






1、先镜像备份好机器人系统程序文件
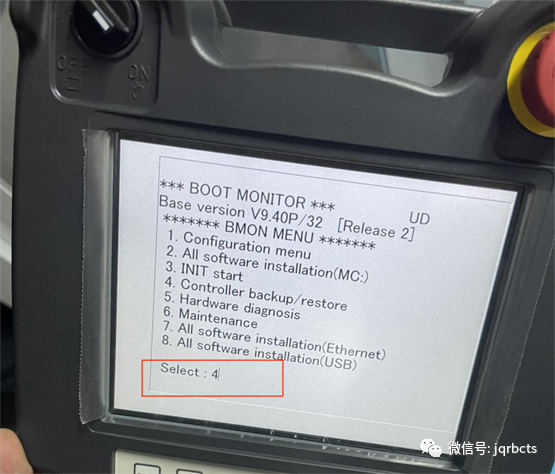
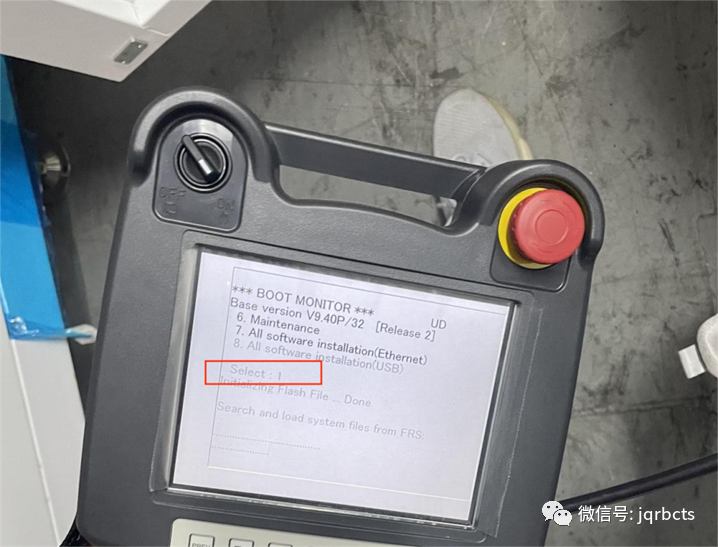
2、F1和 F5镜像备份后关机重启进入控制模式导入已配置好的镜像Modbus程序文件(选择第4个选项)
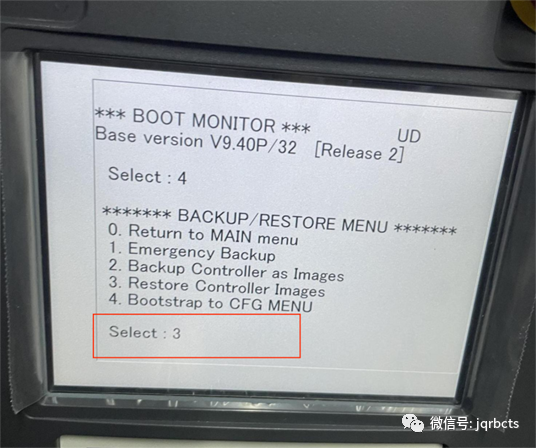
3、再进入控制柜写入(选择第3个)
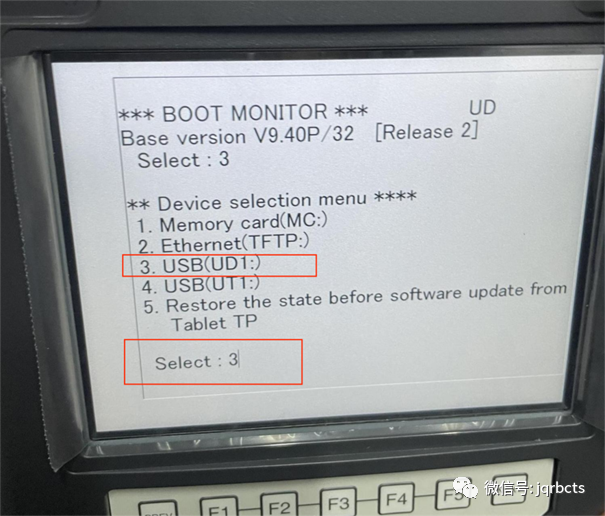
3、再进入UD1(选择第3个)
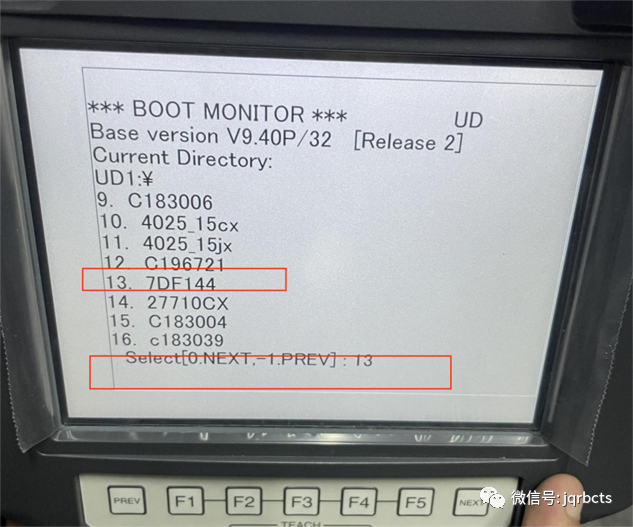
4、选择要刷入的文件
5、再选择第一个进入
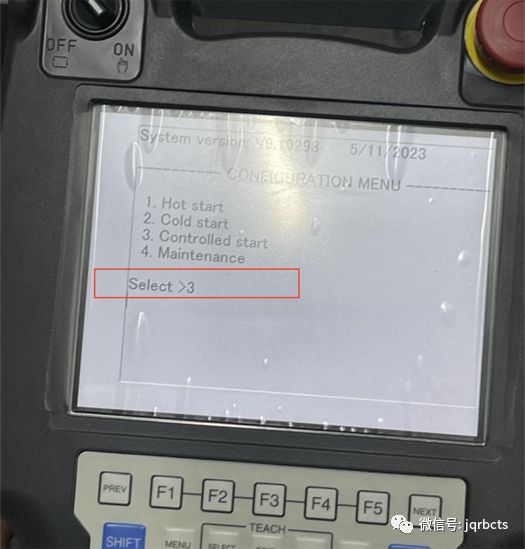
6、选择第3个控制器启动
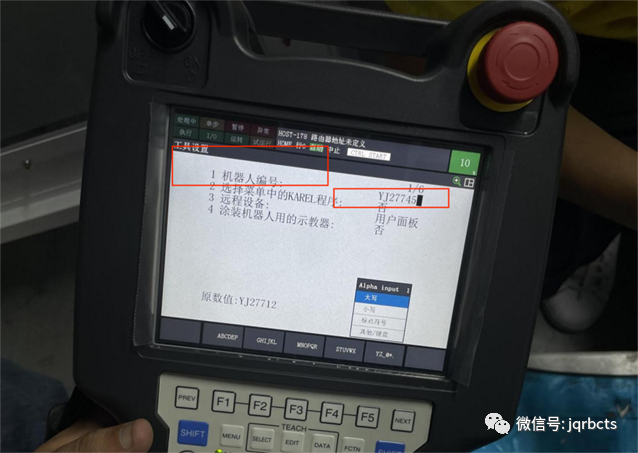
7、冷启动完之后进入工具设置编辑机器人编号
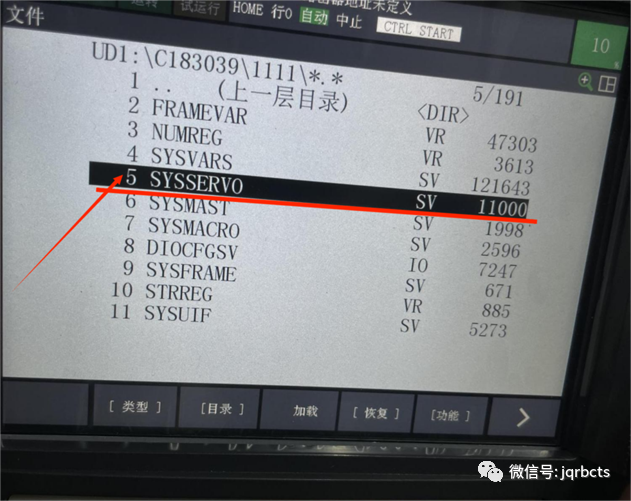
8、进入UD1单独加载一次变量SYSSERVO伺服数据 SYSMAST 零点变量
9、最后把原来镜像备份好的机器人系统程序文件再导入进机台,选择第6个恢复以上所有
1、先镜像备份好机器人系统程序文件
2、F1和 F5镜像备份后关机重启进入控制模式导入已配置好的镜像Modbus程序文件(选择第4个选项)
3、再进入控制柜写入(选择第3个)
3、再进入UD1(选择第3个)
4、选择要刷入的文件
5、再选择第一个进入
6、选择第3个控制器启动
7、冷启动完之后进入工具设置编辑机器人编号
8、进入UD1单独加载一次变量SYSSERVO伺服数据 SYSMAST 零点变量
9、最后把原来镜像备份好的机器人系统程序文件再导入进机台,选择第6个恢复以上所有











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 7511
7511







