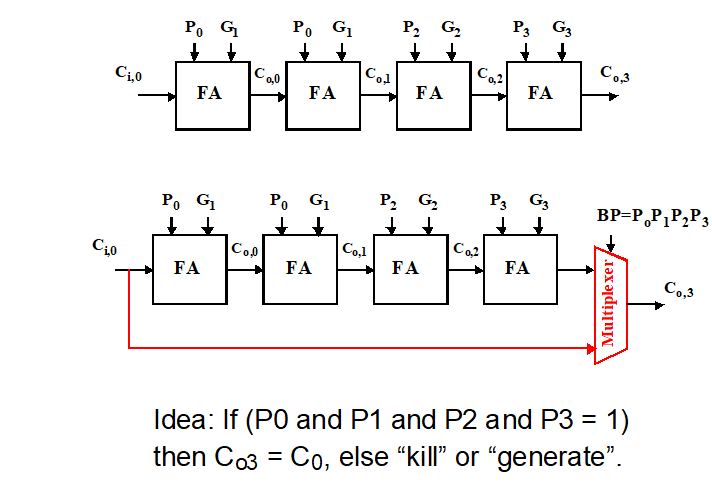
基本思路是增加一条进位旁路,通过进位选择信号 B P = P 0 P 1 … P n BP=P_0P_1\dots P_n BP=P0P1…Pn信号来选择进位输出是否直接选择最底层的进位进行输出。进而加快加法器。
曼彻斯特进位链实现的旁路加法器:
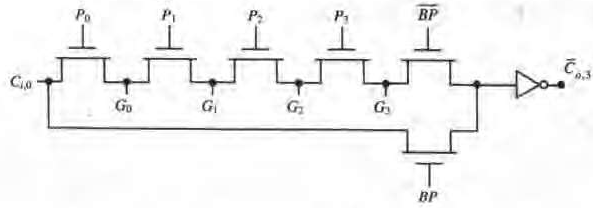
从上图中可以发现,当BP为高时,直接输出进位输入,而BP不为高时,则输出由中间的某些G信号决定,与Ci无关。这一性质可以极大加速加法器链,因为若干个这样的模块串联在一起时,实际上各个模块的进位电路中直到选择器之前的部分都可以并行地执行,而无需等待上级进位信号。
下面来计算旁路加法器的传播延时。首先对于N级的旁路进位加法器,假设其被划分为(N/M)个等长的旁路,每个旁路含有M位:
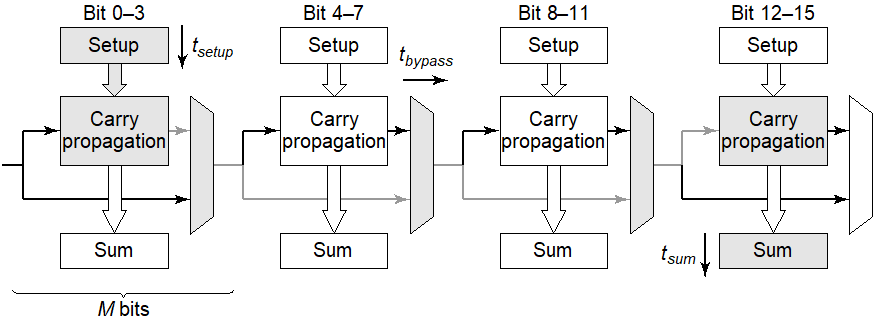
上图中灰色部分为关键路径。其延时可以表示为:
t
p
=
t
s
e
t
u
p
+
M
t
c
a
r
r
y
+
(
N
M
−
1
)
t
b
y
p
a
s
s
+
(
M
−
1
)
t
c
a
r
r
y
+
t
s
u
m
t_p = t_{setup} + Mt_{carry}+(\frac{N}{M}-1)t_{bypass}+(M-1)t_{carry}+t_{sum}
tp=tsetup+Mtcarry+(MN−1)tbypass+(M−1)tcarry+tsum
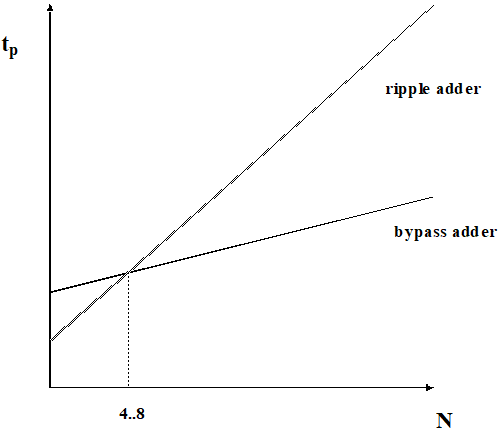
可以看到,虽然旁路加法器的延时仍然关于N呈线性关系,但斜率除以了一个M,但是多了几个常数项,所以反映到下图的延时和级数N的关系曲线中就会发现,当N比较大时旁路加法器优于逐位进位,但N比较小(4-8)时,反而比逐位进位差。
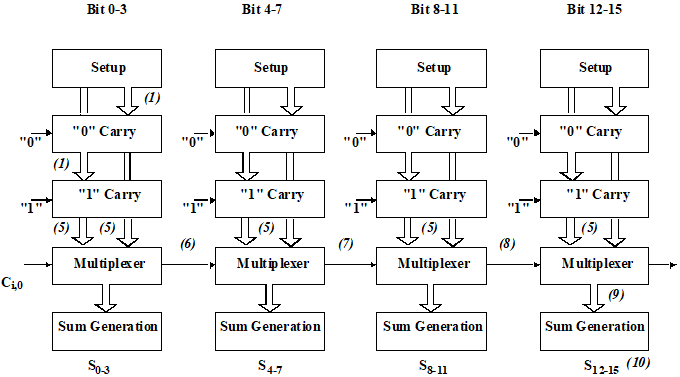
1.7 线性进位选择加法器(Linera Cary-Select Adder)
线性进位选择加法器其实跟上面的旁路加法器类似,但是旁路加法器可以工作的一个条件是进位链中要使用G信号或者D信号来保证不选择旁路时加法器链的输出也跟输入进位Ci无关。因此旁路加法器需要额外的BP信号(每级P相与)配合进位产生信号G来控制进位链。
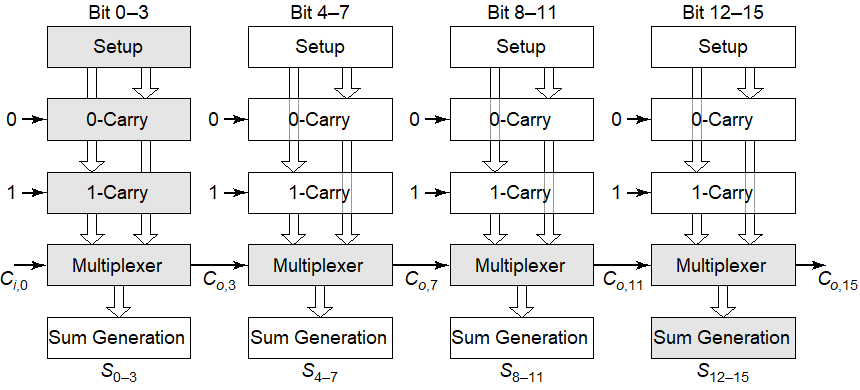
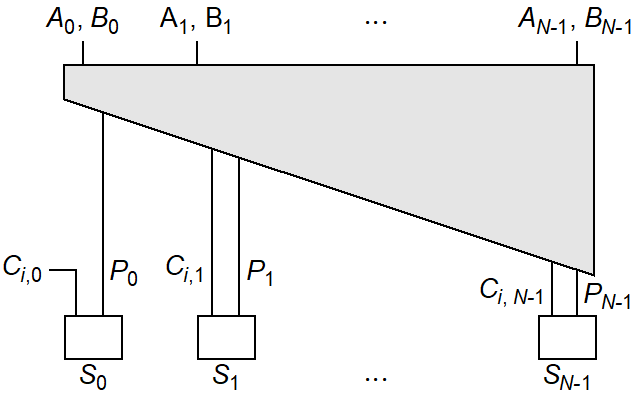
另外一种方法是使用线性进位选择加法器,其工作更加简单粗暴,为了使得加法器链的进位输出跟输入解耦,直接考虑进位输入的两种可能值,提前计算两种可能结果,等到输入进位到来直接根据进位值选择哪条路径输出即可,这意味着同时实现了0和1进位输入的两个进位路径:
付出的代价是一个额外的进位路径和一个多路开关,大概等于逐位进位结构的30%。
可以推导进位选择加法器的传播延时为:
t
p
=
t
s
e
t
u
p
+
M
t
c
a
r
r
y
+
(
N
M
)
t
m
u
x
+
t
s
u
m
t_p = t_{setup}+Mt_{carry}+(\frac{N}{M})t_{mux}+t_{sum}
tp=tsetup+Mtcarry+(MN)tmux+tsum
可见其传播延时仍然关于N呈线性关系。
1.8 平方根进位选择加法器(Square-Root Carry-Select Adder)
在上面的线性选择加法器中,每级分配相同的全加器,因此每级的延时都相同,每级进位链的结果在上一级的多路开关信号到来前已经稳定下来,可见在后面的几级在时刻5已经完成,但每级等待的时间越来越长,如图:
如果能够使后级不需要等待前一级多路开关的信号,而是在刚求完本级就正好接受到前级信号,就能消除这个等待时间:
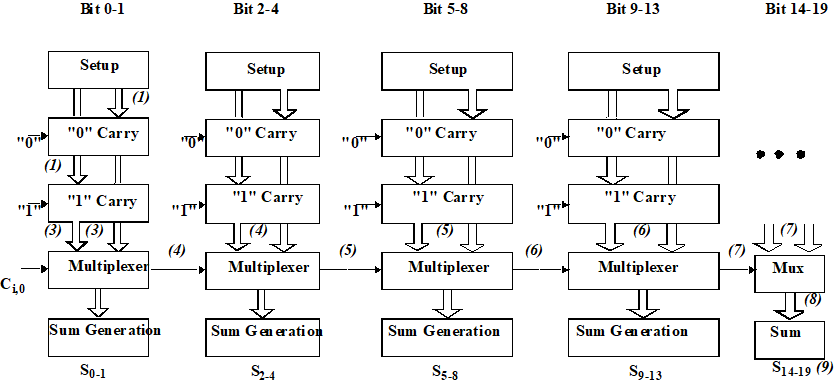
上图就是平方根进位选择加法器,其与线性选择加法器的区别只在于每级的位数逐级递增。通过这种方式,每级在计算完本级的进位结果的同时上一级的多路开关信号正好到来。
假设总共含有
P
P
P级,第一级为
M
M
M位。则有
N
=
M
+
(
M
+
1
)
+
(
M
+
2
)
+
⋯
+
(
M
+
P
−
1
)
=
p
2
2
+
P
(
M
−
1
2
)
N = M + (M+1)+(M+2)+\dots+(M+P-1)=\frac{p^2}{2}+P(M-\frac{1}{2})
N=M+(M+1)+(M+2)+⋯+(M+P−1)=2p2+P(M−21)
如果
M
<
<
N
,
如
M
=
2
,
N
=
64
M<<N,如M=2,N=64
M<<N,如M=2,N=64,则第一项起主要作用,则有
N
=
P
2
2
,
P
=
2
N
N = \frac{P^2}{2}, P=\sqrt{2N}
N=2P2,P=2N
因此其传播延时可写为:
t
p
=
t
s
e
t
u
p
+
M
t
c
a
r
r
y
+
(
2
N
)
t
m
u
x
+
t
s
u
m
t_p = t_{setup}+Mt_{carry}+(\sqrt{2N})t_{mux}+t_{sum}
tp=tsetup+Mtcarry+(2N)tmux+tsum
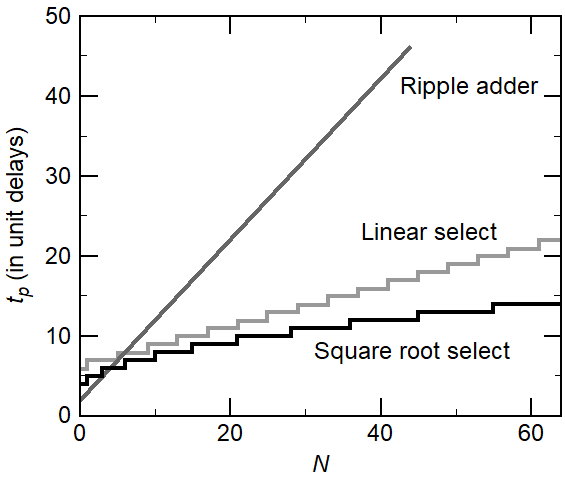
从公式可以看到,由于此处的M是初级的位数,一般都比线性选择加法器的小,延时并且跟根号2N呈线性关系,所以反应到延时和级数曲线中,平方根进位选择加法器跟纵轴交点要小于线性选择,且当N比较大时斜率远小于线性选择加法器:
1.9 超前进位加法器(Carry-lookahead Adder)
a. 单一超前进位加法器
上面的选择和旁路加法器虽然能减少延时,但逐级进位效应仍然存在。超前进位加法器解决了这一问题。
其基本思想是:
N位加法器的每一位上都有下面的关系:
C
o
,
k
=
f
(
A
k
,
B
k
,
C
o
,
k
−
1
)
=
G
k
+
P
k
C
o
,
k
−
1
C_{o,k}=f(A_k,B_k,C_{o,k-1})=G_k+P_kC_{o,k-1}
Co,k=f(Ak,Bk,Co,k−1)=Gk+PkCo,k−1
通过展开
C
o
,
k
−
1
C_{o,k-1}
Co,k−1,一直展开到第一级可以彻底消除每级进位的前一级的依赖,代价是实现加法器的逻辑逐级增加:
下面是一个四级超前进位加法的实现,利用了对偶性(类似镜像加法器):
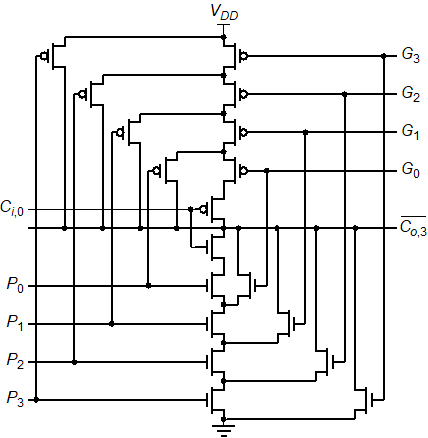
局限:
单一超前进位加法器只在N比较小(<5)时使用,实际上的延时还是随位数线性增加的,这主要由下面的因素决定:
- 大的扇入使得在N较大时极慢
- 如果用较为简单的门实现,则需要多个逻辑层次,也会增加延时
- 某些信号的扇出常常过度增加,使得加法器更慢,例如G0和P0信号出现在后面的每级中,导致线电容较大
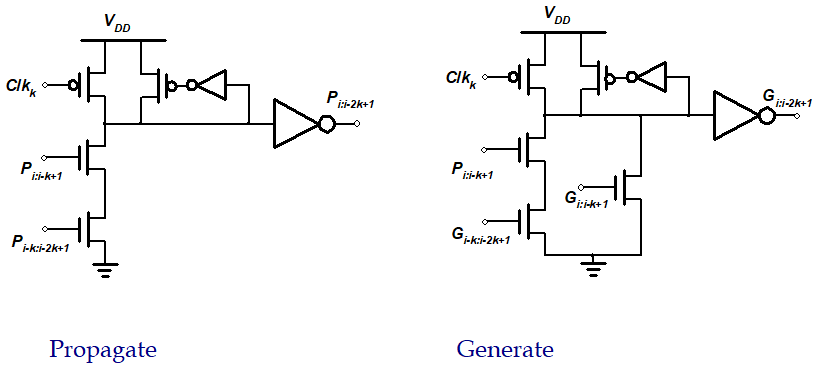
b. 对数超前进位加法器
将进位传播和进位产生组织成递归的树状结构:
在上面的公式中,进位传播被分解成两位的子组合
G
i
:
j
,
P
i
:
j
G_{i:j},P_{i:j}
Gi:j,Pi:j.称之为块进位产生和块进位传播信号。
引入一个新的布尔运算,称之为点操作
(
⋅
)
(\cdot)
(⋅):
(
G
,
P
)
⋅
(
G
′
,
P
′
)
=
(
G
+
P
G
′
,
P
P
′
)
(G,P)\cdot (G',P')=(G+PG',PP')
(G,P)⋅(G′,P′)=(G+PG′,PP′)
利用这个操作可以分解
(
G
i
:
j
,
P
i
:
j
)
=
(
G
i
:
k
,
P
i
:
k
)
⋅
(
G
k
−
1
:
j
,
P
k
−
1
:
j
)
(G_{i:j},P_{i:j})=(G_{i:k},P_{i:k})\cdot (G_{k-1:j},P_{k-1:j})
(Gi:j,Pi:j)=(Gi:k,Pi:k)⋅(Gk−1:j,Pk−1:j),点操作服从结合律,不服从交换律。
利用点操作的结合律,可以构成一个树结构来计算所有
2
i
−
1
2^i-1
2i−1个位置上的进位,并且只需要
l
o
g
2
(
N
)
log_2(N)
log2(N)就可计算出来。因此对数加法器可以将传播延时降低到
l
o
g
2
(
N
)
log_2(N)
log2(N)。
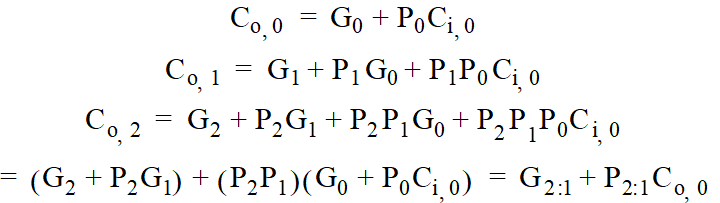
下面是基于点操作的基2 kogge-Stone草签仅为对数加法器原理图。
其中白色小方格表示建立P和G信号,黑点表示点操作,菱形表示和产生。
对于N=16的情形,整个加法器需要49个逻辑门。
1.10 动态逻辑实现加法器
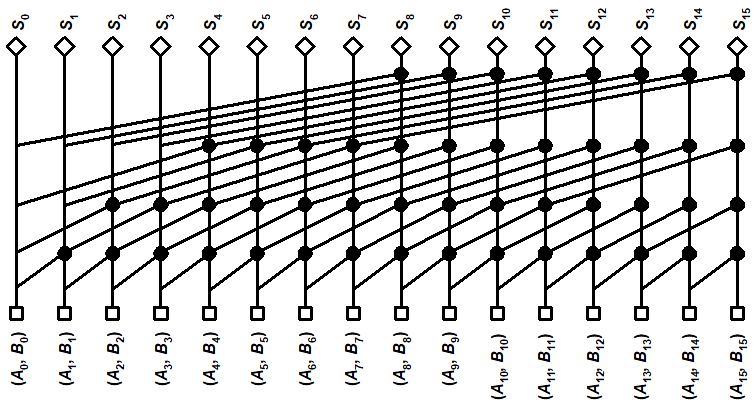
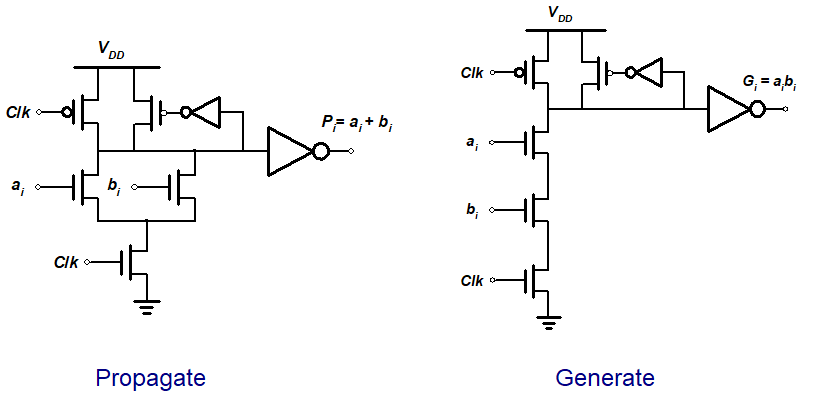
下面是用动态多米诺逻辑实现的加法器进位产生和传播信号电路。
以及多米诺逻辑实现的点操作电路:
还需要配套的求和电路:
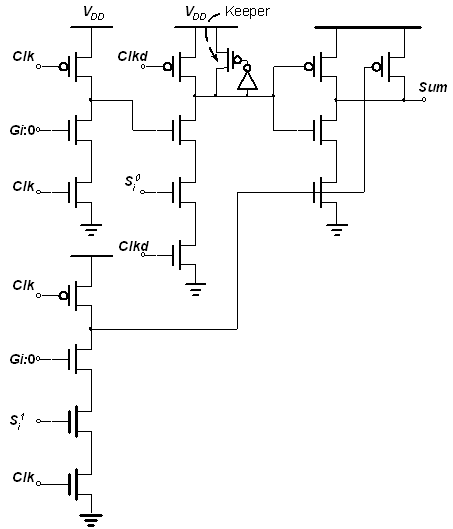
其中 S i 0 = a i ⊕ b i ‾ S_i^0=\overline{a_i\oplus b_i} Si0=ai⊕bi, S i 1 = a i ⊕ b i S_i^1=a_i\oplus b_i Si1=ai⊕bi.上图中的保持器是重要的,因为前面两级多米诺逻辑违反了多米诺的设计规则:两个动态门串联在一起而没有在中间插入反相器。如果用同一个时钟求值,则会第二个门的输出可能会有毛刺。
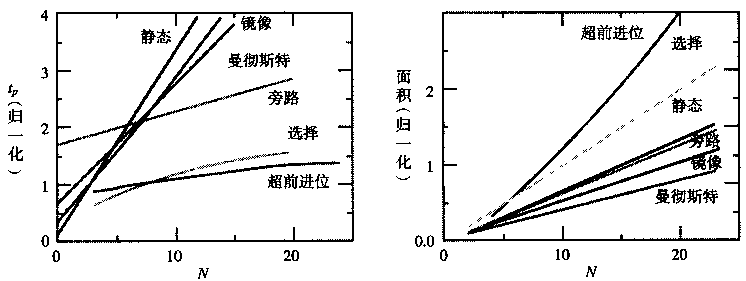
1.10 总结
各类加法器传播延时和面积与级数的关系图:
2. 乘法器
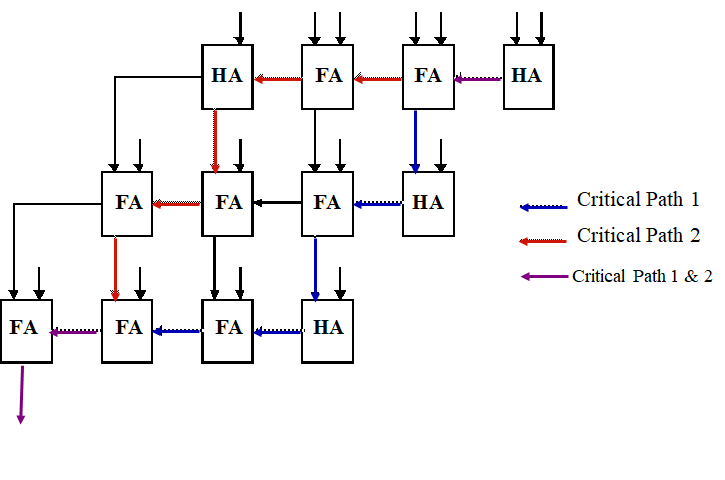
2.1 阵列乘法器
实现乘法的比较常用的方法是类似与手工计算乘法的方式:
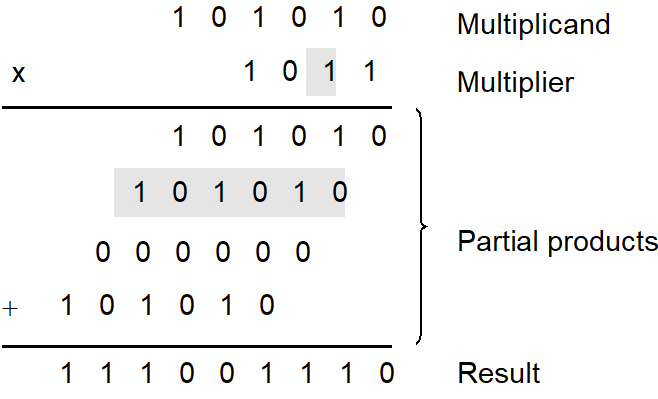
对应的硬件结构就是阵列乘法器(array multiplier)它有三个功能:产生部分积,累加部分积和最终相加。
阵列乘法器的关键路径为(下图标出了两条可能的关键路径):
假设乘数为
N
N
N,被乘数为
M
M
M。则上面的乘法器产生
N
N
N个部分积,乘法位数为
M
M
M,则需要
N
×
M
N\times M
N×M个二输入AND门以及
N
−
1
N-1
N−1个
M
M
M位加法器。
可以得到关键路径延时为:
t
m
u
l
t
=
[
(
M
−
1
)
+
(
N
−
2
)
]
t
c
a
r
r
y
+
(
N
−
1
)
t
s
u
m
+
t
a
n
d
t_{mult} = [(M-1)+(N-2)]t_{carry}+(N-1)t_{sum}+t_{and}
tmult=[(M−1)+(N−2)]tcarry+(N−1)tsum+tand
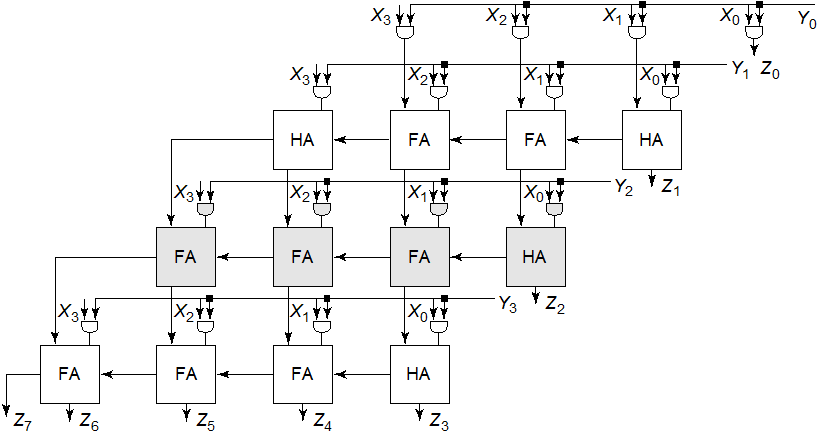
2.2 进位保留乘法器
背景:由于阵列乘法器中有许多几乎一样的关键路径,因此通过调整晶体管的尺寸来提高性能效果有限。
解决:进位输出可以沿着对角线传播而不是向左传递,这样传播并不改变结果,只需要加入额外的一排加法器(向量合并加法器vector-merging)来产生最终的结果。这样的乘法器叫做进位保留乘法器:
可见,相比于阵列乘法器,进位保留乘法器增加了部分面积,但关键路径唯一确定。
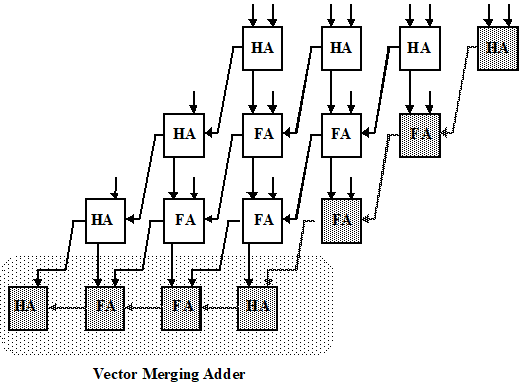
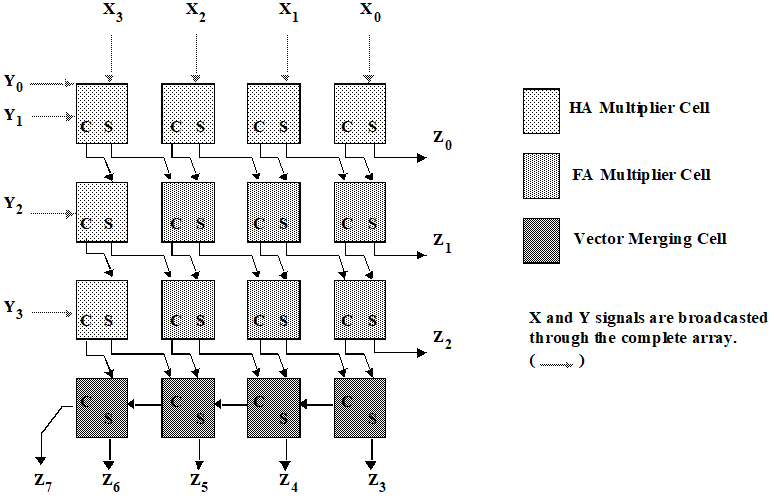
下图是进位保留加法器的布图(floorplan)结构。其规整的结构适合自动化生成。
2.3 树形乘法器
部分积的求和加法器可以安排为树形以减少关键路径和减少加法器。其中两个点的是半加器,三个点的是全加器。其压缩过程可以分为下面几步:
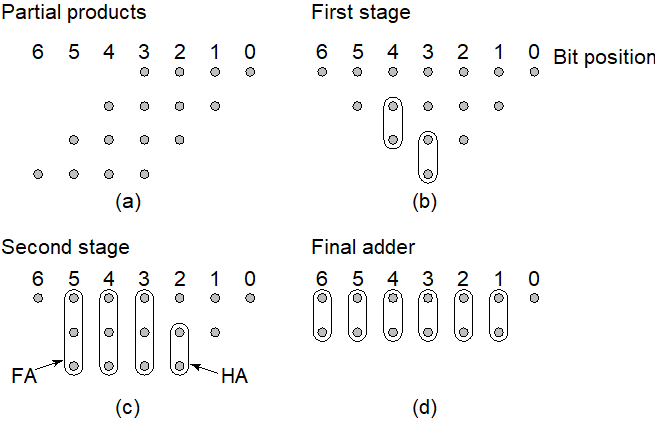
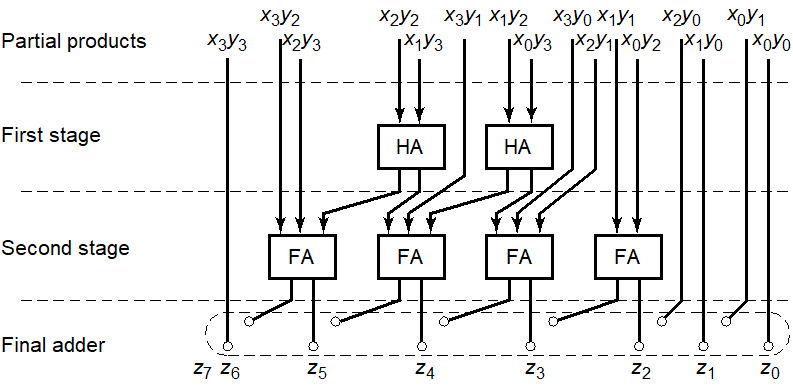
可见,前面的两部只需要三个半加器和三个全加器,最后一步是简单的加法器链。只比较前面部分的话,进位保留加法器的前面部分需要6个全加器和6个半加器!
优点:除了节省乘法器需要的硬件,Wallace树形乘法器也可以减少传播延时,其延时
O
(
l
o
g
1.5
(
N
)
)
O(log_{1.5}(N))
O(log1.5(N))。
缺点: 非常不规则,版图设计复杂。
2.4 Booth乘法器
在下面详细说明了Booth乘法器原理:
https://www.cnblogs.com/lyc-seu/p/12842399.html
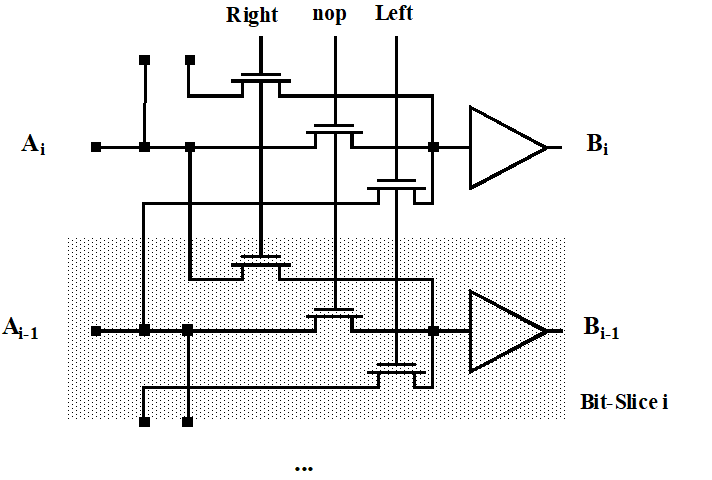
3. 移位器
3.1 一位可控移位器
其实是一个复杂的多路开关电路,根据不同控制信号,将输入左移或右移或不变。
多位的移位可以简单串联这样的单元实现,但移位位数多时,该方法过于复杂,不实用并且速度很慢。
3.2 桶形移位器
由晶体管阵列构成,行数等于数据字长,列数等于最大移位宽度。
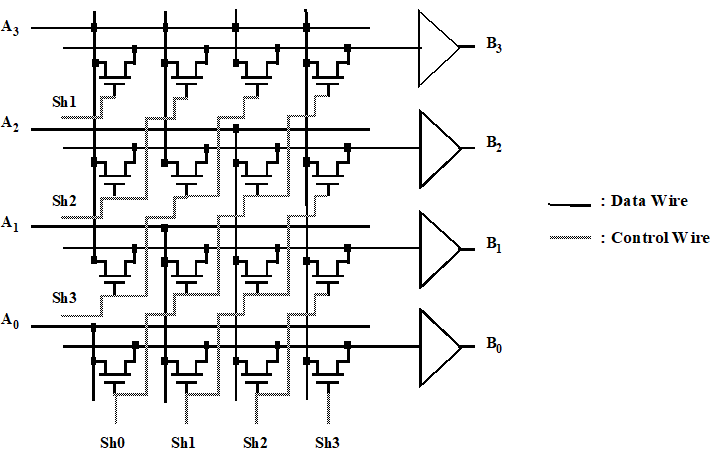
特点:
- Sh0Sh3**只能有一位是高电平**,分别控制A右移0位3位
- 自动支持符号位扩展
- 信号最多只需要通过一个传输门,也就是说传播延时理论上是常数,与位数和规模无关(实际上因为缓冲器输入电容会随着移位宽度线性增加,所以延时不会是常数)
- 版图尺寸不由晶体管决定,而是通过布线数目或者所金属线的间距决定。
- 适用于移位数较小的移位器。
3.3 对数移位器
桶形移位器实现为传输管的单个阵列,而对数移位器采用分级的方法。移位值分解为几个2的指数值。
- 对数移位器的速度取决于移位宽度,一个M为的移位器需要 l o g 2 M log_2M log2M级,
- 适用于较大的移位值,在速度和面积上都更有效,且容易参数化。
版图:
















 690
690











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











