




 本文介绍了英飞凌TC3xx处理器中LocalMemoryUnit(LMU)的内存保护机制,特别是MasterTagID的使用以及如何通过寄存器配置实现对SRAM区域的权限控制。
本文介绍了英飞凌TC3xx处理器中LocalMemoryUnit(LMU)的内存保护机制,特别是MasterTagID的使用以及如何通过寄存器配置实现对SRAM区域的权限控制。
目录
1.基本概述
在英飞凌TC3xx中,每个CPU除了有自己的DLMU外,在SRI总线还挂着几块SRAM,这几块SRAM由LMU(Local Memory Unit)进行权限控制。
RAM的具体地址(上述9H用于cached访问,Bh用于非cached访问):

LMU除了本身硬件机制(如ecc)外,还提供了16个对SRAM区域的保护功能,这个机制主要是通过Master Tag ID的识别来限制对目标SRAM权限的访问。
要实现对RAM区域的保护,每个区域需要由6个寄存器定义,分别对应受保护SRAM区域的上下限、针对Mastr Tag ID的读权限(2个寄存器)、针对Mastr Tag ID的写权限(2个寄存器)。
与CPU的MPU相似,当定义的两块区域有交叉时, 是根据最高权限来进行分配的;
区域A:CPU0读写权限
区域B:CPU0只读权限
A\B交叉的区域:CPU0读写权限
2.理解Master Tag ID
与Tricore的MPU不一样,LMU的memory保护是通过Master Tag ID来区分的,那么什么叫Master Tag ID。 根据TC3xx User Mannul章节4.10.7 ,在整个系统外设总线(SPB)或者SRI总线上,所有的Master接口都分配到了一个独立的ID,以便软件调试或者MCDS的时候辨别是哪个外设或者CPU执行了当前事务。以下图为例
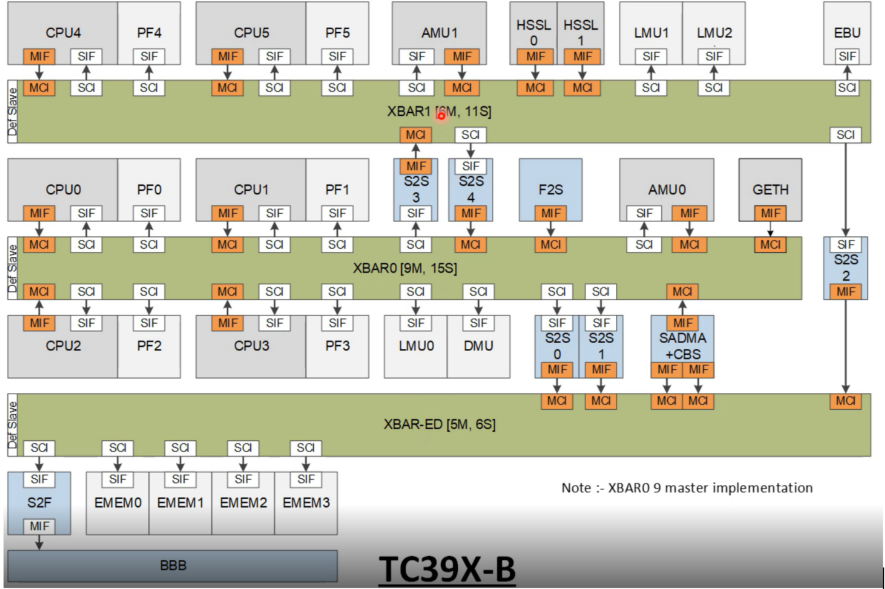
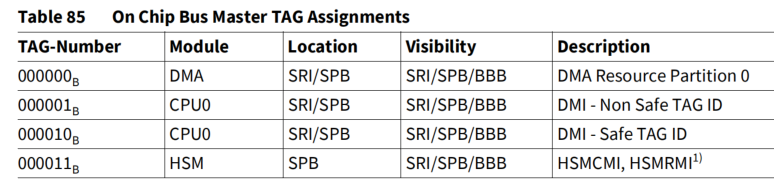
如果CPU0想要访问LMU0中的资源,就需要CPU0使用MIF通过MCI发送请求给LMU0,那么不同的MIF就通过Tag ID来进行分辨。 如表格所示:
- SRI:Shared Resource Interconnect
- SPB:System Peripheral Bus
- BBB:Back Bone Bus
- DMI:Data memory interface
我们今天暂时先不管上面CPU0两个不同DMI对应的Tag ID为何不同,主要关注LMU的memory 保护机制。
3.LMU memory保护使能
有了Master Tag ID,那么接下里我们要看如何开始配置寄存器实现内存保护功能。
一个区域保护有如下6个寄存器:
- RGNLAx(x=0-15):定义受保护区域的下限
- RGNUAx(x=0-15):定义受保护区域的上限
- RGNACCENWAx(x=0-15):定义受保护区域的master(id= 0-31)的写访问
- RGNACCENWBx(x=0-15):定义受保护区域的master(id = 32-63)的写访问
- RGNACCENRAx(x=0-15):定义受保护区域的master(id= 0-31)的读访问
- RGNACCENRBx(x=0-15):定义受保护区域的master(id = 32-63)的读访问
4.小结
本章将LMU使能、master tag ID做了一个介绍,下一章将继续讲解使能和测试。



















 724
724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











