







一、引言
笛卡尔轨迹规划的大体流程如下:
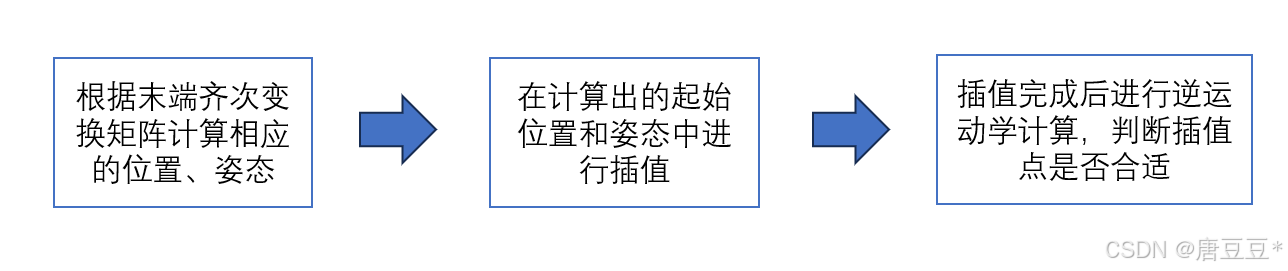
所以,我们规划的关键内容就是如何在起始位置和姿态中进行插值。
常用的方法有直线插补、圆弧插补、样条插补、多项式插补等。
1)常规直线插补
由于机械臂在实际应用中会存在需要它走直线完成指令的过程,所以直线插补必不可少。常规的直线插补就是直接按照时间进行插值,具体流程如下:
首先算出起点和终点的直线距离——然后计算插补步数——再算出各个插值点的位姿——最后计算各点的逆运动学进行检查
这个插补一般是按照时间进行插补的,常用的插补时间为0.25ms~0.4ms之间。利用时间插补时,插补步数![]() 。用这个公式可以快速计算出中间需要多少个插值点。
。用这个公式可以快速计算出中间需要多少个插值点。
具体插补点坐标计算公式如下:
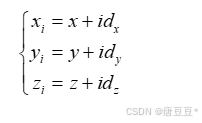
这样插值是非常简单的,也很好理解,但会有一个显著的不足。如果机械臂的轨迹由多条直线组成,那就会造成速度突变 ,速度突变某种意义上就意味着加速度在这里是接近无限大的。所以一般工程不会直接用这种直线插补。而会采用带二次多项式过渡的直线插补策略。
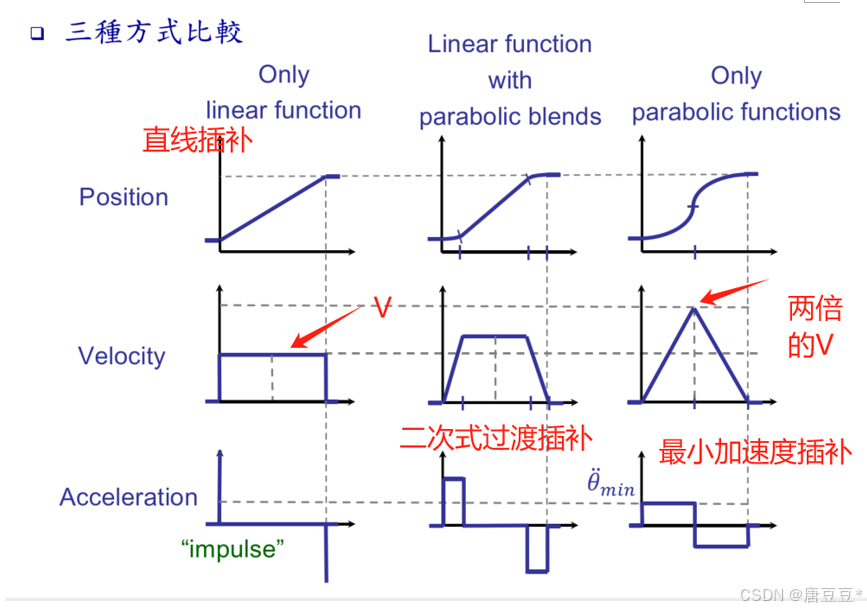
2) 添加过渡的优势
上图的最左边就是只用直线插补的方法,这个时候速度突然就做出改变,加速度接近无穷。从电机的使用角度上来看,我们一般是希望避免这种情况的。中间这个图,在起点和终点处,分别插入了一段圆弧,这个时候,速度经历了一小段时间才达到直线段的速度,所以这里加速度虽然发生了突变,但是,加速度是个定值,相对而言运动轨迹就会更加平滑。右边这个图对应的是采用最小加速度进行插补的结果,我们可以看到最小加速度对应的加速时间就是整个行程时间的一半。
二、过渡方法
那具体怎么做过渡呢?其实就是在两段直线段处,添加一段抛物线(二次多项式),这个时候,速度就可以连续变化了。
我们可以一起看一下这个抛物线的设定,这个抛物线段,本质就是做一个等加速运动,将速度从v(0)变成v(end),所以可以用到以下的通用表达式。
等加速运动的位移表达式如下:
![]()
其中,加速度可以采用如下方式计算:
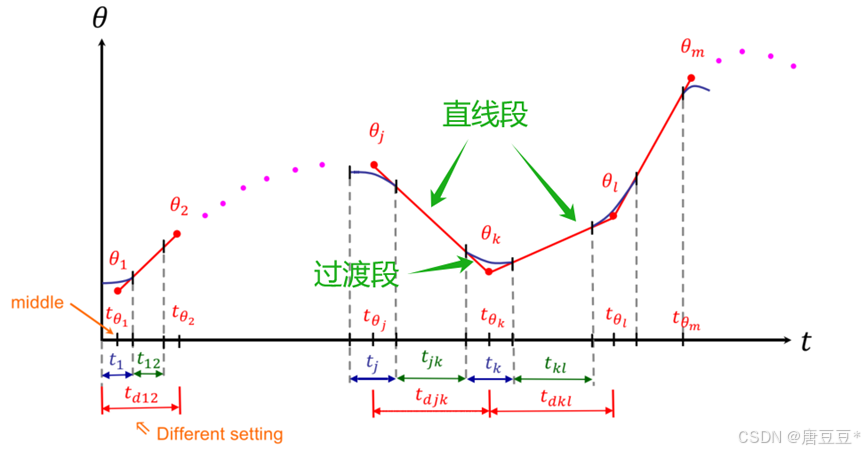
那具体放到我们的路径规划里面,就需要进一步做一些设定,假定我们现在已知4个点的坐标,那插值的时候就有4段抛物线,3段直线段。如下图所示:
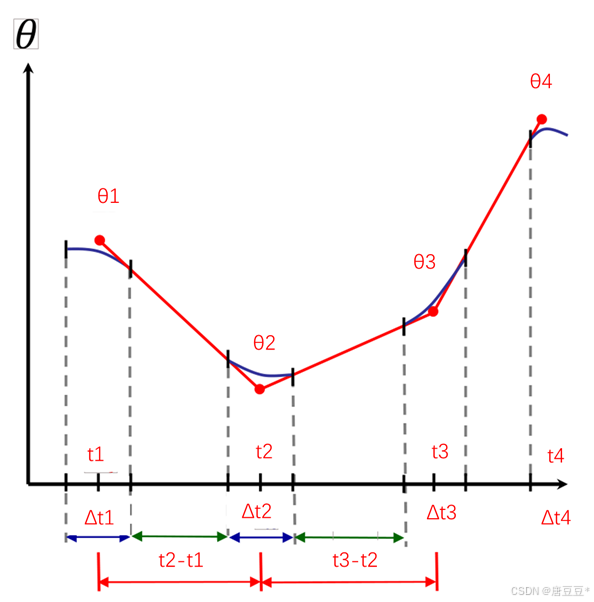
这里可以用以下数组表示:
- 位置点:[θ1,θ2,θ3,θ4]
- 时间点:[0, t1, t2, t3, t4]
- 速度:[0, v1, v2,v3, 0] 这里补充了起始速度和结束速度为0。
- v1=(θ2-θ1)/(t2-t1);v2=(θ3-θ2)/(t3-t2);v3=(θ4-θ3)/(t4-t3)
我们要的是这个插值位置与时间的关系,那就需要分直线段和抛物线段来讨论。
直线段:

抛物线段:

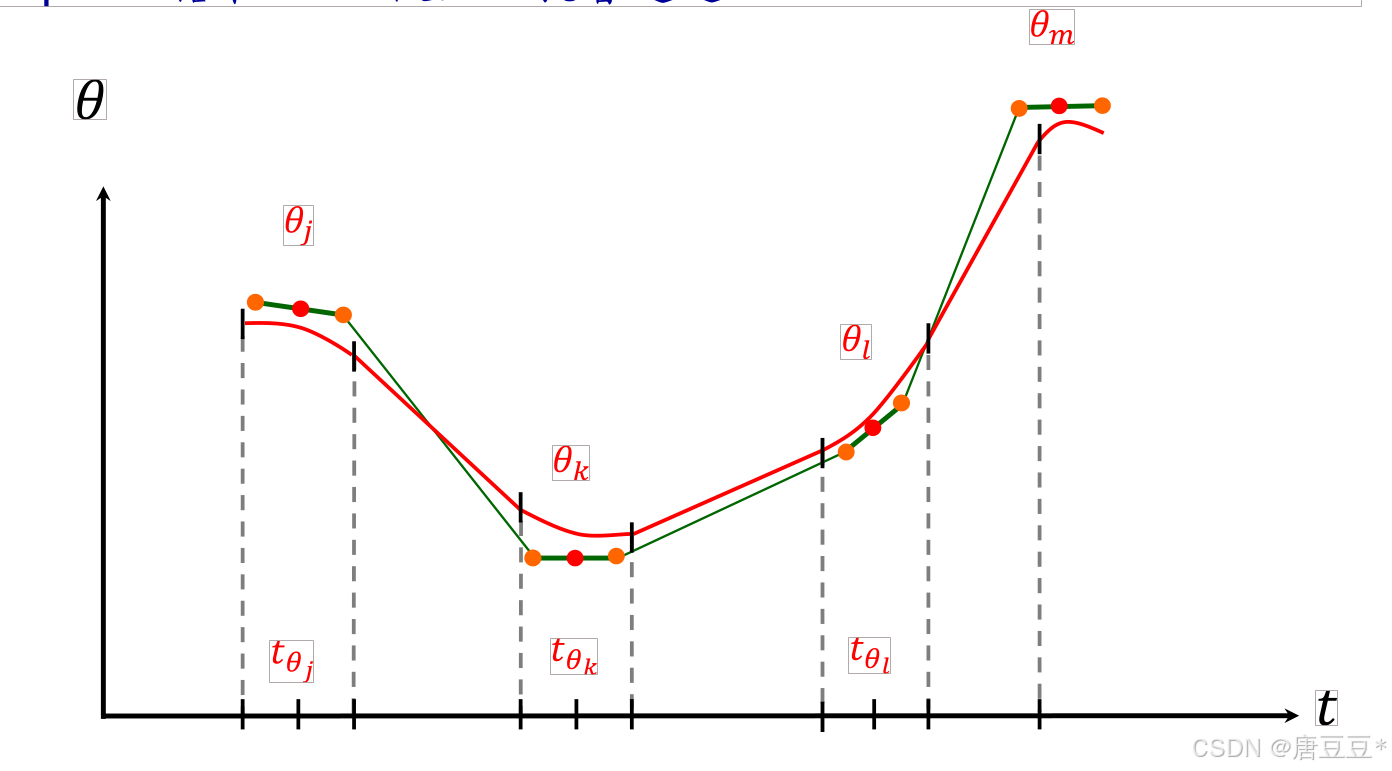
起始段和最后段的抛物线表达式与上述表达式一致,但是定义域略有差别。但从上述的图像可以看出,这样插值会有一个特点,就是路径点不在轨迹上,如果机械臂没有要求必须经过路径点,这个不影响,但是如果机械臂要求必须经过路径点,那么就需要略加修改。
在路径点的附近再添加上两个点作为路径点,然后让设定的路径点位于直线路径上就可以了。此时路径点肯定会位于轨迹上。因为直线上的点是必然会通过的。
三、代码
import numpy as np
import matplotlib.pyplot as plt
def count_vec(t0, t1, x0, x1):
V = (x1-x0) / (t1-t0)
return V
def count_a(v0, v1, detat):
a = (v1-v0)/detat
return a
def linear( t, x, v, deltat, num_point1,numpoint2):
q_total=[]
t_total=[]
for i in range(len(x)):
if i == 0:
# 第一段只有二次段
t_dot = np.linspace(t[i],t[i+1]+deltat/2,num_point1)
a=(v[i+1]-v[i])/deltat
print(a)
q = x[i] + 0.5 *a *(t_dot-t[i+1]+deltat/2)**2
q_total.append(q)
t_total.append(t_dot)
else:
# 其余段是一个直线段+一个二次段组合而成
# 直线段插值
t_dot1 = np.linspace(t[i]+deltat/2,t[i+1]-deltat/2,num_point2)
q1=x[i-1] + v[i] * (t_dot1 - t[i]) # 直线段
q_total.append(q1)
t_total.append(t_dot1)
# 二次段插值
if i==len(x)-1:
t_dot2 = np.linspace(t[i+1]-deltat/2,t[i+1],num_point1) # 最后一段
else:
t_dot2 = np.linspace(t[i+1]-deltat/2,t[i+1]+deltat/2,num_point1) # 中间段
a2=(v[i+1]-v[i])/deltat
q2 = x[i-1]+v[i]*(t_dot2-t[i])+0.5 * a2 *(t_dot2 - t[i+1] + 0.5*deltat)**2
q_total.append(q2)
t_total.append(t_dot2)
q_total= np.concatenate(q_total)
t_total=np.concatenate(t_total)
return q_total, t_total
t = np.array([0, 1, 15, 20])
x = np.array([2, 4, 6])
# 计算速度
v=[0]
for i in range(len(x)-1):
v1 = count_vec(t[i+1],t[i+2],x[i],x[i+1])
v.append(v1)
v.append(0)
print(v)
deltat = 2
num_point1 = 100
num_point2 = 500
# 调用函数
q_total, t_total= linear(t, x, v, deltat, num_point1, num_point2)
#print(len(q_total))
#print(len(t_total))
# 打印结果
#for q in q_total:
# print(q)
plt.figure(figsize=(10, 6))
plt.plot(t_total, q_total, label='Interpolated Points')
plt.scatter(t[1:], x, color='red', label='Data Points')
plt.xlabel('Time')
plt.ylabel('Position')
plt.title('Linear Interpolation with Quadratic Transition')
plt.legend()
plt.grid(True)
plt.show()
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









