目标跟踪算法——KCF 进阶
最新推荐文章于 2024-08-13 15:18:46 发布








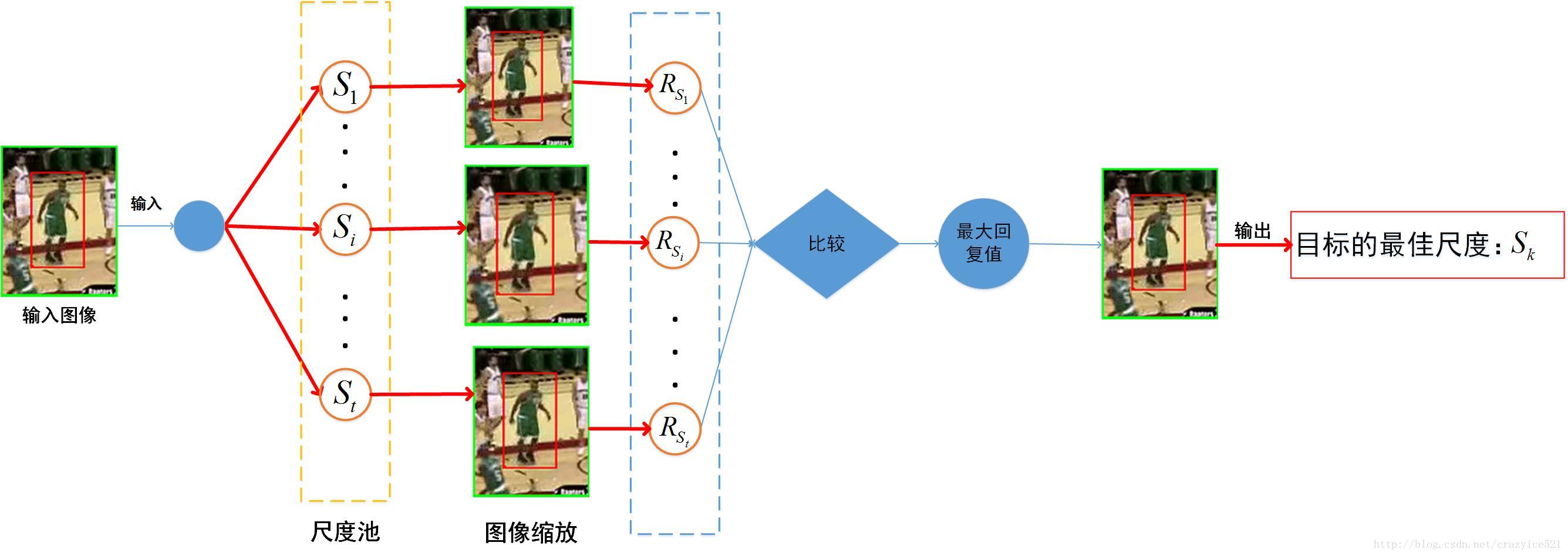
 本文详细介绍了KCF跟踪算法的弊端,包括目标尺度变化和遮挡问题,并提出了相应的解决方法,如尺度池技术和分块跟踪策略,通过经典论文和相关资源为读者提供了深入理解与实践的指导。
本文详细介绍了KCF跟踪算法的弊端,包括目标尺度变化和遮挡问题,并提出了相应的解决方法,如尺度池技术和分块跟踪策略,通过经典论文和相关资源为读者提供了深入理解与实践的指导。
本文详细介绍了KCF跟踪算法的弊端,包括目标尺度变化和遮挡问题,并提出了相应的解决方法,如尺度池技术和分块跟踪策略,通过经典论文和相关资源为读者提供了深入理解与实践的指导。
本文详细介绍了KCF跟踪算法的弊端,包括目标尺度变化和遮挡问题,并提出了相应的解决方法,如尺度池技术和分块跟踪策略,通过经典论文和相关资源为读者提供了深入理解与实践的指导。
 6848
656
6848
656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















