







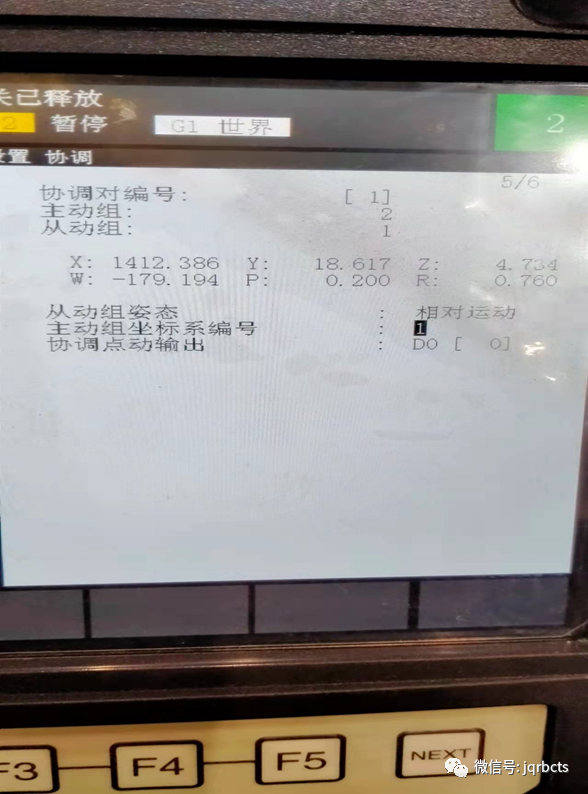
发那科机器人添加外部轴需要和机器人6轴协调运动,则考虑协调指令COORD
设定主动组和从动组,以及相对运动
COORD指令是在运动指令后面按指令菜单添加
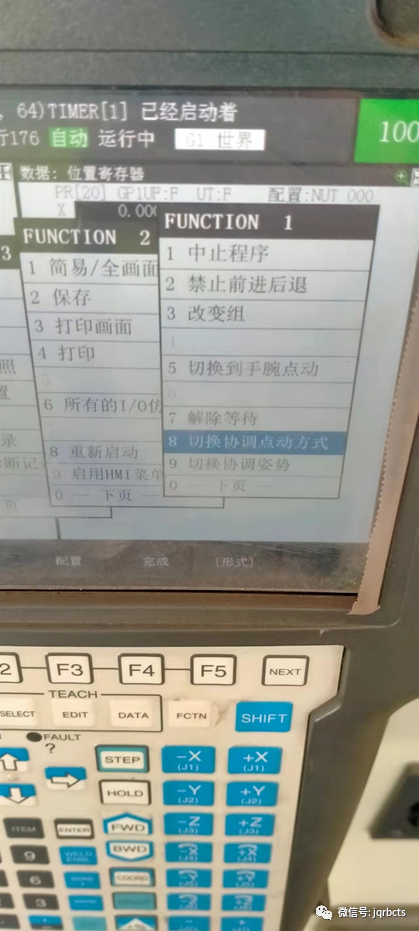
按键FCTN功能键右击选择8切换协调点动方式,则机器人和变位机按某一方向同时旋转,如需要退出这种方式,则FCTN功能键右击选择8切换协调点动方式,需要机器人单独调试可以按group切换G1或者G2关节
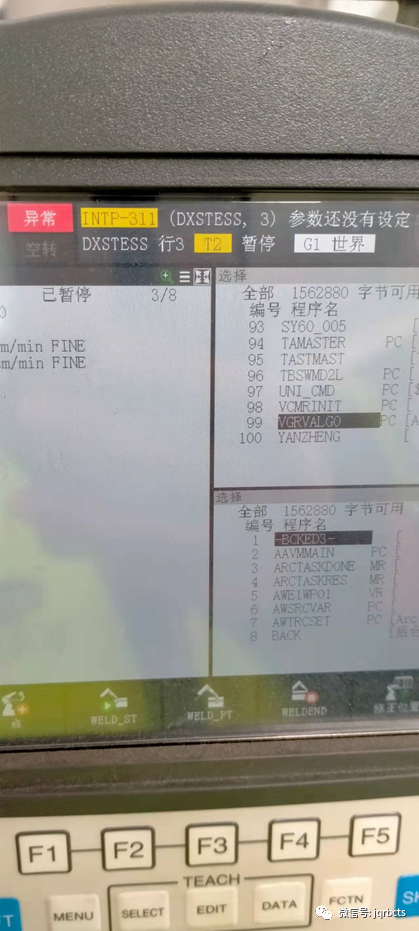
关于下面intp什么报警代码,参数还没有设置报警,机器人打t2模式,示教器有效,按示教点位无法示教,则需要修改组掩码,注意组掩码在建立程序完设置,按end结束建立没有修改组掩码,则复制程序程序建立程序名称
1,1,*,*,*,
第一个代表G1
第2个代表G2
第3个代表G3 G3关节没有则需要关闭为*
则示教有效
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7532
7532

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











