







以下是本人在学习路径规划过程中的一些总结,借着机会写了一下,有不妥之处欢迎批评指正,谢谢。
路径规划部分在无人车架构体系当中分属控制或决策部分,如图1,是实现无人化驾驶的关键技术之一。路径规划模块性能的高低直接关系车辆行驶路径选择的优劣和行驶的流畅度,而路径规划算法的性能优劣很大程度上取决于规划算法的优劣,如何在各种场景下迅速、准确的规划出一条高效路径且使其具备应对场景动态变化的能力是路径规划算法应当解决的问题。
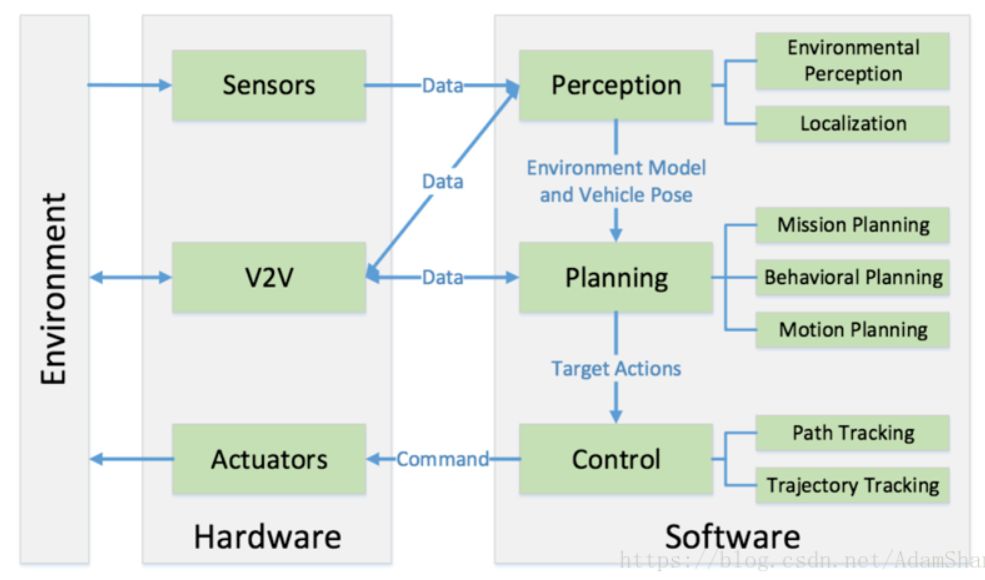
图 0.1
根据对环境信息的把握程度可把路径规划划分为基于先验完全信息的全局路径规划和基于传感器信息的局部路径规划。其中,从获取障碍物信息是静态或是动态的角度看,全局路径规划属于静态规划,局部路径规划属于动态规划。全局路径规划需要掌握所有的环境信息,根据环境地图的所有信息进行路径规划;局部路径规划只需要由传感器实时采集环境信息,了解环境地图信息,然后确定出所在地图的位置及其局部的障碍物分布情况,从而可以选出从当前结点到某一子目标结点的最优路径。
在全局路径规划算法中,大致可分为三类:传统算法(Dijkstra算法、A*算法等)、智能算法(PSO算法、遗传算法、强化学习等)、传统与智能相结合的算法。智能算法种类繁多,但传统算法更为基础,故本着由浅入深的原则,首先对传统算法展开学习。
1 算法综述
在传统路径规划算法中,各种算法的实现原理和应用范围差异很大,但可以将以下五种算法看作一类(Dijkstra、A*、D*、LPA*、D* lite)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4994
4994

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









