








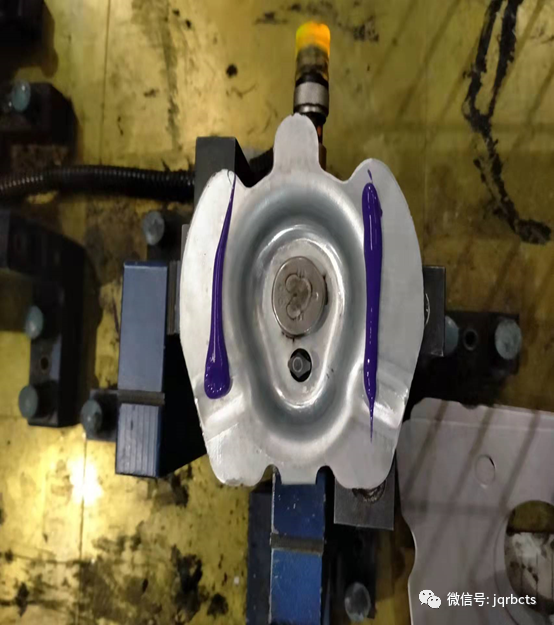
关于涂胶机涂胶太宽的原因是,机器人涂胶嘴太贴近产品导致涂胶太宽,机器人的轨迹往Z轴向上抬,如果出现涂胶轨迹弯曲,说明机器人离产品距离比较远,Z轴向下抬。
发那科机器人涂胶开始指令ss,涂胶结束指令se。关于机器人涂胶机,经常设备没有关机需要重新启动机器人和涂胶机,并且机器人要给涂胶机远端启动信号remote,这样涂胶机有模式,涂胶机的预压信号不能一直给,给个脉冲信号就可以了。注意涂胶机经常不使用要清胶,不然会凝固机器人胶嘴。
FANUC机器人系统在维修当中必须替换两种电池:替换控制器主板上的电池和机器人本体上的电池。
1.替换控制器主板上的电池
程序和系统变量存储在主板上的SRAM中,由一节坐落于主板上的锂电池供电,以留存数据。当这节电池的电压严重不足时警( SYST-035 Low or No Battery Power in PSU)。当电压显得更较低时, SRAM中的内容将无法备份,这时必须替换原有电池,并将原先备份的数据
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2502
2502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











