







更新:2025.3.17,补充了关节轨迹规划部分(点到点五次多项式插值)
一、机械臂轨迹规划概述
机械臂的运动规划包括路径规划和轨迹规划两个方面。
1.路径规划:
定义:路径规划是指在给定的起点和终点之间,寻找一条无碰撞的路径。路径可以是直线、曲线或者其他形状,主要关注的是路径的几何形状。
目标:避障、路径尽可能短、平滑
常用方法:直线插补、圆弧插补、B样条、多项式插值、RRT、基于图搜索的方法、人工势场法等
2.轨迹规划
定义:轨迹规划是在路径规划的基础上,为路径赋予时间信息,包括速度、加速度等,是的机械臂能够按照预定的时间和运动特性完成运动
目标:时间优化、能量优化、运动平滑、动态约束
常用方法:笛卡尔轨迹规划(对末端执行器位姿有严格要求的场合)、关节空间轨迹规划(对关节运动由严格要求的场合)
关节空间轨迹规划:将关节变量表示成时间的函数,并规划它的一阶和二阶导数。
二、插补与拟合
1.直线插补
1)本质上就是在起始位置和目标位置之间生成一段直线轨迹。
2)其求解思路如下:
确定起始位置==》确定单位步长(dx,dy,dz),也就是(终点坐标-起点坐标)/(插值点个数-1)==》确定插值点坐标,其计算公式如下

def linear_interpolation_3d(start_point, end_point, num_points):
"""
生成从start_point到end_point的三维直线插补点。
参数:
start_point (tuple): 起始点坐标,格式为(x, y, z)。
end_point (tuple): 终止点坐标,格式为(x, y, z)。
num_points (int): 要生成的插补点数量,包括起始点和终止点。
返回:
list: 包含插补点坐标的列表。
"""
points = []
x_start, y_start, z_start = start_point
x_end, y_end, z_end = end_point
# 计算x、y和z方向上的增量
dx = (x_end - x_start) / (num_points - 1)
dy = (y_end - y_start) / (num_points - 1)
dz = (z_end - z_start) / (num_points - 1)
# 生成插补点, 这里的dx,dy,dz就是单位步长,也就是每个插补点之间的间距是恒定的
for i in range(num_points):
x = x_start + i * dx
y = y_start + i * dy
z = z_start + i * dz
points.append((x, y, z))
return points
# 使用示例
start_point = (0, 0, 0) # 起始点坐标
end_point = (10, 10, 10) # 终止点坐标
num_points = 5 # 生成5个插补点,包括起始点和终止点
interpolated_points = linear_interpolation_3d(start_point, end_point, num_points)
print(interpolated_points)2.圆弧插补
1)圆弧插补可以用于生成起点和终点之间的一段圆弧路径。
2)其求解思路如下:
给定起点、终点、圆心坐标==》计算起点与终点间对应圆弧的夹角,其计算公式如下:
 ==》计算单位步长(角度)
==》计算单位步长(角度)![]() ==》计算插值点位置
==》计算插值点位置
import numpy as np
def circular_interpolation_3d_with_z(start_point, end_point, center_point, num_points):
"""
生成从start_point到end_point的三维圆弧插补点,同时考虑Z坐标的线性变化。
参数:
start_point (tuple): 起始点坐标,格式为(x, y, z)。
end_point (tuple): 终止点坐标,格式为(x, y, z)。
center_point (tuple): 圆心点坐标,格式为(x, y, z)。
num_points (int): 要生成的插补点数量,包括起始点和终止点。
返回:
list: 包含插补点坐标的列表。
"""
points = []
x_start, y_start, z_start = start_point
x_end, y_end, z_end = end_point
x_center, y_center, z_center = center_point
# 计算从圆心到起点和终点的向量
vector_start = np.array([x_start - x_center, y_start - y_center])
vector_end = np.array([x_end - x_center, y_end - y_center])
# 计算圆弧的角度
angle = np.arccos(np.dot(vector_start, vector_end) / (np.linalg.norm(vector_start) * np.linalg.norm(vector_end)))
# 计算插补点的步长
angle_step = angle / (num_points - 1)
# 生成插补点,Z采用直线插补,x,y采用圆弧插补
for i in range(num_points):
t = i * angle_step
point = (center_point[0] + np.cos(t) * np.linalg.norm(vector_start),
center_point[1] + np.sin(t) * np.linalg.norm(vector_start),
z_start + i * (z_end - z_start) / (num_points - 1))
points.append(point)
return points
# 使用示例
start_point = (0, 0, 0) # 起始点坐标
end_point = (10, 0, 5) # 终止点坐标
center_point = (5, 0, 2.5) # 圆心点坐标
num_points = 100 # 生成100个插补点,包括起始点和终止点
interpolated_points = circular_interpolation_3d_with_z(start_point, end_point, center_point, num_points)
# 输出插补点
for point in interpolated_points:
print(point)3. Bezier曲线
学习参考资料:贝塞尔(Bezier)曲线与B样条_哔哩哔哩_bilibili
1)贝塞尔曲线是通过一组控制点来定义曲线的形状,这些控制点不仅决定了曲线的起点和终点,还影响曲线的弯曲程度和方向。假设一共有n+1个控制点,就可以确定n次的贝塞尔曲线:
 (公式1)
(公式1)
这个式子解开后就是:

其中W表示基,P为控制点坐标
![]()
计算W的代码如下:
W = comb(n, i) * (t ** i) * ((1 - t) ** (n - i)) # 形状会与t的一致2)下面这个图共有3个点,可以确定一个2次的贝塞尔曲线,图中可以看出![]() ,t属于[0,1], 用贝塞尔曲线公式(1)表达就是:
,t属于[0,1], 用贝塞尔曲线公式(1)表达就是:
![]()


以下分别是1次,2次,3次,4次贝塞尔曲线,从图中可以看出贝塞尔曲线的递推关系
![]()

3)具体形成Bezier曲线的代码
import numpy as np
import matplotlib.pyplot as plt
from scipy.special import comb
def bezier_curve(points, num_points=100):
"""
计算任意阶数的贝塞尔曲线。
:param points: 控制点列表,格式为 [(x1, y1), (x2, y2), ..., (xn, yn)]
:param num_points: 要生成的曲线点的数量
:return: 一个包含曲线点的数组
"""
n = len(points) - 1 # 贝塞尔曲线的阶数
t = np.linspace(0, 1, num_points) # 参数t从0到1,等间距
curve_points = np.zeros((num_points, 2)) # 初始化曲线点数组
# 遍历每个控制点,计算贝塞尔曲线的每个点
for i in range(len(points)):
# 计算基函数,comb(n,i)表示的是C(N,I),这个bernstein参数对应的是基函数
W = comb(n, i) * (t ** i) * ((1 - t) ** (n - i)) # 形状会与t的一致
curve_points[:, 0] += W * points[i][0] # x坐标
curve_points[:, 1] += W * points[i][1] # y坐标
return curve_points # 返回值为bezier曲线上的点
# 示例:定义一组控制点(可以是任意阶数)
# control_points = [(0, 0), (1, 3), (3, -1), (4, 2), (5, 4)] # 4阶贝塞尔曲线
control_points = [(0, 0), (1, 3), (3, -1), (4, 2), (5, 4), (6, 7)] # 5阶贝塞尔曲线
# 计算贝塞尔曲线
curve_points = bezier_curve(control_points, num_points=100)
# 绘制贝塞尔曲线
plt.figure(figsize=(6, 6))
plt.plot(curve_points[:, 0], curve_points[:, 1], label="Bezier Curve", color="blue")
# 绘制控制点和控制多边形
control_x, control_y = zip(*control_points)
plt.plot(control_x, control_y, "o--", label="Control Points", color="red")
# 添加图例和标题
plt.legend()
plt.title("General Bezier Curve")
plt.xlabel("X")
plt.ylabel("Y")
plt.grid(True)
plt.axis("equal")
plt.show()
4.B样条曲线
学习参考资料:贝塞尔(Bezier)曲线与B样条_哔哩哔哩_bilibili
8.5.2 B样条曲线定义(1)_哔哩哔哩_bilibili
1)和Bezier样条一样,B样条也是通过逼近一组控制点来产生的。但是B样条具有两个Bezier样条所不具备的特点:B样条多项式的次数可独立于控制点数目(有一定限制);B样条允许局部控制曲线或曲面。
2)B样条的相关概念:
控制点:通过控制点可以控制曲线形状,假设有n+1个控制点P0,P1,。。。Pn
节点:认为将目标曲线分为若干个部分,比如m+1个节点t0,t1,...tm,它们可以将曲线划分为m段
次:对于k阶,就是k-1次多项式
3)k次B样条曲线计算方法
B样条曲线的数学表达式如下:

4)B样条曲线基函数的定义:
一般采用de Boor-Cox递推定义B样条基函数:即对于k阶(k-1次)B样条,构造一种递推公式,结构如下:

==>定义空间
我做了一个结构图,可以对其结构做一个说明:k阶的基函数可以由两个k-1阶的基函数组成,一个k-1阶的基函数又可以由两个k-2阶的基函数组成,依此类推。这个结构图可以说明如果要确定第i个k阶B样条基函数,需要用到ui,ui+1,.....,ui+k个节点,区间【ui,ui+k】为该基函数的支承区间(只有支承区间,基函数不为零)。

根据上述分析:
![]() 即对应ui,ui+1,。。。到ui+k。
即对应ui,ui+1,。。。到ui+k。
可以得到节点空间如下:

这个时候我们会发现,这个节点空间和我们前面的B样条曲线表达式后面提供的定义空间不同,因为我们做了进一步定义空间的选取,以下图k=3,n=4为例,此时共计由8个节点,则每个基函数对应的定义空间如下,我们希望定义区间内包含所有的基函数,则选择定义区间时,我们选择从![]() (第一个基函数)的最后一个子区间[uk-1,uk],到
(第一个基函数)的最后一个子区间[uk-1,uk],到![]() (第n+1个基函数)的第一个区间[un,un+1],也就是图里面红色框框起来的位置,通过这样的选择方式,我们能够将所有的基函数包括在定义区间里面。因此我们定义区间的选择就是[uk-1,un+1]。
(第n+1个基函数)的第一个区间[un,un+1],也就是图里面红色框框起来的位置,通过这样的选择方式,我们能够将所有的基函数包括在定义区间里面。因此我们定义区间的选择就是[uk-1,un+1]。

5)B样条代码展示
import numpy as np
import matplotlib.pyplot as plt
# 定义二维点类
class Point2D:
def __init__(self, x, y):
self.x = x
self.y = y
def __repr__(self):
return f"({self.x}, {self.y})"
# 定义B样条曲线类
class BSplineCurve:
def __init__(self, control_points, degree, knot_vector=None):
"""
初始化B样条曲线
"""
self.control_points = control_points # 控制点坐标
self.degree = degree # 多项式阶数
self.num_control_points = len(control_points) # 控制点个数
# 生成均匀节点向量
if knot_vector is None:
self.knot_vector = self._generate_uniform_knot_vector()
def _generate_uniform_knot_vector(self):
"""
生成均匀的节点向量,这里为了确保起点和终点落在曲线上做了一个设置
"""
n = self.num_control_points - 1
p = self.degree
# 前面重复p+1个0,后面重复p+1个n-p+1
# list(range(1,n-p+1)),表示生成从1开始,到n-p的整数列表
# 以下共计n+p+1+1个节点,其中p+1是阶数
vector = [0] * (p) + list(range(1, n + 2 -p )) +[n-p+2]*(p)
print(vector)
return vector
def _basis_function(self, i, k, t):
"""
计算B样条基函数
:param i: 控制点索引 :param k: 次数
:param t: 参数值 :return: 基函数值
"""
if k == 1:
if self.knot_vector[i] <= t <= self.knot_vector[i+1]:
return 1.0
else:
return 0.0
else:
# 以下公式嵌套引用_basis_function()函数,k逐步递减,直至k=0,可以得到相应的结果
demo1=(self.knot_vector[i+k-1] - self.knot_vector[i])
if self.knot_vector[i+k-1] != self.knot_vector[i]:
coef1 = (t - self.knot_vector[i]) / demo1 * self._basis_function(i, k-1, t)
else:
coef1=0.0
demo2=(self.knot_vector[i+k] - self.knot_vector[i+1])
#print(i)
if self.knot_vector[i+k] != self.knot_vector[i+1]:
coef2 = (self.knot_vector[i+k] - t) / demo2 * self._basis_function(i+1, k-1, t)
else:
coef2=0.0
return coef1 + coef2
def calculate_point(self, t):
"""
计算曲线在参数t处的点
:param t: 参数值 t, 范围 [degress-1, num_points]
:return: 返回曲线在 t 处的 Point2D 点
"""
x = 0.0
y = 0.0
# i 从0-n
for i in range(self.num_control_points):
# 计算节点为t,的第i个k阶基函数的结果
b = self._basis_function(i, self.degree, t)
# 计算t节点对应的b样条曲线上的坐标点
x += b * self.control_points[i].x
y += b * self.control_points[i].y
return Point2D(x, y)
def generate_curve_points(self, num_points=100):
"""
生成B样条曲线上的点
:param num_points: 生成的曲线上点的数量 :return: 返回点列表,表示B样条曲线
"""
curve_points = []
# 这里的[-self.degree]就是倒着数的k个节点,也就是正着数的n+1个节点,因为总节点数是n+p+2
for t in np.linspace(self.knot_vector[self.degree-1], self.knot_vector[-self.degree], num_points):
#for t in np.linspace(self.knot_vector[self.degree-1], self.knot_vector[self.num_control_points], num_points):
#print(t)
curve_points.append(self.calculate_point(t))
return curve_points
# 使用示例
if __name__ == "__main__":
# 定义控制点
control_points = [Point2D(1, 1),
Point2D(2, 14),
Point2D(7, 22),
Point2D(9, 39),
Point2D(5, 49),
Point2D(6, 59),
Point2D(10,60)]
# 创建B样条曲线对象,阶数为4,次数为3(三次B样条)
b_spline_curve = BSplineCurve(control_points, degree=4, knot_vector=None) # 起点和终点为同一个
# 生成并输出曲线上的点
curve_points = b_spline_curve.generate_curve_points()
# 绘制控制点和曲线
control_x = [p.x for p in control_points]
control_y = [p.y for p in control_points]
curve_x = [p.x for p in curve_points]
curve_y = [p.y for p in curve_points]
#print(curve_x)
plt.figure(figsize=(8, 5))
plt.plot(control_x, control_y, 'ro--', label='Control Points')
plt.plot(curve_x, curve_y, 'b-', label='B-Spline Curve')
plt.title('B-Spline Curve')
plt.legend()
plt.grid()
plt.show()这个代码弄了好久,😄,最后发现是里面落了一个等于号,一定要仔细点,嘻嘻

2025.3.6 这几天看了这些方法,花了很多时间,先把这个分享一下,后面再补充其他算法吧!争取这一篇文章把所有的插值、规划方法弄清楚。
三、关节轨迹插值
参考教材:《机器人学》第三版,蔡自兴,谢斌编著。
1.思路
机械臂的路径点位姿已知(目标点,或路径点:X(1~n))==》运动学逆解计算(θ(1~n))==》利用插值算法对各个关节的角度轨迹进行拟合,注意:拟合时,各个路径点之间的运动时间相同。
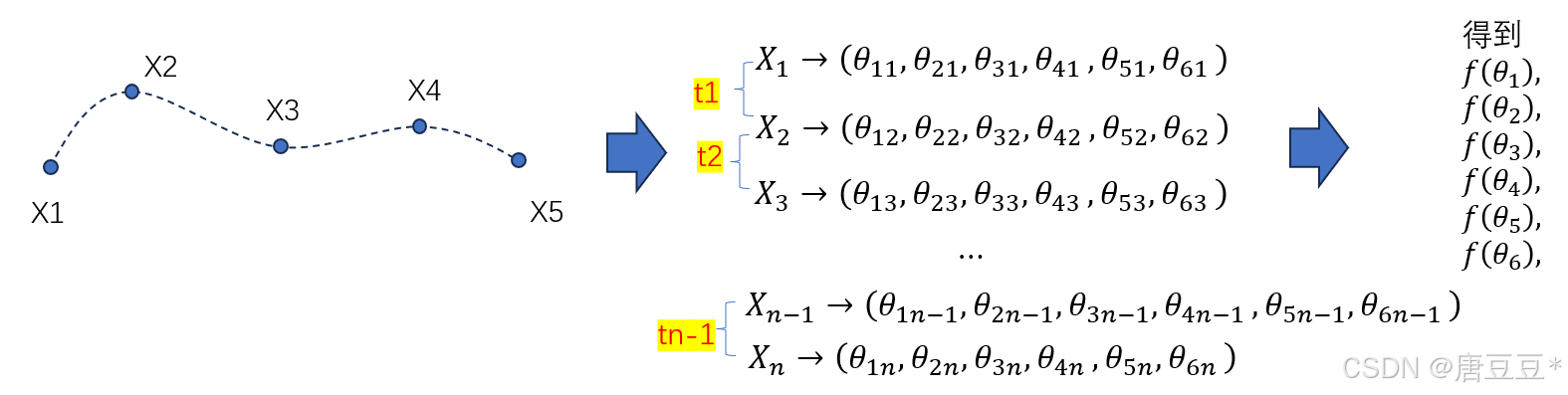
从这里看出来,采用第二节中不同的插值方法,可以得到不同的关节轨迹函数。为了保证平滑,一般要求一阶导数和二阶导数连续可导。插值也可以采用以下方法:
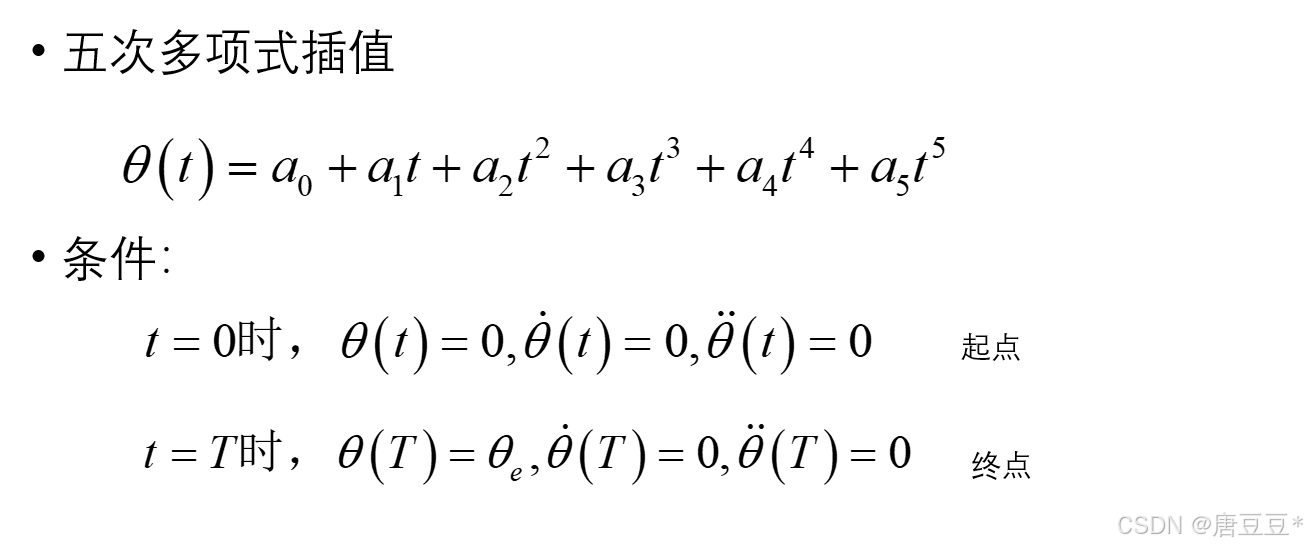
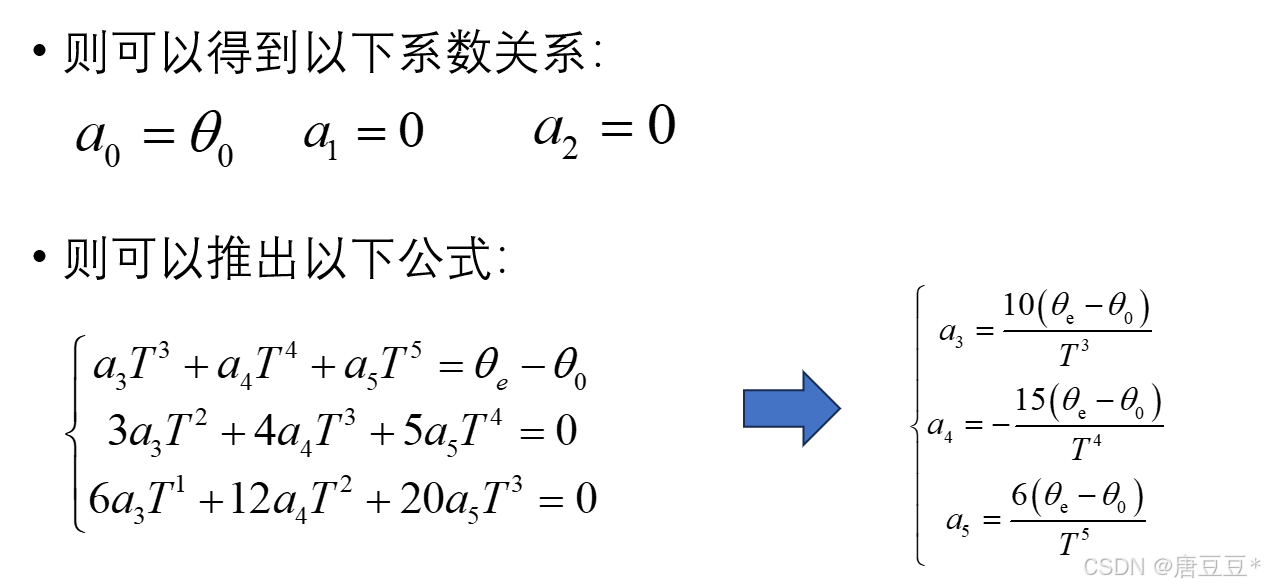
2.五次多项式插值
==》以下是对于点到点规划的五次多项式插值,已知起点的关节角度和终点的关节角度,用五次多项式拟合关节变量函数。
代码实现
# 本程序用于实现五次多项式插值
import numpy as np
import matplotlib.pyplot as plt
# 5次多项式规划
# q0:起始关节角,qf:终点关节角,T:总时长,dt:时间步长
def trajectory5(q0, qf, T, dt=0.01):
# 时间向量
t = np.arange(0, T + dt, dt)
# 五次多项式系数q(t)=a0+a1*t+a2*t**2+a3*t**3+a4*t**4+a5*t**5
a0 = q0
a1 = 0
a2 = 0
a3 = 10 * (qf - q0) / (T ** 3)
a4 = -15 * (qf - q0) / (T ** 4)
a5 = 6 * (qf - q0) / (T ** 5)
# 计算关节角度
q = a0 + a1 * t + a2 * t ** 2 + a3 * t ** 3 + a4 * t ** 4 + a5 * t ** 5
return t, q
# 多关节轨迹规划
# joint_angles_initial各关节的起始角度, joint_angles_final各关节的终点角度
def plan_joint_trajectories(joint_angles_initial, joint_angles_final, T, dt=0.01):
num_joints = len(joint_angles_initial)
t = np.arange(0, T + dt, dt) # 对于每一个关节变量,时间序列是一致的
q = np.zeros((len(t), num_joints))
for i in range(num_joints):
_, q[:, i] = trajectory5(joint_angles_initial[i], joint_angles_final[i], T, dt)
return t, q
# 示例:6关节轨迹规划
q0 = [0, 0, 0, 0, 0, 0] # 初始关节角度
qf = [np.pi/2, -np.pi/2, np.pi/6, np.pi/12, 0, np.pi/4] # 目标关节角度
T = 5 # 总运动时间
t, q = plan_joint_trajectories(q0, qf, T)
# 绘制每个关节的轨迹
for i in range(len(q0)):
plt.plot(t, q[:, i], label=f"Joint {i+1}")
plt.xlabel("Time (s)")
plt.ylabel("Joint Angle (rad)")
plt.title("Multi-Joint Trajectories")
plt.legend()
plt.grid()
plt.show()

















 787
787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









